
风浪流载荷下超大型海洋平台双船拆解系统运动特性数值模拟
2021-10-29 06:19刘永泽刘夕全赵鹏飞任少飞
舰船科学技术 2021年9期
刘永泽,刘夕全,赵鹏飞,吕 涛,任少飞
(1. 哈尔滨工程大学 船舶工程学院,黑龙江 哈尔滨 150001;2. 山东海洋蓝鲲运营有限公司,山东 济南 250000;3. 山东海洋工程装备有限公司,山东 青岛 266000)
0 引 言
随着海洋石油工业的发展,越来越多海洋平台被应用于海上油气田的开采生产中,并且海洋平台向着大型化、综合化的方向发展。一般海洋平台的设计寿命为20年左右,未来将有大量超大型海洋平台因达到使用寿命而需要拆解[1]。双船拆解系统是目前最新的超大型海洋平台一体化拆解方法,拆解时一般需要3艘拆解船协同作业,先将海洋平台与2艘拆解船的举升臂固定(2艘拆解船与海洋平台构成双船拆解系统),之后通过调整压载水系统将切割后的海洋平台托起转运到第3艘运输船甲板上,从而大幅度提高拆解的效率和作业安全性[2]。
目前,对海洋平台安装和拆解开展了较为广泛的研究。Hu等[3]针对大型海上平台上部组块浮托安装作业问题,基于数值模拟与模型试验对风浪流耦合载荷下非线性冲击载荷、作业船运动特性进行了研究。李巍等[4]基于模型试验研究了风浪流耦合载荷下双船起重拆解平台及运输环节,验证了双船拆解协同运输平台的可行性。易丛等[5]针对东海海域研究了3条浮托驳船的浮托安装过程,并重点分析了作业中的进退船及对接问题。昝英飞等[6]研究了浮托安装时风浪流载荷下驳船与锚链之间的时域耦合动力学问题,对驳船的运动和锚链顶端拉力进行了分析。王飚等[7]以南海某海洋平台15 000吨级组块动力定位浮托安装为例,分析了浮托安装过程中的关键技术,并对其在东海作业的适用性进行了论证。彭景环[8]基于三维势流理论对多浮体在波浪上的运动耦合响应进行了研究,并对浮托作业过程中双驳船耦合的水动力和波浪力进行了预报。
研究双船海洋平台拆解系统在风浪流载荷下的运动特性,对于保证拆解作业的可行性和安全性具有极其重要的意义。然而,目前针对双船海洋平台拆解系统的研究相对较少,为此本文基于Sesam软件对双船拆解系统在风浪流载荷下的运动特性进行分析。首先采用HydroD模块对双船拆解系统和单个拆解船进行频域计算,得到波浪载荷下双船拆解系统和单个拆解船的运动特性及相关水动力参数,然后将以上计算结果导入Sima模块,求解双船拆解系统和单个拆解船在风浪流载荷下的时域运动特性,重点探讨了双船拆解系统与单个拆解船运动差异,并给出了1~3级海况下双船拆解系统六自由运动短期预报,旨在为双船起重海洋平台拆解作业提供一定的数值参考。
1 双船拆解系统及环境载荷参数
双船拆解系统由2艘拆解船和待拆解海洋平台组成,其中拆解船总长200 m,宽45 m,型深16 m,吃水9.5 m,安装4根举升臂后总排水量约65 000 t,拆解船配备2套首部侧推进器和2套尾部吊舱式全回转推进器,配合DP-3级动力定位系统可实现作业时精准定位。待拆解海洋平台长85 m,宽55 m,高71 m,重约20 000 t,待拆解海洋平台与2艘拆解船组成双船拆解系统后吃水12 m。

图1 双船拆解系统示意图Fig. 1 Schematic diagram of the twin-ship offshore platform dismantling system
海洋平台拆解作业海域为挪威北海,为保证安全需在3级及以下海况下进行拆解作业。因此,采用1~3级海况参数进行计算,得到双船拆解系统在风浪流载荷下的最大运动幅值。采用Jonswap谱描述波浪载荷,NPD谱描述风载荷,具体环境载荷参数见表1[9]。

表1 挪威北海环境载荷参数Tab. 1 Environmental load parameters of the Norway North Sea
2 双船拆解系统运动特性频域分析
对多浮体结构进行水动力分析时可以将其简化为浮体间刚性连接[8],本文将2艘拆解船与海洋平台简化为刚性连接的整体。首先在HydroD模块中对双船拆解系统整体及单个拆解船进行水动力分析,得到波浪载荷下双船拆解系统和单个拆解船六自由度运动响应幅值以及运动传递函数和附加质量等水动力参数。由于双船拆解系统水线以下的部分完全对称,故将浪向角设置为0°~180°,间隔30°,拆解船浪向角设置为0°~360°,间隔30°。根据挪威北海波浪平均周期概率分布[9],设置双船拆解系统作业水深为100 m,波浪周期为0.1~1.1 rad/s。
由于将船首朝向风浪加载方向能显著提高船舶操控性[10],故重点对150°,180°和210°典型工况下的运动特性进行对比分析,计算结果如图3所示。可以看出:在多数情况下,双船拆解系统在波浪载荷下六自由度的运动幅值小于单个拆解船,其中横摇和首摇减小幅度最大,如图3(a)~图3(f)所示;双船拆解系统垂荡、横摇、纵摇及首摇运动幅值随波浪频率变化较大,其中首摇运动幅值会随波浪频率增大在0.3 rad/s和0.7 rad/s附近出现2个峰值,纵摇运动幅值会在波浪频率为0.2 rad/s时急剧增大,如图3(c)~图3(f)所示。
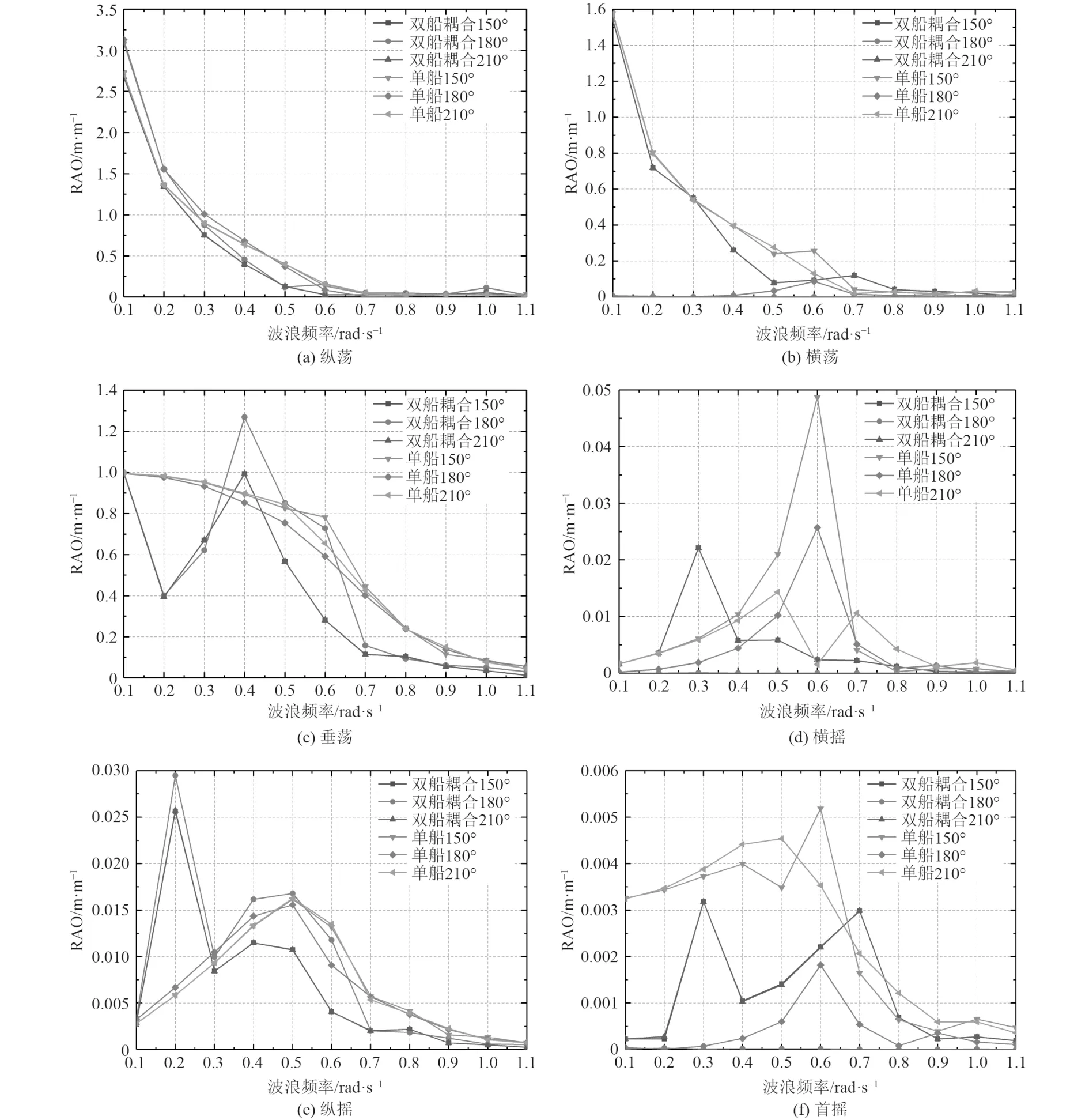
图3 波浪载荷下双船拆解系统和拆解船六自由度运动特性频域计算结果Fig. 3 The 6-DOF motion characteristics of the twin-ship offshore platform dismantling system and dismantling ship under wave predicted by the frequency domain algorithm
3 双船拆解系统运动特性时域分析
将频域计算中得到双船拆解系统和单个拆解船六自由度运动传递函数和附加质量等水动力参数导入至Sima模块中,对双船拆解系统和单个拆解船在3级海况、180°风浪流载荷下的运动特性进行10 800 s的时域模拟。由于纵荡、横荡及首摇运动对拆解作业影响最大[10],故重点对上述3个方向的运动进行分析,计算结果如图4所示。从图中可以看出,双船拆解系统在180°风浪流载荷作用下的横荡和首摇运动远小于单个拆解船,始终接近于0,如图4(b)和图4(c)所示。这主要是因为双船拆解系统结构对称,当风浪流载荷从180°方向加载时双船拆解系统横向的合力和首摇力矩均较小使得运动幅度减小;双船拆解系统的纵荡运动幅度较单个拆解船减小了55.5%,如图4(a)所示。

图4 双船拆解系统和拆解船在180°风浪流载荷方向下时运动时历曲线Fig. 4 The motion-time curves of the twin-ship offshore platform dismantling system and dismantling ship under wind,wave and current load of 180° direction
为进一步探究双船拆解系统纵荡运动幅度较单个拆解船大幅减小的原因,对双船拆解系统和单个拆解船在180°风浪流载荷下的各推进器方位角及推力时历曲线进行比较发现,双船耦合时船尾的全回转推进器方位角始终保持在0°左右,而单船的全回转推进器方位角则会在-160°~10°之间剧烈波动(见图5),进而导致双船耦合后的拆解系统和单船受到的推进器横向合力差异巨大,如图6所示。由于单个拆解船安装4根举升臂破坏了结构的对称性使得其在180°风浪流载荷下横荡和首摇运动幅度较大,所以其动力定位控制系统需要改变船尾的全回转推进器的方位角来修正横荡及首摇偏差,且船首布置的侧推进器无法修正纵荡方向上的位移偏差,造成单个拆解船的纵荡运动幅度较大。双船耦合拆解系统则由于结构对称,横荡和首摇运动幅度小,尾部的全回转推进器能始终保持在0°附近抵抗纵荡方向的位移偏差,使双船耦合拆解系统纵荡运动幅度较小。
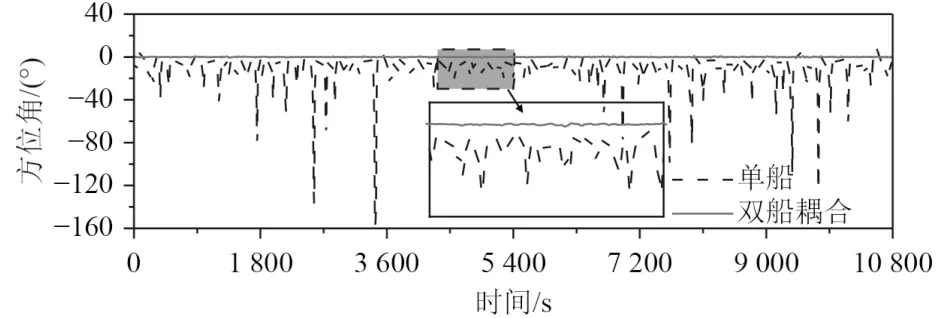
图5 双船拆解系统和拆解船在180°风浪流载荷方向下时全回转推进器方位角时历曲线Fig. 5 The history-time curves of the thuruster azimuth of the twinship offshore platform dismantling system and dismantling ship under wind, wave and current load of 180° direction

图6 双船拆解系统和拆解船在180°风浪流载荷方向下推进器横向合力时历曲线Fig. 6 The history-time curves of the lateral resultant force of the twin-ship offshore platform dismantling system and dismantling ship under wind, wave and current load of 180° direction
由于海洋平台拆解作业所需时间较长且挪威北海风浪方向变化较为频繁[9,11],故对双船拆解系统和单个拆解船在0°~360°(间隔30°)风浪流载荷方向下的运动进行数值模拟,对比双船拆解系统和单个拆解船在不同方向风浪流载荷下的运动差异,计算结果如图7所示。从图中可以看出:双船拆解系统在各方向风浪流载荷下的六自由度运动幅度均小于单个拆解船,如图7(a)~图7(f)所示;当风浪流载荷关于X轴对称时(如图2所示),双船拆解系统的在六自由度上的运动也大致对称,如图7(a)~图7(f)所示;双船拆解平台在180°风浪流载荷下纵荡、横荡及首摇相比其他载荷方向时运动幅度更小,更适合拆解作业,如图7(a)、图7(b)和图7(f)所示。

图2 推进器布置及坐标系规定Fig. 2 Propeller arrangement and the definition of coordinate system

图7 三级海况下双船拆解系统及拆解船六自由度运动幅度Fig. 7 The 6-DOF amplitude of motion for twin-ship offshore platform dismantling system and dismantling ship under sea conditions of Class 3
双船拆解系统在1,2级海况下六自由度运动短期预报如图8所示。从图中可以看出,多数情况下双船拆解系统在1级海况下的运动幅度小于2级海况时,如图8(a)~图8(f)所示。但是,当风浪流载荷方向为90°和270°时双船拆解系统在1级海况下的垂荡和纵摇运动大于2级海况时,这主要是因为1,2级海况在有义波高有差别的同时对应的波浪频率也不同,且双船拆解系统由于水下部分为双体结构,在不同频率波浪载荷下的运动响应幅值有较大差别(见图3),从而造成双船拆解系统在更低等级海况下运动幅度更大,如图8(c)和图8(f)所示。
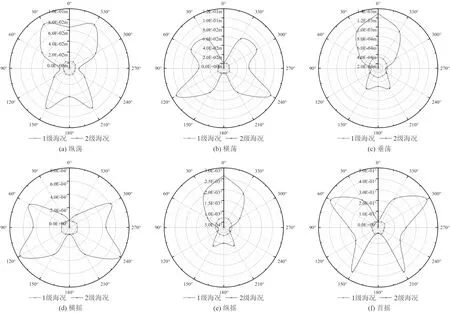
图8 1,2级海况下双船拆解系统六自由度运动幅度短期预报Fig. 8 The short-term prediction of 6-DOF amplitude of motion for twin-ship offshore platform dismantling system under sea conditions of Class 1 and 2
4 结 语
本文以超大型海洋平台双船拆解系统为研究对象,对其进行频域分析后得到波浪载荷下无动力双船拆解系统运动特性,在此基础上进行时域分析研究了动力定位下双船拆解系统在风浪流载荷下的运动特性,重点对比了双船拆解系统与耦合前单个拆解船运动特性的差异,并给出双船拆解系统在1,2,3级海况下运动幅度短期预报。研究结果表明:
1)双船拆解系统在波浪载荷下运动响应普遍小于单个拆解船,由于双船拆解系统结构对称,其在风浪流载荷下横摇及首摇运动远小于单个拆解船,横摇和首摇扰动减小后大部分推力可用来修正纵荡和横荡偏移,从而使双船拆解系统在风浪流载荷下六自由度运动均小于单个拆解船。
2)由于双拆拆解系统水下为双体结构,双船拆解系统的垂荡、纵摇和首摇运动对波浪频率变化更加敏感,造成双船拆解系统在某些有义波高较小海况下垂荡、纵摇及首摇运动幅度反而更大,作业时在考虑有义波高的同时不能忽略波浪频率的影响。
3)双船拆解系统在180°的风浪流载荷下纵荡、横荡及首摇运动幅度相对其他载荷方向时较小,为保证安全应尽量使船首朝向风浪流加载方向进行作业。
猜你喜欢
水上消防(2022年2期)2022-07-22
学苑创造·A版(2022年4期)2022-06-18
舰船科学技术(2022年10期)2022-06-17
兰州交通大学学报(2022年2期)2022-04-26
舰船科学技术(2021年12期)2021-03-29
舰船科学技术(2021年12期)2021-03-29
小雪花·小学生快乐作文(2020年3期)2020-10-13
阅读与作文(小学高年级版)(2020年3期)2020-03-02
当代陕西(2020年24期)2020-02-01
汉语世界(The World of Chinese)(2019年3期)2019-07-01
