一种频域特征提取自编码器及其在故障诊断中的应用研究
2021-10-29 09:48:34赵志宏李乐豪杨绍普
中国机械工程 2021年20期
赵志宏 李乐豪 杨绍普 李 晴
1.省部共建交通工程结构力学行为与系统安全国家重点实验室,石家庄,0500432.石家庄铁道大学信息科学与技术学院,石家庄,050043
0 引言
目前,故障诊断的传统方法以信号处理技术为基础,分别在时域、频域、时频域上提取故障特征信息以实现诊断[1-3]。传统方法的特征需要人工提取,并且提取到的往往是浅层故障特征。
2006年HINTON等[4]提出了深度学习理论,深度神经网络具有强大的自动特征提取能力,能够拟合复杂映射关系,在很多领域掀起了研究浪潮,在计算机视觉[5]和自然语言处理[6]领域的发展尤为迅速。近年来,深度学习在机械故障诊断方面的研究越来越得到专家学者的关注,取得了不少研究成果。已经用于故障诊断的深度网络模型有卷积神经网络[7-8]、循环神经网络[9-10]、深度信念网络[11-12]、降噪自编码器[13-14]等。降噪自编码器是一种改进的自编码器,在输入信号被损坏的情况下,可以重构出无噪声的输入,以此提高特征提取的鲁棒性。降噪自编码器的主要优势在于它是一种无监督学习模型,可以提取输入数据的本质特征。在降噪自编码器训练的过程中由于输入数据较为复杂,重构难度较大,会导致神经网络不容易收敛,同时缺少标签信息的参与,使得模型很难提取到低维且富含类别信息的特征[15],这也是自编码器普遍存在的问题。
为了解决网络训练不收敛问题,一些专家学者使用信号的频谱代替时域信号作为自编码器的输入,取得了较好的特征提取能力,在故障分类和寿命预测任务中均取得了比较好的效果。雷亚国等[16]使用堆叠自编码方法提取行星齿轮故障特征,实现了行星齿轮故障100%的分类准确率。 LI等[17]使用深度卷积自编码器网络,将距离度量学习和k-means聚类方法集成到神经网络模型中,在标签数据较少的半监督学习任务上取得了良好的故障诊断性能,另外也适用于无监督的情况。唐守强等[18]使用改进的稀疏自编码器提取能够表征轴承退化趋势的特征,然后利用Bi-LSTM进行滚动轴承寿命预测。这些工作都是将频谱作为自编码器网络的输入以提取频域特征,需要对原始信号进行傅里叶变换,能否直接从时域信号中提取频域特征是一个非常有价值的研究课题。本文提出一种直接从原始时域信号提取频域特征的降噪自编码器方法,与传统自编码器以利用原始信号作为目标输出不同,这里使用频谱作为目标输出训练网络模型,训练后的自编码器可以从时域信号中提取频域特征信息。为了便于叙述,将本文提出的以提取频域特征为目标的降噪自编码器称为频域自编码器。
1 降噪自编码器


图1 降噪自编码器结构Fig.1 Structure of denoising auto-encoder
2 频域自编码器
2.1 频域自编码器模型
传统自编码器的目标输出为重构原始信号,编码器的任务是拟合从原始信号到特征的映射关系,解码器的任务为拟合从特征到原始信号的映射关系,因此传统自编码器为对称结构。为了能够从时域信号中提取频域特征,本文在降噪自编码器的基础上设计了一种提取频域特征非对称的自编码器。模型结构如图2所示,主要由卷积层和全连接层组成。
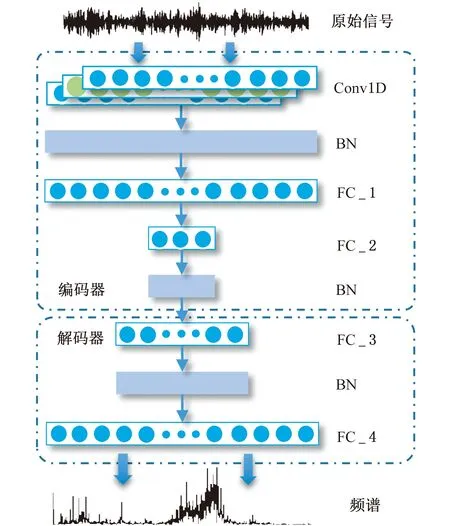
图2 频域自编码器模型结构Fig.2 Model structure of frequency domain auto-encoder
编码器第一层为卷积层,使用大尺度卷积核对受损坏的信号进行特征提取,并且拥有一定程度上的降噪效果。在卷积层后使用批标准化层缓解梯度消失,加快训练速度[19]。选取LeakyReLU作为编码器各个网络层的激活函数,以避免由于特征稀疏导致的表征能力下降[20]。然后通过两个全连接层来实现降维。解码器由两个全连接层组成,两个全连接层分别使用激活函数LeakyReLU和ReLU,并在之间使用批标准化。
编码器加上分类器后的故障诊断模型如图3所示,分类器使用两层全连接神经网络,激活函数分别为ReLU和Softmax。

图3 故障诊断模型结构Fig.3 Structure of fault diagnosis model
本文频域自编码器网络模型中的重要参数如表1所示,其中LeakyReLU激活函数中alpha的取值为0.3。
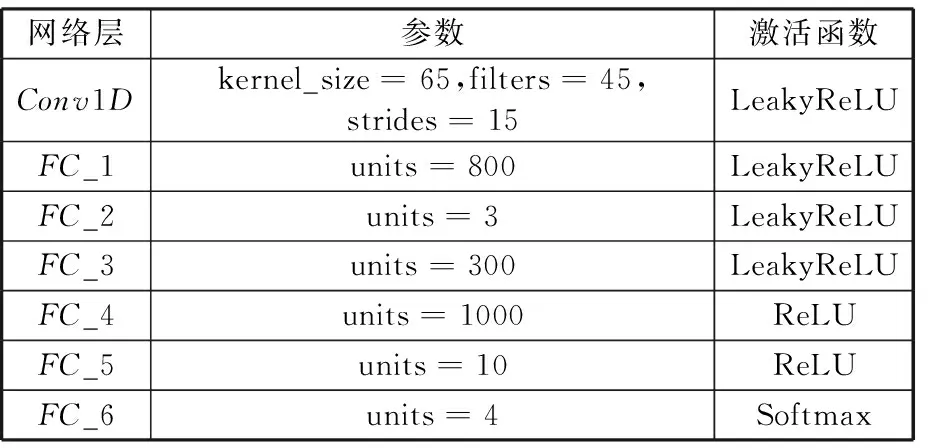
表1 网络参数
2.2 频域自编码器特征提取方法
频域自编码器特征提取流程图如图4所示,步骤如下:
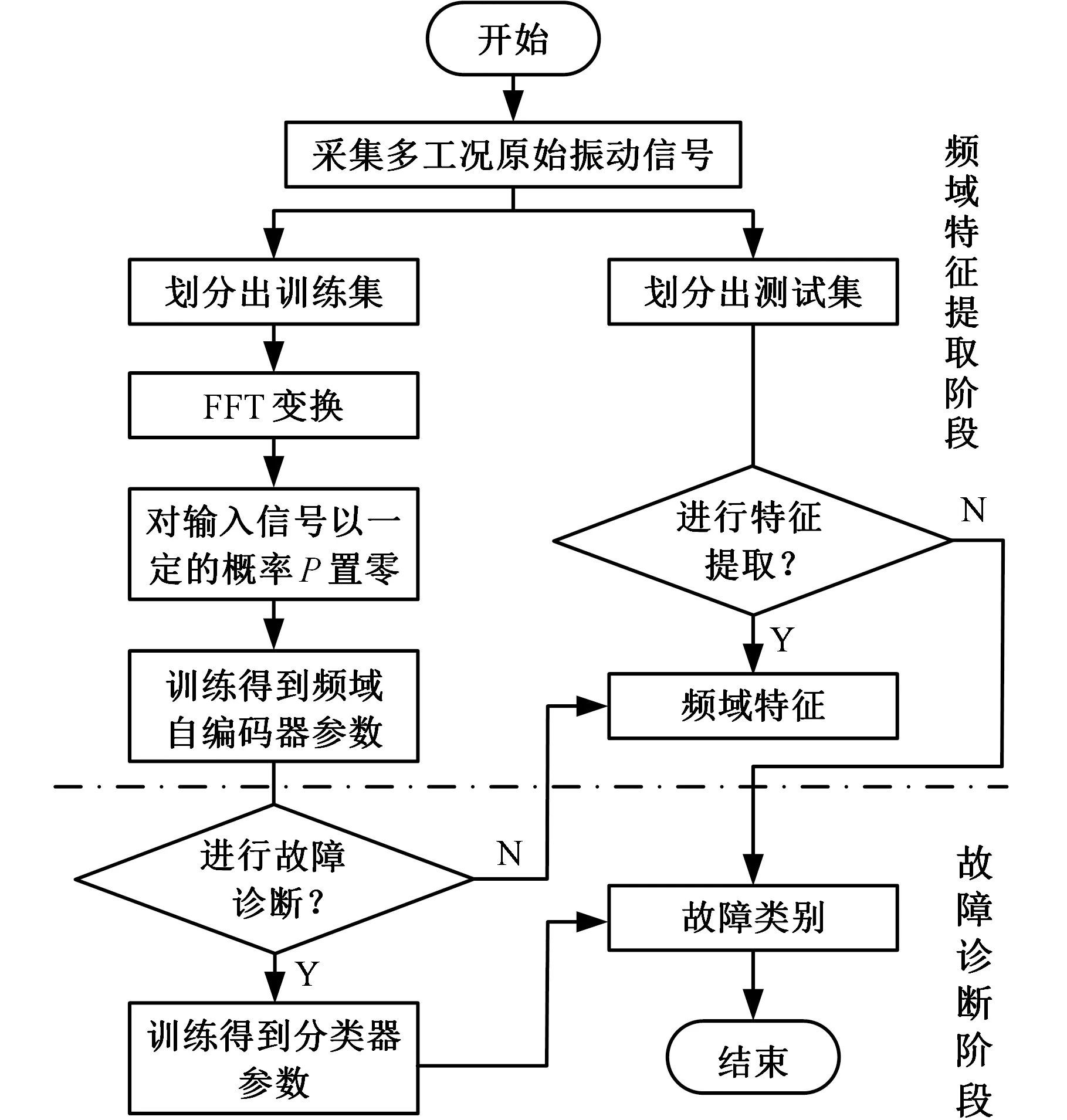
图4 频域特征提取流程图Fig.4 Flow chart of feature extraction infrequency domain
(1)采集原始振动信号。
(2)将原始信号划分为训练集和测试集。
(3)使用傅里叶变换获取训练集的频谱。
(4)采用文献[13]的方法对训练集中的振动信号以一定的概率P置零得到受损信号作为频域自编码器的输入,这里置零的概率为20%。将振动信号对应的频谱作为重构目标,损失函数为
(2)

使用Adam优化器训练得到频域自编码器网络的参数,学习率设置为0.003。
(5)去掉频域自编码器网络中的解码器。将测试集中的诊断信号输入编码器得到的输出即为原始信号的频域特征信息 。
(6)在编码器后面接上分类器,固定编码器参数,利用训练集中的振动信号和对应的故障类型标签训练得到分类器的参数。
(7)将测试集中的振动信号输入网络进行故障分类。
3 轴承振动信号特征提取实验
3.1 数据来源与数据处理
本文选取凯斯西储大学公开滚动轴承数据[21]进行验证。滚动轴承型号为SKF6205-RS JEM SKF。数据采集系统由电机、矩阵传感器、功率计和电子控制设备组成,采样频率为48 kHz。使用电火花在轴承的滚动体、内圈和外圈加工出故障,故障大小为0.1778 mm。包含正常状态的轴承在内,共计4种不同状态的轴承,在1HP、2HP和3HP 3种负载下采集振动信号。
为了避免神经网络过拟合,同时减轻相位对特征提取造成的影响,使用滑动窗口采样分别对训练集和测试集扩充样本。采样过程如图5所示,采样窗口长度为2000个采样点,窗口滑动的步长为28个采样点。使用滑动窗口采样法分别对3种负载下的4种故障类型的轴承振动数据各采集2000个样本,对故障类型使用One-Hot编码。
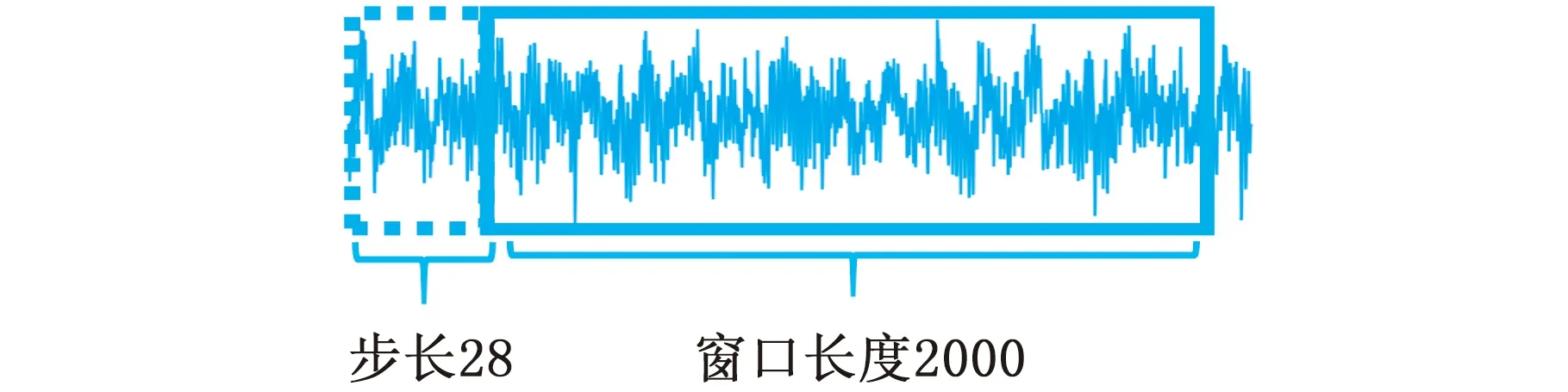
图5 滑动窗口采样Fig.5 Sliding window sampling
根据样本的负载不同数据集划分为3个,其中数据集A负载为1HP,数据集B负载2HP,数据集C负载3HP。每个数据集均包含4类故障数据,即滚动体故障、内圈故障、外圈故障和正常状态故障,每个数据集的每类数据样本均为2000个。
3.2 对比实验
为验证频域自编码器的特征提取效果,与传统降噪自编码器进行对比实验。本文设计的传统自编码器网络参数与频域编码器中的网络参数大致相同,不同的是,传统自编码器FC_3的神经元个数为600,FC_4的神经元个数为2000,该层不使用激活函数。
3.2.1特征提取实验
将数据集A、B和C混合,从每类样本中取75%作为训练集用于训练自编码器,剩余25%作为测试集。为了直观地展示提取到的特征,利用t-SNE降维可视化方法[22]对特征进行降维聚类,并与传统自编码器方法进行对比。
频域自编码器对测试集进行特征提取后通过t-SNE降至二维的结果如图6所示,其中特征1、特征2分别为频域自编码器特征经过t-SNE降低后获取的2个特征值。从图中可以看到不同类别的故障信号之间有着清晰的界限,可以有效的区分不同类别的故障信号。

图6 频域自编码器特征降维结果Fig.6 Feature dimension reduction results of frequencydomain auto-encoder
传统自编码器对测试集进行特征提取后通过t-SNE降至二维的结果如图7所示,从图中可以看到对外圈故障和正常轴承有一定的聚类效果,但是滚动体故障和内圈故障混杂在了一起,并且正常轴承中也掺杂了部分外圈故障和滚动体故障,不足以有效区分不同故障信号。
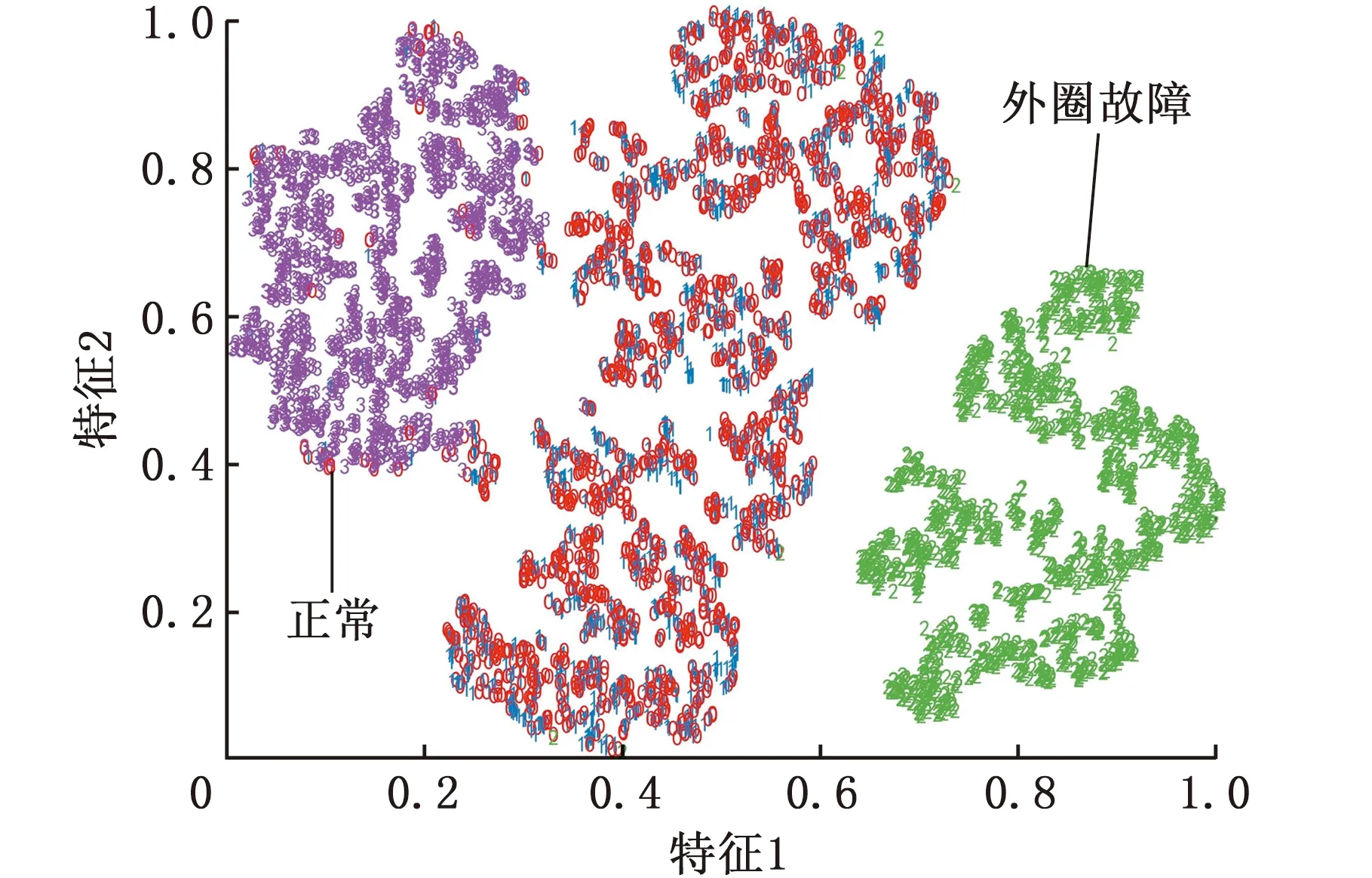
图7 传统自编码器特征降维结果Fig.7 Feature dimension reduction results oftraditional auto-encoder
频域自编码器和传统自编码器提取到的特征在三维空间中的分布分别如图8和图9所示,从图中可以看到频域自编码器提取的不同类别轴承特征之间存在着清晰的界限。正常轴承、滚动体故障和内圈故障的类内间距比较小,外圈故障的类内间距较大但是与其他类别可以准确区分。传统自编码器提取到的特征在空间中的分布规律则较差,只能看到外圈故障和内圈故障轴承,滚动体故障和正常轴承被它们包围而无法看到。另外,正常轴承、滚动体故障和内圈信号之间的界限不清晰,无法区分4种类别轴承。
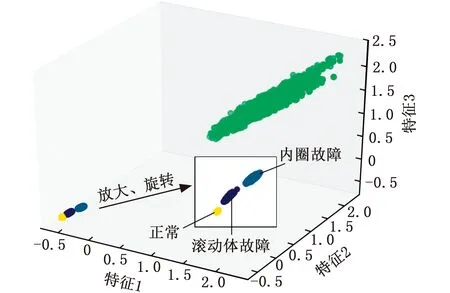
图8 频域自编码器特征在三维空间中的分布Fig.8 Distribution of frequency domain auto-encoderfeatures in three dimensional space
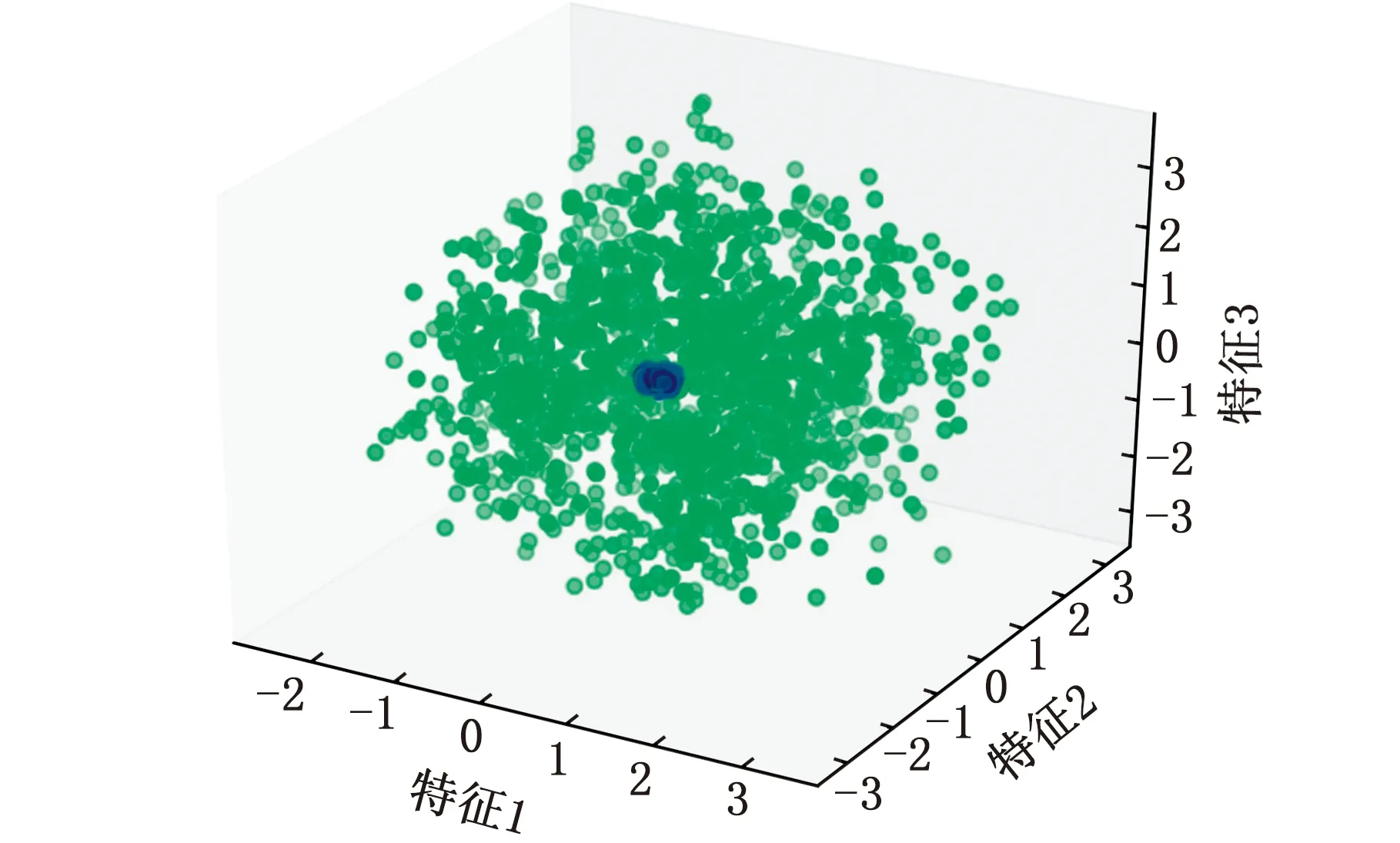
图9 传统自编码器特征在三维空间中的分布Fig.9 Distribution of traditional auto-encoder featuresin three dimensional space
3.2.2频谱重构实验
测试集中4类振动信号的频谱和频域自编码器重构的频谱如图10所示,从图中可以看到频域自编码器可以较好地重构信号的频谱。滚动体故障、内圈故障、外圈故障和正常状态的频谱中幅值较高的频率都进行了重构,其中外圈故障的频谱和重构频谱相似度最高,其他重构频谱虽然频率较低的部分有所丢失,但是保留了主要的频谱特征,验证了本文的频域自编码器方法可以在不经过傅里叶变换的情况下就可以提取信号的频域特征。
4 故障诊断实验
4.1 问题描述
在机械设备的运转过程中,负载的变化会影响时域波形,常常会造成故障的误报和漏报,对网络模型的特征提取能力提出了更高的要求[23]。在实际生产环境中,很难判断轴承发生故障的时间,因此对实际工作环境下收集的轴承振动信号添加标签有一定难度。一个好的特征提取方法应该对故障类型敏感,对负载不敏感,并且需要的标签数量尽量少。为进一步验证本文所提频域自编码器的特征提取能力,进行故障诊断泛化实验,设计训练集与测试集为不同负载,分别在不同标签数量的情况下进行实验。

(a)滚动体故障频谱 (b)重构的滚动体故障频谱 (c)内圈故障频谱
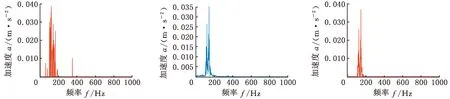
(d)重构的内圈故障频谱 (e)外圈故障频谱 (f)重构的外圈故障频谱
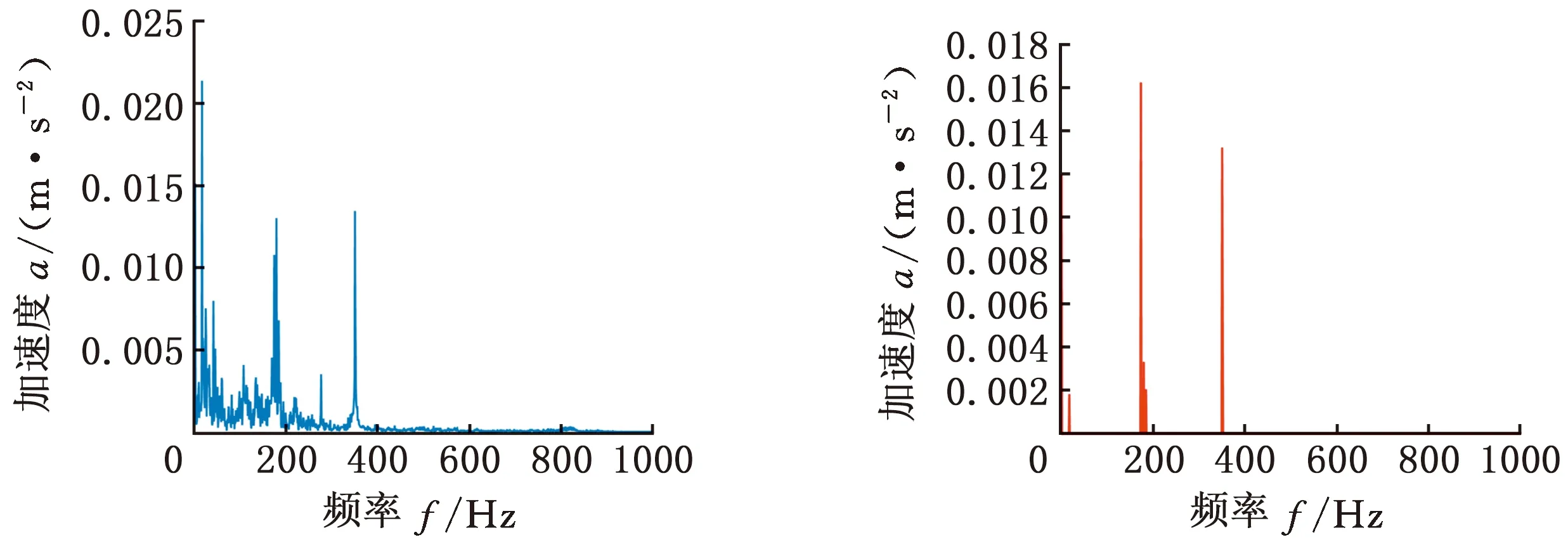
(g)正常状态频谱 (h)重构的正常状态频谱图10 频谱与重构频谱的对比Fig.10 Comparison of spectrum and reconstructed spectrum
4.2 泛化实验设计
使用两种负载下的数据集中全部的振动信号作为训练集,使用剩余负载的全部振动信号作为测试集。
方法1为上文使用的传统自编码器,分类器参数设置和训练流程与频域自编码器保持一致。方法2为端到端训练的深度神经网络,使用有标签样本进行训练,网络组成为编码器拼接上分类器,网络参数设置与频域自编码器一致。
分别使用训练集中100%、10%和1%的有标签样本训练频域自编码器方法和方法1中的分类器,分别使用训练集中100%、10%和1%的有标签样本端到端训练方法2中的深度神经网络。训练频域自编码器时迭代训练300代,训练分类器时迭代训练2000代。方法1中自编码器和分类器训练代数和频域自编码器方法保持一致;方法2中深度神经网络迭代训练2000代。
4.3 泛化实验结果分析
频域自编码器、方法1和方法2分别在100%、10%和1%的有标签样本训练分类器时的故障分类准确率如图11~图13所示。图中“AB→C”的意思为使用数据集A和B作为训练集,使用C作为测试集,其他情况以此类推。由不同方法的故障诊断准确率可以看出,方法1的故障诊断性能最差,故障分类准确率不到70%。方法2中在标签充足时,故障诊断准确率也较高,但是在少量标签的情况下,故障诊断准确率下降到了80%以下。本文提出的频域自编码器方法不管是在标签充足还是在少量标签的情况下,都可以保持较好的故障诊断准确率。
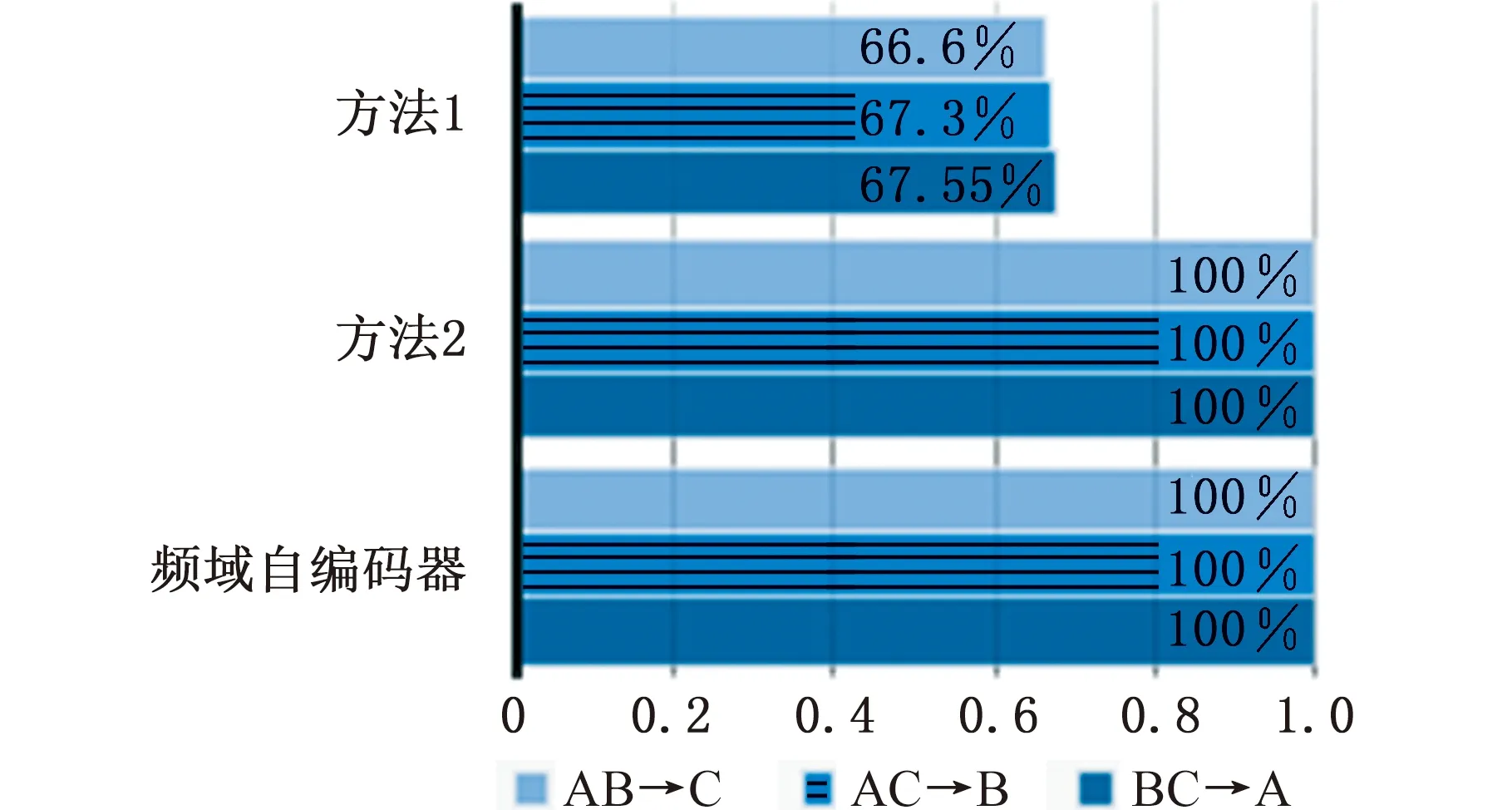
图11 使用100%有标签样本训练分类器的准确率对比Fig.11 Accuracy comparison of training classifierswith all labeled samples

图12 使用10%有标签样本训练分类器的准确率对比Fig.12 Accuracy comparison of training classifierswith 10% labeled samples

图13 使用1%有标签样本训练分类器的准确率对比Fig.13 Accuracy comparison of training classifierswith 1% labeled samples
方法1、方法2和频域自编码器方法在进行故障分类时所使用的模型结构是一样的,但是最终的结果相差较大。分析其原因,方法1在自编码器训练的阶段没有训练出可以有效提取故障特征的编码器,影响到了最终的故障诊断准确率。方法2由于是直接端到端训练出全部参数,整个网络提取的特征是为了拟合从振动信号到故障标签的映射关系,当样本较少时,由于噪声和相位的影响,网络不能充分学习故障特征,最终导致故障诊断准确率不高。频域自编码器方法可以提取故障信号更本质的特征,因此在标签较少的情况下也可以取得较好的故障分类准确率。
5 结论
(1)频域自编码器经过训练后可以直接从时域信号中提取频域特征,无需对原始信号进行傅里叶变换。
(2)与传统自编码器相比,频域自编码器在轴承振动信号中的特征提取能力更强,可以更好地区分不同故障类型的轴承。
(3)频域自编码器方法与其他方法相比具有更好的泛化能力,可以提取轴承故障信号更本质的特征,仅需少量有标签样本训练分类器就可以实现更好的故障分类准确率。
猜你喜欢
电子制作(2018年19期)2018-11-14 02:37:08
成都信息工程大学学报(2018年3期)2018-08-29 01:08:40
雷达学报(2018年3期)2018-07-18 02:41:34
自动化学报(2017年11期)2017-04-04 02:52:58
电子设计工程(2017年20期)2017-02-10 03:39:29
火控雷达技术(2016年1期)2016-02-06 02:17:55
电子器件(2015年5期)2015-12-29 08:42:24
无线电通信技术(2015年3期)2015-12-23 11:37:02
电测与仪表(2015年3期)2015-04-09 11:37:24
噪声与振动控制(2015年4期)2015-01-01 07:08:21