
激光通信终端光学收发通道运动学支撑设计
2021-10-28 01:02张缓缓任兰旭宋延松张锦龙李帅
长春理工大学学报(自然科学版) 2021年5期
张缓缓,任兰旭,宋延松,张锦龙,李帅
(西安空间无线电技术研究所,西安 710000)
近年来随着空间技术的快速发展,卫星载荷产生的海量数据在星间/星地的高速传输成为研究的热点。相对于传统的微波、毫米波链路,星间/星地激光链路作为新兴的通信手段,具有带宽大、数据传输速率高、天线尺寸小、抗干扰保密性好的优点,能够以1%的微波天线面积获得高 10~100倍的数据传输[1-2]。
激光通信其中一个特点就是激光光束发散角非常小,通常仅为几十微弧度,双端建链通信相对微波链路较为困难。为保证激光链路成功建立,一是要求激光通信终端初始指向误差较小,二是要求激光通信终端发射光轴和接收光轴的同轴度指标要小于发散角一个数量级[3]。前者可以保证激光通信建链时凝视端对扫描端的光束覆盖,后者保证了双端的相互精确对准,即扫描端接收到凝视端的光信号后可以将光束准确发射回至凝视端接收光轴上,不会出现扫描端回射的光束与凝视端接收光轴有偏差使得凝视端接收到的光能量不足的问题。发射光轴和接收光轴的设计是通过光学收发通道内光学组件分光/合束实现的,光学组件包括分光镜、折轴镜、光学支路和探测器等。而光学收发通道各光学组件在外界因素影响下会发生相应的姿态改变,进而引起各光轴的相对变化,即同轴度误差,包括装配过程中的安装误差和在轨工作时的温度变化等。其中,在轨温度变化导致的同轴度误差可通过设计自标校功能进行在轨校正[4-5],但光学系统设计会相对复杂,如增加标校反射器、标校支路等组件。因此,需要从设计上提高光学收发通道对外界环境的适应性。
本文针对激光通信终端光学收发通道发射和接收光轴同轴度易受外界影响的特点,应用“运动学约束”原理提出了光学收发通道的双脚架支撑系统。理论推导出了双脚架结构释放的四个自由度方向的柔度公式,结合变形和反作用力的关系确定了双脚架的柔性结构参数。应用有限元方法仿真分析了光学收发通道的双脚架支撑系统对温度变化和安装误差的适应性,结果表明在安装误差和温度变化工况下发射和接收光轴同轴度的变化能够满足技术指标要求。
1 激光通信终端的组成
典型的激光通信终端组成原理如图1所示,由粗指向机构、望远镜和光学收发通道三个部分组成。粗指向结构主要完成激光通信终端的大范围两轴指向功能,由轴系、反射镜、结构件和锁紧装置等组成,有潜望式、经纬仪式和摆镜式等结构形式[6-7],其中,潜望式结构转动范围大,惯量小,而经纬仪结构与光学系统耦合度较高;望远镜主要完成激光光束的扩束/缩束功能,有离轴反射式、同轴反射式和透射式几种构型[8-10],相比于同轴反射式结构,离轴具有遮挡小、效率高的优点,但设计和加工难度较大;光学收发通道是激光通信终端的核心部组件,主要完成激光光束的准直发射和接收,一般包含多个光轴系统[11-12]。
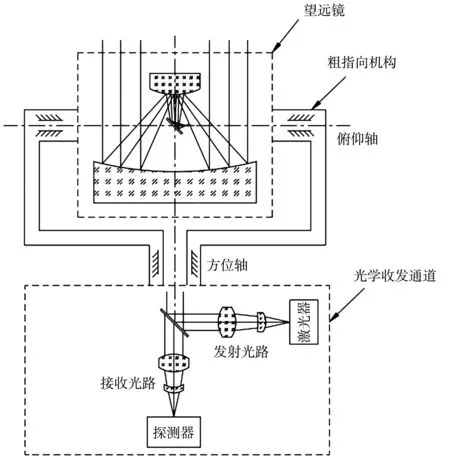
图1 激光通信终端组成示意图
2 光学收发通道支撑结构设计
激光通信终端光学收发通道为复杂的多光轴系统,利用光学组件分光合束的方法实现光束的特定走向。典型的光学收发通道内共有4个光路系统,分别为信标发射、信号发射、信标接收和信号接收光路系统。某项目激光通信终端光学收发通道的布局如图2所示。信号发射系统的光束反射路径包括:信号发射支路、折轴镜1、分光镜2和分光镜3。信标发射系统的光束反射路径包括:信标发射支路、折轴镜2、分光镜1、分光镜2和分光镜3。信号接收系统的光束反射路径包括:折轴镜3和信号接收支路及探测器。信标接收系统的光束反射路径包括:分光镜3、折轴镜4和信标接收支路及探测器。

图2 光学收发通道布局图
为保证激光通信终端在轨建链通信,各光路系统的光轴之间有严格的同轴度要求。以激光终端发散角40 μrad为例,收发光轴同轴度应保证在1″以内。换算到收发通道内部,以信标接收光轴为基准时,其他光路系统的光轴偏差应小于 15″。
2.1 运动学约束
一个物体在空间有六个自由度,即沿三个正交坐标轴的平移和绕三个坐标轴的旋转。若该物体每种可能的运动方式都通过与支座支点的单点接触而被单独的约束,则该物体被运动学约束,如图3所示。若其中一种运动方式被多个支点共同约束,则该物体处于过约束状态,其自身会受到支点施加的外力而产生相应的变形。光学元件/光学系统对外部力产生的变形极为敏感,需要对其进行运动学约束/安装。
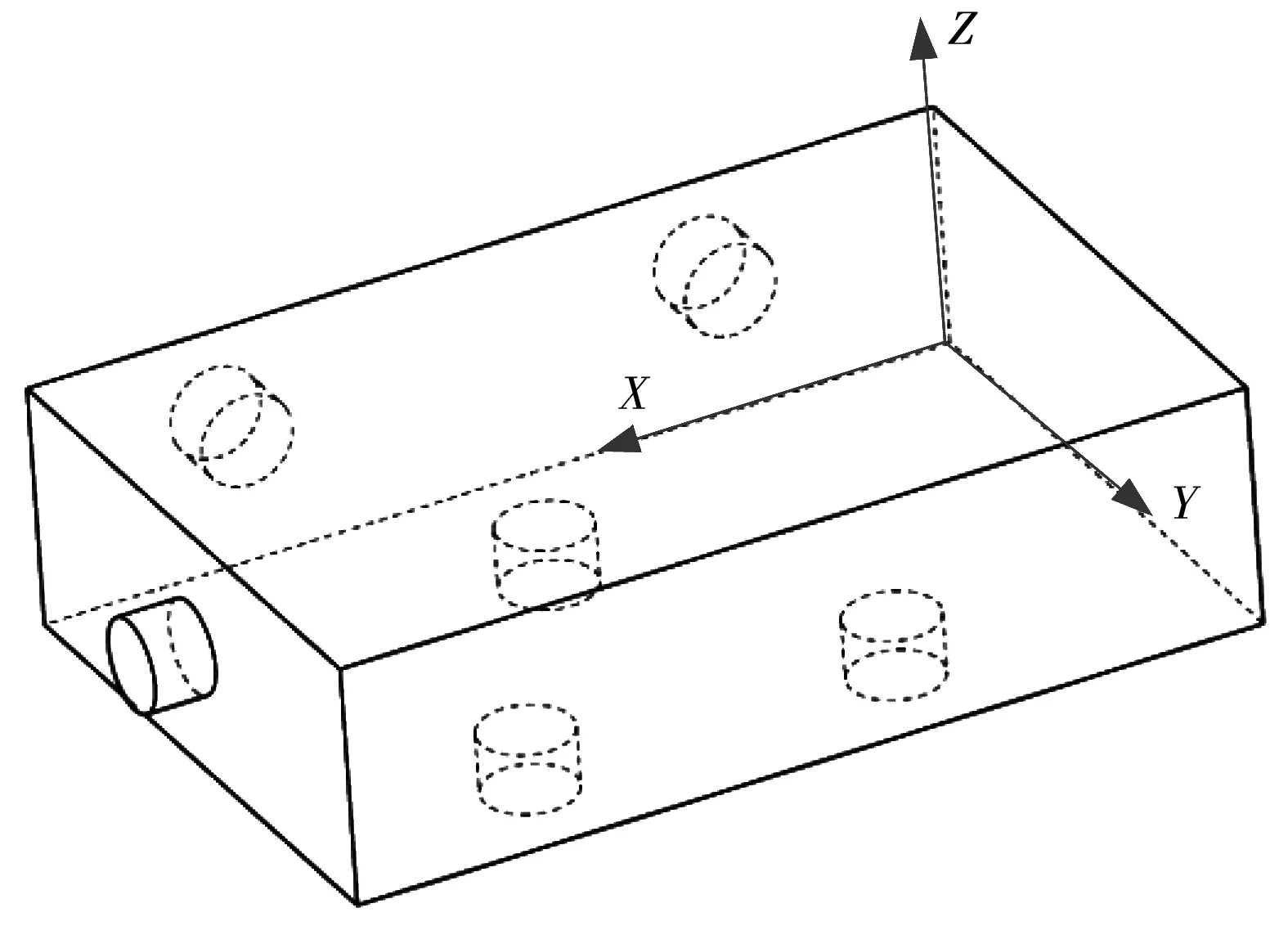
图3 运动学约束示意图
运动学约束原理实际应用时,一般有三种方式,即“1-1-1-1-1-1”、“2-2-2”和“1-2-3”。其中第一种方式的原理图如图3所示,六个支撑点分别约束物体一个方向的自由度,典型应用为Stewart平台及衍生的结构[13-14];第二种方式的原理图如图4所示,共有三个支撑点,每个支撑点均约束物体两个方向的自由度,常见于大型光学元件的支撑和遥感相机在卫星上的整体支撑等[15-17];第三种方式的原理图如图5所示,共有三个支撑点,每个支撑点约束的自由度分别为1、2和3,见于特殊要求的光学元件支撑。

图4 “2-2-2”型运动学约束

图5 “1-2-3”型运动学约束
根据激光通信终端光学收发通道的特点,本文在设计光学收发通道结构的支撑系统时选用“2-2-2”支撑方式。支撑系统由三个双脚架组成,三个双脚架均匀切向分布在光学收发通道壳体周边,如图6所示。图7所示为本文设计的双脚架结构,双脚架两个支腿上分别设置有相同的两个垂直方向的柔性结构。柔性结构的设置能够释放支撑结构多余的约束,使得每个双脚架仅约束光学收发通道两个方向的自由度,释放其余四个方向的自由度,即双脚架支撑系统从原理上满足运动学约束。这种支撑系统的设计可以减小光学收发通道温度变化时由于外部约束导致的热应力及装配过程中由于安装误差导致的装配应力对光学收发通道发射和接收光轴同轴度的影响。

图6 光学收发通道结构

图7 双脚架结构示意图
2.2 双脚架结构设计
双脚架上设置的柔性结构可被等效为会发生微小变形的悬臂梁,如图8所示。悬臂梁的一端固定,另一端自由,自由端施加受到的载荷Fx、Fy和力矩Mz,则自由端的变形为:
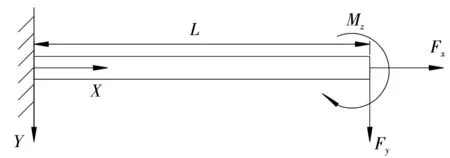
图8 柔性结构等效悬臂梁受力示意图

式中,θz为绕Z轴的转角;Δy为沿Y轴的位移;Cij为结构柔度。
根据 Castigliano理论在梁结构上应用[18],可知:


综合式(1)-式(3),可得到悬臂梁各方向的柔度分别为:

双脚架设计的关键结构参数主要有两支腿角度、柔性结构形状参数及位置等,具体定义如图9所示。

图9 双脚架结构参数
应用公式(4),并结合结构变形协调条件,可以推导得到双脚架释放的四个自由度方向的柔度公式分别为:

其中,CZ、CθX、CθY、CθZ分别为双脚架沿Z轴、绕X轴、Y轴和Z轴方向的柔度。

β1-β4为截面矩系数,与b/h有关,查表可得。
选取航天常用的钛合金材料作为双脚架的材料,根据双脚架柔度公式,结合有限元分析得到的双脚架变形与受到的反作用力的关系,确定了某型号激光通信终端光学收发通道双脚架关键结构参数,对计算结果进行取整,结果如表1所示。
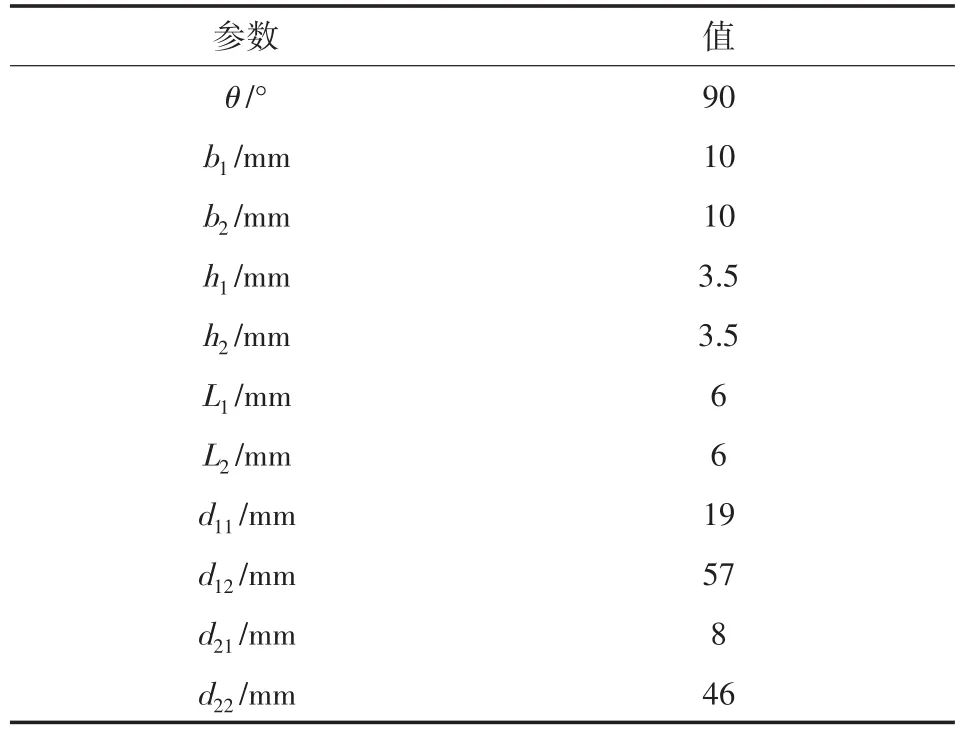
表1 双脚架结构参数
3 有限元仿真分析
对设计完成的激光通信终端光学收发通道进行了有限元仿真:模型采用六面体网格,用刚性耦合连接等效螺钉安装,在收发通道壳体底面中心建立全局坐标系,在分光镜、折轴镜反射面中心和各光学支路的前端面中心分别设置局部坐标系,通过变形后的节点位移拟合和坐标系变换可以得到各组件在其局部坐标系下的角度变化值,进而计算可得各光路系统的光轴变化。分别仿真了温度变化和装配安装误差工况下收发通道同轴度的变化情况。
光学收发通道中光学元件选用熔融石英,光学元件结构选用铝合金,壳体和双脚架选用钛合金,材料参数如表2所示。

表2 材料性能参数
3.1 温度变化工况
温度变化量设置为4℃,为激光通信终端热控设计能够保证的在轨工作温度范围。光学收发通道4℃变化下的变形云图如图10所示。将位移变化结果去除光学收发通道整体倾斜量,再通过数据拟合得到了各个光学组件的角度变化量,如表3所示,进而可得到各个光路系统光轴的方位角和俯仰角变化结果,如表4所示。由表4的计算结果可以看出:以信标接收光路系统光轴为基准,其余光路系统光轴均发生了不同的变化,且俯仰角变化量大于方位角变化量,合成最大角度变化量为7.69″,小于同轴度指标要求。

图10 光学收发通道在4℃温升工况下的位移云图

表3 4℃温升工况下光学收发通道各组件的角度变化
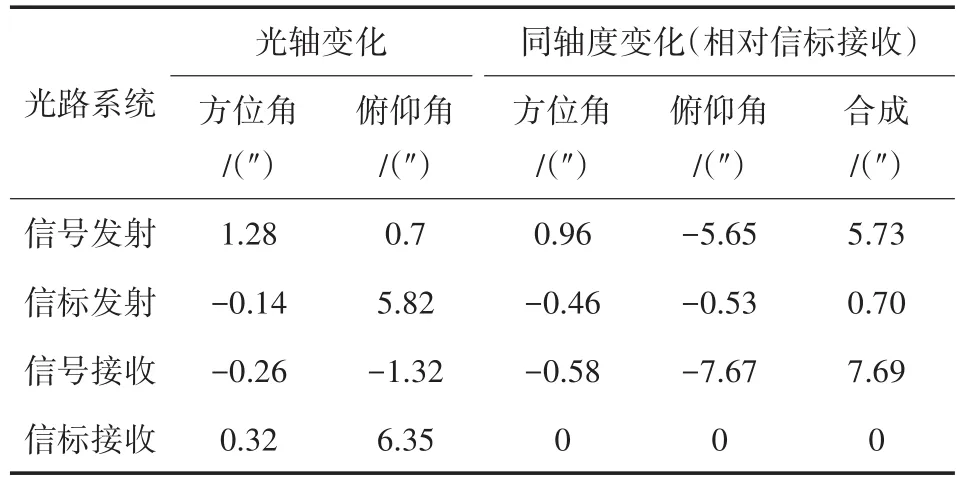
表4 4℃温升工况下光学收发通道光路系统光轴变化
3.2 装配安装误差工况
光学收发通道装配时会由于安装面加工误差受到安装应力的影响,安装误差的大小取实际加工达到的加工精度,为0.05 mm。光学收发通道双脚架支撑系统在空间成120°对称分布,但内部的光学布局非对称分布。因此,分析了三个双脚架分别有安装误差时各个光路系统光轴的方位角和俯仰角变化结果,如图11所示。其中1#、2#和3#的按照图中模型视角方向的上、左、右顺序定义。表5-表7分别为三种安装误差工况下光轴变化的计算结果,可以看出:双脚架可以非常好的适应安装误差对各光路系统光轴变化的影响,以信标接收光路系统光轴为基准,其余光路系统光轴发生较小的变化,合成最大角度仅为1.15″,远小于同轴度指标要求。
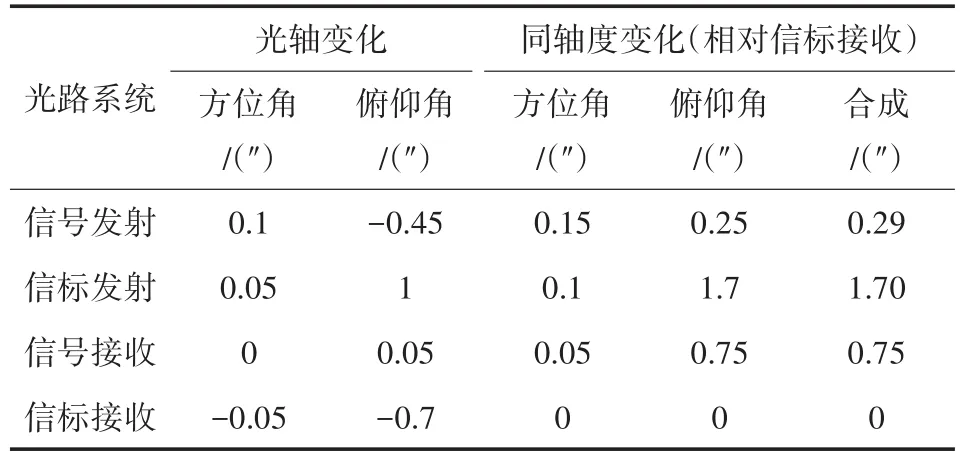
表5 1#双脚架0.05 mm安装误差工况下光学收发通道光路系统光轴变化

表6 2#双脚架0.05 mm安装误差工况下光学收发通道光路系统光轴变化
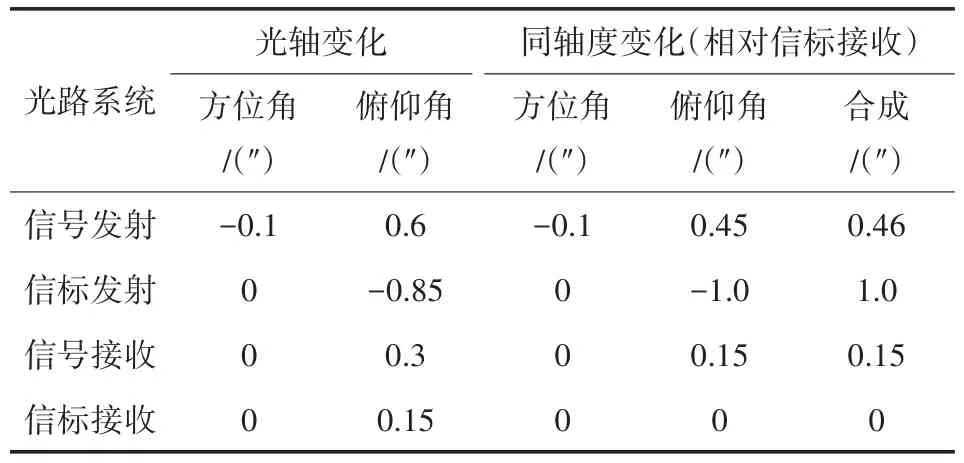
表7 3#双脚架0.05 mm安装误差工况下光学收发通道光路系统光轴变化

图11 双脚架0.05 mm安装误差工况下光学收发通道位移云图
3.3 对比分析
分析了收发通道常用的法兰式安装方式在4℃温升条件下的变形,位移云图如图12所示。表8为光轴变化的计算结果,可以看出:由于法兰安装方式无径向变形能力,无法释放由于温度变化导致的收发通道在径向方向的变形,使得收发通道内各光学元件发生了较大的角度变化,即收发光轴同轴度恶化。以信标接收光路系统光轴为基准,其余光路系统光轴均发生了不同程度的变化,且俯仰角变化量大于方位角变化量,合成最大角度变化量为26.81″,远大于收发光轴同轴度指标要求。

图12 法兰式光学收发通道在4℃温升工况下的位移云图

表8 4℃温升工况下法兰式光学收发通道各组件的角度变化
4 结论
光学收发通道一个复杂的多光轴系统,其发射和接收光轴同轴度是制约激光通信终端建链通信的关键指标,但同轴度指标易受装配时的安装误差和在轨温度环境变化的影响。本文设计了光学收发通道双脚架支撑系统,每个双脚架约束两个方向的自由度,可以满足“运动学约束”原理。依据Castigliano理论推导出了双脚架结构释放的四个自由度方向的柔度公式,得到了各方向的柔度与柔性结构结构参数的关系,确定了某激光通信终端双脚架的关键参数b1、b2、h1和h2等。应用有限元方法仿真分析了光学收发通道在安装误差和温度变化工况下发射和接收光轴同轴度的变化情况:温度变化4℃时,其余各光轴相对于信标接收光路系统光轴的同轴度最大变化为7.69″;安装误差为0.05 mm时,其余各光轴相对于信标接收光路系统光轴的同轴度最大变化为1.15″。结果表明安装误差和温度变化工况下,发射和接收光轴同轴度的变化量满足优于15″的指标要求,即光学收发通道的双脚架支撑系统能够很好的适应安装误差和温度变化。同时,对比分析了法兰式收发通道在4℃温升工况下收发光轴同轴度的变化:法兰安装方式无法释放温度变化导致的结构变形,收发光轴同轴度变化量为26.81″,大于指标要求。
猜你喜欢
宇航计测技术(2022年4期)2022-09-07
九江学院学报(自然科学版)(2022年2期)2022-07-02
汽车实用技术(2022年10期)2022-06-09
初中生学习指导·中考版(2022年4期)2022-05-12
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16
家庭影院技术(2021年3期)2021-05-21
少年文艺·开心阅读作文(2020年11期)2020-11-30
核桃源(2020年5期)2020-11-18
学校教育研究(2019年2期)2019-09-22
Coco薇(2017年7期)2017-07-21
