
平整冰层中海工结构冰载荷研究方法综述
2021-10-27 08:31:48余朝歌田于逵王纬波
中国舰船研究 2021年5期
余朝歌,田于逵,王纬波
中国船舶科学研究中心,江苏 无锡 214082
0 引 言
随着全球气候变暖,北极冰层逐渐融化,北极油气资源开采活动日益增多。在极地,用于油气开采的钻探平台、生产平台及储运船等多种海工结构在作业时常面临着海冰碰撞的危险。为使各类海工结构都能适应冰区作业任务要求,保证它们在冰区作业时的安全性,必须开展冰区海工抗冰结构设计研究。而结构冰载荷是海工抗冰结构强化设计的重要输入条件,因此,研究结构冰载荷就变得尤为重要。
海工结构冰载荷是海冰与海工结构相互作用时产生的一种特殊载荷形式,结构冰载荷的大小受作业海域环境、海冰特性和平台结构特点等多种因素的影响。一方面,海冰的力学特性复杂,宏观形态多变,冰山、平整冰与浮冰是常见的海冰类型,其中冰山撞击对海工结构来说是致命的,故海工结构常常会避开冰山存在的海域。因此,浮冰与平整冰成为海工结构经常遭遇的冰类型。相较于浮冰,平整冰层与结构的相互作用较为复杂且在特定工况下会引起冰激振动现象,对结构的危害性较大。另一方面,海冰与不同海工结构发生作用时的物理过程及失效模式不同。冰层失效模式多变,海冰力学特性复杂,这均使得海工结构冰载荷研究变得较为困难。总的来说,分析冰层与结构相互作用的机理,确定冰载荷大小是冰区海工领域研究的重点。
目前,海工结构冰载荷研究方法主要有3 种:基于冰与结构相互作用机理和模型或实尺度试验数据分析的公式估算方法、模型或实尺度试验测量方法,以及基于冰与结构相互作用过程和冰本构模型的数值计算方法。其中,公式估算方法和数值计算方法需要冰力学特性的输入。针对海工结构冰载荷研究的需要,本文将以冰的结构和物理力学特性的角度,综合分析平整冰与海工结构物相互作用的物理力学过程,简要梳理国内外冰载荷研究方法与进展。
1 平整海冰冰层物理力学特性
海冰是一种复杂的多晶体材料,其力学特性通常与海冰的孔隙率(取决于海冰内海水体积,即卤水体积和气体含量)、海冰盐度、海冰种类、晶体结构以及温度等因素有关。因此,在研究海冰力学特性之前,需要清楚地了解海冰相图(各化学成分比重)、海冰晶体结构等海冰物理特性。
1.1 平整海冰冰层强度的物理基础
20 世纪50 年代,加拿大和美国为了解决北极船舶的补给问题,加强了对海冰的研究。随着人类在南、北极的活动变得日益频繁,各国开始重视海冰问题[1],因此,已有很多学者针对海冰特性进行了研究。例如,Weeks[2]和Zubov[3]针对海冰特性做了大量的工作并给出了详细报告。对于海冰相图,Assur 和Anderson[4-5]给出了不同温度下海冰中卤水、纯冰和固体盐的比重,并指出了各固体盐的析出温度。从宏观角度来说,卤水体积和海冰内气体的含量直接影响着海冰强度等力学特性。
从微观角度来说,海冰微观结构决定着其物理力学特性[6],如冰晶的分布、大小及形状。海冰存在多种晶体结构,其中Ih 型冰晶是自然界中最为常见的结构形式。从单晶结构到海冰形成是一个复杂的过程,按照冰的生长过程,海冰大致可分为初生冰和次生冰2 种[7]。当海面空气温度过低时,海水受空气的影响,液面开始形成较薄的冰层,在这一层,水分子形成纯冰晶体(盐分子被赶到下层海水)。随着时间的推移,海面会形成一个连续的固体颗粒冰层,新形成的冰层具有随机层列的冰晶晶轴,因此是各向同性的。初生冰会形成几厘米厚的粒状冰原,随着时间的推移,海冰继续向下生长,然后形成所谓的次生冰。次生冰大致可分为2 层:初生冰下的过渡层和过渡层下的柱状层。其中,柱状冰层具有各向异性的特点。另外,由于不同海域的环境不同,海冰的生长年龄和形态也大不相同[8]。复杂的晶体结构、多变的宏观形态造成了海冰研究的困难性。
1.2 平整海冰冰层力学性质与力学行为
准确获得海冰的力学性质是海冰研究的一般目的,常包括弹性模量、拉伸强度、压缩强度、弯曲强度等各种力学参数以及海冰的延性、脆性、蠕变等力学行为。从上世纪开始,大批研究人员对海冰抗拉强度、抗压强度、弹性模量等力学参数进行了实测研究并给出了可靠的试验方法[9]。
拉伸强度的测量方法主要包括环状拉伸试验法和直接拉伸试验法2 种。其中,环状拉伸试验因其对海冰温度、盐度、深度和微观结构的敏感性较高而被广泛应用,此外,试样易于钻取,试验操作简单也是其一大优点。Butkovich[10]和Frankenstein[11]将环状拉伸法应用到实际海冰测量中,发现海冰的抗拉强度与海冰温度和卤水体积有关。相比环状拉伸试验,很少有学者对直接拉伸试验进行研究。Sinha[12]和Cox 等[13]利用直接拉伸试验对应变率为10−5s−1和10−3s−1的海冰的拉伸强度进行了研究,试验发现,海冰平均抗拉强度对应变率和温度的敏感性不高。2010 年,Timco和Weeks[14]在其研究中忽略应变率的影响,将海冰的抗拉强度表示为了海冰孔隙率的函数。海冰的弯曲强度是圆锥、斜面等有曲率结构与冰相互作用时需要重点考虑的参数,在上世纪中期,常见的弯曲强度测量方法有小型梁试验法和原位悬臂梁试验法。Butkovich[9]是首批开展小型梁试验的研究人员,并公开发表了一些研究成果。试验时,其选取水平冰样和竖直冰样分别进行加载,发现竖直试样的抗拉强度值远高于水平试样,体现出了海冰的各向异性,但未发现海冰弯曲强度与卤水体积的依赖关系。虽然当时针对小型梁弯曲试验的研究很多,但很少有人考虑试验前海冰卤水析出的影响,而原位悬臂梁试验则可以较好地解决海冰卤水析出的问题。Weeks 和Anderson[15]是为数不多的对原位悬臂梁试验进行广泛研究的学者,他们对厚度小于40 cm 的海冰做了208 次试验,分析了弯曲强度与海冰盐度和温度的关系。Timco 和Weeks[14]在2010 年的一篇报告中提到了上、下不同方向加载对海冰强度的影响(海冰上层强度高,下层强度低),并给出了弯曲强度与卤水体积的函数关系式。当海冰与直立结构相互作用时,海冰的抗压强度变得至关重要。早期,美国的压缩试验采用的是直径3 ft、高径比为3∶1 的圆柱试样,而俄罗斯则多选取立方体试样,这也是当时不同国家研究给出的压缩强度值存在差异的主要原因。大量的学者们经过几十年的研究,普遍认为海冰抗压强度主要与试验加载速率及冰内卤水体积相关。
弹性模量的测量方法主要包括静态测量和动态测量2 种,其中静态测量主要是基于试验的应力−应变关系曲线给出海冰弹性模量值,动态测量则主要根据平面波/剪切波在冰层的传播速度来计算冰层的弹性模量。与结构作用的冰层经常会遇到组合应力的情况,例如拉伸和压缩应力或剪切应力的组合作用。在大多数抗剪强度试验中会出现其他的破坏形式,这就使得抗剪强度试验变得相对困难。事实上,当涉及工程问题时,海冰的抗剪强度并不常用,因为在抗剪破坏之前往往会先发生抗拉破坏。
除海冰力学参数外,海冰的力学行为也是冰载荷研究中重点关注的问题。海冰的力学行为主要包括延性行为、延性到脆性的过渡行为、脆性行为。在较低的应变率下,海冰表现为延性,随着应变率的增加,海冰失效应力将达到峰值,当应变率继续增加时,海冰就会表现出脆性行为[16],如图1 所示(图中, ε˙为海冰的应变率)。在冰与结构相互作用时,冰的密度、弹性模量、弯曲强度和压缩强度等都是海工结构冰载荷计算的重要输入条件。因此,在研究海洋结构冰载荷之前,需要对冰的物理力学特性进行大量的测试与校核。
2 平整冰层与海工结构作用过程及海冰失效模式
冰层与海洋结构的作用是一个复杂的过程,其作用形式与海冰特性、结构形状等许多因素有关。在固定冰况下,冰载荷的大小常与结构类型有关。常见的海工平台抗冰结构有2 种:一种是直立结构,包括圆柱体或其他垂直多面体结构;另一种是斜面结构(多为海工结构的保护装置),包括锥体结构。平整冰与直立刚性结构相互作用时,其破坏模式与冰和结构的性质以及具体工况参数,如冰层挤压速度、纵横比(结构宽度与冰层厚度之比)有关[17],如图2 所示。图中:V为冰层挤压速度;D为结构迎冰面宽度;H为冰层厚度;c,s,r,m,b 分别代表纯挤压破碎、挤压破碎并伴随剥落、挤压破碎并伴随径向裂纹、挤压破碎并伴随径向和环向裂纹,以及屈曲失效。对于小块冰层,当冰与结构相互作用面的裂缝扩展到冰层自由边界时,冰层会发生劈裂破坏。对于大而薄的冰层,屈曲破坏是一种常见的现象,其结果是在靠近结构的冰层中形成环向裂纹。

图2 冰层与直立结构相互作用失效模式图[18]Fig. 2 Failure mode of ice-vertical structure interaction
当较厚的冰层作用于相对刚性的结构上时,根据不同的工况,冰层会发生蠕变失效和挤压破碎。其中,当冰层发生挤压破碎时,碎冰片的剥落会引起结构与冰层局部接触而造成载荷高压区,通常,高压区沿结构宽度方向随机分布在冰层与结构接触面的水平中线位置。另外,当冰层与柔性(刚度较小)直立结构作用时,会引起结构振动,即冰激振动现象,该现象[18]常见于冰层的挤压破碎模式中,一般包括间歇破碎(intermittent crushing,ICR)、频率锁定(frequency lock-in,FLI)和连续脆性破碎(continuous brittle crushing,CBR),也即岳前进等[19]所述的准静态振动、稳态振动及随机振动。
相较于直立结构,斜面结构与平整冰层作用的过程更复杂[20-21]。冰层在与锥体等斜面结构相互作用时,会因受到结构的上抬作用而发生弯曲断裂,进而使碎冰滑移、堆积,如图3所示。
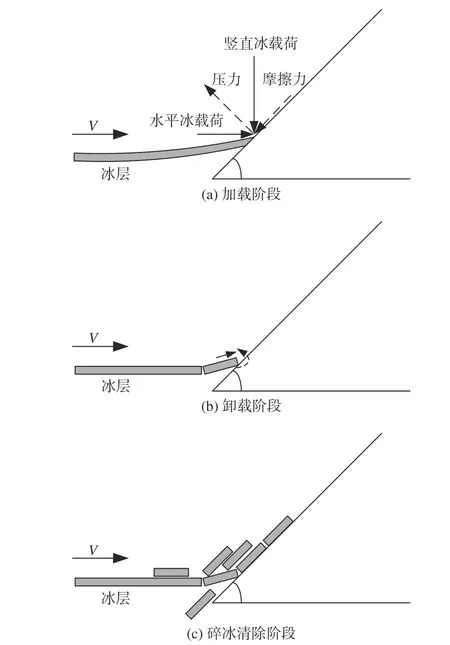
图3 冰层与斜面结构作用的物理过程[21]Fig. 3 The physical process of ice-slope structure interaction
冰层与斜面结构相互作用时会经历断裂、上爬和翻转3 个阶段,在每个阶段中冰载荷的特征都各不相同,冰载荷会表现出明显的周期性作用特征。这样的载荷作用形式在某一条件下,如作用频率与结构自振频率相当时会使结构振动,从而产生冰激结构振动现象。大部分学者着重于对直立结构冰激振动的研究,而对锥体结构冰激振动现象的研究较少[22]。从目前来看,海洋平台冰载荷的大小与海洋平台结构形状、海冰强度和力学行为,特别是冰层的失效模式有关。不同的冰载荷研究方法都是建立在冰与结构物作用的物理过程的基础上的。
3 海工结构冰载荷研究方法
3.1 公式估算方法
研究者们在海冰与结构作用原理以及各种力学模型的基础上,总结出了一些可用于计算冰与结构作用时结构冰载荷的理论模型。在理论模型的基础上,各国依据各自海域的海冰特性,编写了冰载荷规范,用于指导生产设计。
3.1.1 直立海工结构冰载荷估算公式
平整冰环境下直立结构上的冰载荷是各国研究人员重点研究的方向。大多数直立结构冰载荷计算公式都是采用海冰强度乘以投影接触面积的形式。例如,Korzhavin[23]于1962 年提出了一个平整冰区直立结构总体冰载荷计算经验公式:

式中:F为直立结构总体冰载荷;I为局部挤压系数,窄结构取I=2.5,宽结构取I=1;m为结构形状系数,圆柱时取m=0.9,方形取m=1;K为接触条件系数,约0.4~0.7;D和H分别为结构宽度(迎冰面宽度)与冰层厚度; σc为 海冰单轴抗压强度;V为冰速;V0为参考冰速。可见,此经验公式需要已知海冰的单轴抗压强度。
ISO 19906 规范[24]根据库克湾、波弗特海、波罗的海和渤海的实尺度试验测量数据,给出了直立桩柱结构前的平均有效冰载荷:

式中:pG为结构平均有效冰载荷,由总体冰载荷除以名义接触面积得到;CR为海冰强度系数,北极地区取2.8 MPa,亚北极地区取2.4 MPa,温带取1.8 MPa;h1为参考冰厚; β为接触宽度效应的经验系数,取值为−0.16;n为冰厚效应的经验系数,当冰厚小于1 m 时,取−0.5+H/5,当冰厚大于1 m 时,取−0.5。
除上述公式外,对于直立结构冰载荷计算,还有美国的API 规范[25]、加拿大的灯塔规范[26]、中国海海冰条件及应用规定[27]以及法国船级社给出的计算方法[8]等。
3.1.2 斜面海工结构冰载荷估算公式
相较于直立结构挤压冰载荷的计算方法,斜面结构冰载荷的计算较为复杂,可以分为二维模型和三维模型[28-29],如Croasdale[30]的二维理论等,Croasdale 等[31]的三维理论、Ralston[32]的三维模型、Frederking[33]的三维模型等。斜面结构与冰层的作用是一个复杂的过程,倾斜结构会使冰层向上或向下偏转,从而使冰层失效,由此产生的冰载荷既有垂直分量,也有水平分量,如图4 所示。图中, α为斜面结构倾角,N为冰层对结构的正压力, µN为斜面与冰层间的摩擦力,FH和FV分别为斜面结构的水平冰载荷和竖直冰载荷。
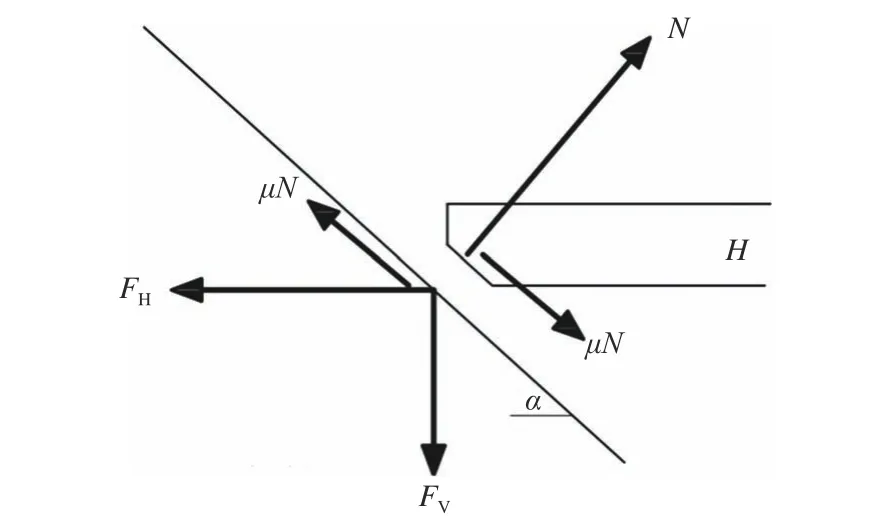
图4 斜面结构与平整冰层作用时的受力示意图[24]Fig. 4 Schematic diagram of the force on the slope structure interacting with level ice
ISO 19906 规 范[24]基 于Croasdale 等[31]的 三 维理论和Ralston[32]的理论模型,给出了斜面结构冰载荷的2 种计算方法。对于斜面结构水平方向的冰载荷,通常只考虑破碎分量而忽略上爬分量。基于Ralston[32]的理论分析方法给出的总体水平冰载荷的破碎分量HB如下所示:

ISO 19 906 规范[24]基于Croasdale 模型,给出的结构总体水平冰载荷FH为:


式中:HP为破碎冰块对冰层前进的阻力;HR为将冰层推上斜面的力;HL为破碎冰块对冰层的压力;HT为破碎冰块的旋转力;E为海冰弹性模量;υ为海冰泊松比; ρw为海水密度;LC为冰的特征长度;hr为 碎 冰 堆 积 高 度; µi为 冰 之 间 的 摩 擦 系 数;e为碎冰块的孔隙率;θ 为碎冰块与水平方向的夹角;c为碎冰的凝聚力; ϕ为碎冰之间的摩擦角。
3.1.3 小 结
综上所述,不少研究机构都给出了海工结构冰载荷的估算公式。有学者还对一些冰载荷计算公式进行了比较分析,发现不同公式的计算结果存在差异且不少公式的计算结果与试验数据相差较大[34-35]。例如,法国船级社有关结构载荷的计算方法是针对南北极海域制定的,中国的海冰条件及应用规定只适用于渤海海冰与较窄的海工结构,而ISO 19906 规范则综合了全球海域海冰的特点。随着研究者对海冰与海工结构作用机理的深入了解,有机构提出了新的结构冰载荷计算方法,例如德国提出的EAU 2012 规范[36];也有机构基于大量的试验测量数据对原有计算公式进行了对标与修正,如参考ISO 19906 规范于2016 年提出的DNVGL-ST-0437 冰载荷计算规范[37]。
3.2 冰载荷试验测量方法
3.2.1 冰载荷实尺度试验测量方法
基于实尺度试验测量的结构冰载荷较为可靠,可为公式估算和数值计算提供参考。在实尺度试验中,海工结构冰载荷一般可通过测力传感器直接测量获取,也可通过平台结构响应与变形以及损伤状态反演计算获取。在结构物冰载荷的测量过程中,传感器受到外力作用时弹性体会发生变形或响应运动,从而导致电阻值变化,再经过转换电路变成电压等信号输出,即可得到结构冰载荷。
国外针对于海工结构冰载荷的试验研究起步较早,早在上世纪国外就开展了大量冰载荷实尺度测量试验。1984 年,加拿大Klohn 设计公司的Jefferies 等[38]在北极Molikpaq 平台上安装了500个传感器和高速摄录像系统,其除了监视平台结构的冰载荷外,还同时获取平台的运动、基础压力和动态响应数据,然后通过传感器数据反演计算获得结构总体载荷。采用该方法,加拿大对在波伏特海域作业的海洋平台开展了大量平台总体冰载荷测量统计研究工作,并于1991 年在美国OTC 会议上由Masterson 等[39]作了报告。为了解海洋工程结构与海冰作用时的载荷分布,进一步优化结构设计方案,Jefferies 等[40]对Molikpaq 平台上的冰载荷测量数据进行了分析。Molikpaq 平台上安装有2 种结构局部冰载荷测量装置,一种是Medof 传感器,另一种是09 型结构应变采集传感器。根据1984 年对Molikpaq 平台的监视情况,发现冰与平台结构相互作用的频率为4 Hz。由于Medof 传感器大约每隔6~10 s 才可以测量一次数据,很难捕捉到有效的数据量,因此当冰载荷与结构物的作用频率较高时,主要采用09 型结构应变采集传感器反演获取结构冰载荷。在处理结构冰载荷数据时,将09 型结构应变采集传感器的反演结果与Medof 传感器的测量结果进行对比,以校核优化冰载荷数据[41]。
除Molikpaq 平 台 外,Norströmsgrund 灯 塔[42]也备受研究者的关注,在上世纪70 年代就有了关于该灯塔受冰层撞击产生较大冰载荷的报道。1986 年,国外针对灯塔冰载荷问题开展研究,并在灯塔上安装了大量载荷测量仪器。后又于1998 年加装了加速度传感器和可覆盖灯塔半个圆周的压力面板,如图5 所示。从仪器加装至2003 年,每年冬季研究者都会对灯塔冰载荷进行测量分析。据Schwarz 的报道,当时灯塔最大的平均有效冰载荷可达到1.4 MPa,严重影响了Norströmsgrund 灯塔的安全性。

图5 Norströmsgrund 灯塔及压力板示意图[43]Fig. 5 Schematic diagram of load panels on Norströmsgrund lighthouse
2008~2010 年间,Frederking等[44]针对加拿大联邦大桥与海冰的相互作用进行了监测,其通过在23 和24 号桥墩安装应变测量仪器与录像系统,获得了桥墩响应数据和桥墩附近的冰况,进而反演得到了桥墩所受载荷。反演得到的载荷数据包括冰载荷及风载荷数据,而较为遗憾的是,23 和24 号桥墩当时没有配置风速测量仪器,因而只能参考大桥附近桥墩的风速数据进行载荷修正。最终,试验观察到了冰层的多种失效模式以及23 和24 号桥墩的极限冰载荷数据。
国内在结构冰载荷实尺度测量方面,鉴于条件的限制,主要对渤海辽东湾油田的海工平台在冬季的冰载荷测量工作予以了关注。2003 年,大连理工大学的岳前进等[22]利用渤海辽东湾JZ20-2油田的MUQ 与MNW 平台建立了比较完备的冰力测量系统,获得了冰载荷与冰激振动数据。该测量系统主要通过在锥体上方安装摄像头,利用计算机对图像信息进行处理来获得比较准确的冰与锥体作用的破碎过程、尺寸及冰厚、冰速等信息。其在锥面上安装了冰压力传感器,用于直接测量平台桩腿结构表面冰压的时程变化;在平台上布置了多个低频性能较好的拾振器,用于测量平台的振动响应。在试验中,观察到了冰力有明显的周期性特征,以及结构的动响应现象。通过对试验测量结果的分析,研究了平台振动幅值随冰速的变化趋势,解释了平台结构振动加剧发生的“共振”现象,进一步提出了冰力函数模型,并对其中参数的适用性与确定方法进行了分析。2004 年,岳前进等[19]又基于自主开发的冰载荷测量系统,对柔性直立结构前冰层挤压失效模式下的冰载荷进行了测量研究,从现场试验过程中发现了冰层的失效模式与挤压速度相关,提出冰层随挤压速度变化会发生塑性破坏、裂纹损伤破坏与纯脆性破坏这3 种破坏模式,进而会引起结构准静态振动、稳态振动以及随机振动的结论。此次试验使国内研究者对冰激振动有了定性的了解。由于冰激振动机理较为复杂,对于冰层不同类型的冰激振动现象,还需研究者进行深入研究。
3.2.2 冰载荷模型试验测量方法
相较于在实尺度下获取海洋平台的冰载荷,通过开展冰水池试验获取模型结构的冰载荷是一种比较方便的手段。为便于试验结果的外推和应用,冰水池试验对象(模型)与(冰)环境条件均应遵循一定的相似性要求。理论上,要保证模型试验的准确性,需要模型系统与原型系统在几何、运动和动力这3 个方面都相似[45-47]。根据测量技术的不同,结构冰载荷模型试验又可以分为静冰载荷模型试验和动冰载荷模型试验。静冰载荷主要是指冰与结构发生作用时产生的载荷极值,用于研究结构承载的极限情况。这类冰载荷模型试验主要保证结构与冰的强度相,必要时,可以允许一定自由度的约束。而进行动冰载荷测量时,需要考虑结构自身的响应问题,且结构自振与动力学相似问题是模型试验准备时需要考虑的重要问题。目前而言,静冰载荷模型试验主要满足弗劳德数Fr、柯西数Ca相等即可;而动冰载荷模型试验尚无适用性的相似律,因此动冰载荷模型试验侧重于冰层与结构作用过程的相似,多用于冰激振动机理研究,难以准确预报结构冰载荷。
1) 静冰载荷模型试验测量技术。
静冰载荷模型试验一般通过各种类型的测力天平和触觉式传感器来测量模型总体与局部的冰载荷。总体冰载荷的试验测量装置如图6 所示,测力传感器一端固定于试验模型,另一端固定于拖车刚性拖曳臂。在试验过程中,试验模型与测力传感器刚性连接,并由拖车拖曳支撑杆以及试验模型在冰水池中匀速前进。传感器记录结构与冰作用过程中的冰载荷数据。结构局部冰载荷与总体冰载荷试验相似,模型与拖车刚性连接,将触觉式传感器固定于结构−冰层作用位置,以保证冰层与结构相对运动,触觉式传感器用于记录冰载荷数据。

图6 静冰载荷模型试验测量装置Fig. 6 Measuring device of model test for static ice load
国外针对海工结构静冰载荷开展了大量研究。1992 年,Lindholm 等[48]针对中国渤海湾的沉箱平台进行了模型试验,相似比为1∶20,主要分析了结构在平整冰下所受的总体冰载荷以及碎冰堆积现象。Barker 等[49]和Gravesen 等[50]针对单桩式风机基础结构中的破冰锥体设计,以及对于周期性总体冰载荷的响应,开展了冰水池模型试验,其通过传感器测量锥台结构的冰载荷时程曲线,开展了破冰锥结构的优化设计工作。近年来,触觉式传感器被广泛应用于海工平台结构局部冰载荷的模型试验测量。1998 年,日本学者Sodhi等[51-52]首次将触觉式传感器用于碰撞嵌入模型试验,研究了冰与直立结构作用下冰的失效模式与作用速度、圆柱直径尺寸/冰厚的相关关系。触觉式传感器同时还被用来测量冰与直立结构相互作用时冰载荷作用的面积。经试验发现,在整个测量量程范围内,载荷的测量精度不一致。测量载荷值与作用区域相关,同一总体作用力施加于不同作用面积上获取的载荷量值不同。基于触觉式传感器测量得到的总体冰载荷仅为测力天平测量值的一半。2014 年,Lu 等[53]采用触觉式传感器对较宽斜面结构与水平冰层作用时局部冰载荷的时空分布进行了分析。试验采用Tekscan® sensor #5513型触觉式传感器,试验时,斜板由2 个透明的聚碳酸酯板固定,传感器固定在斜面上,并在传感器上、下表面黏贴2 层塑料薄层用于防水,同时,还在上层继续黏贴一层金属以防止传感器刮损。在试验开始前,需对传感器进行校准。最终,试验测量得到了斜面结构冰载荷的时空分布,并量化了碎冰堆积对冰载荷的影响。
2016 年,Höderath 等[54]在模型试验中采用触觉式传感器,对结构的压力−面积设计曲线进行了研究。试验模型原型为Norströmsgrund 灯塔,并根据2003 年Norströmsgrund 灯塔上安装的9 块压力板设置触觉式传感器的黏贴位置。根据模型试验数据得到的压力−面积设计曲线与实测结果较为吻合,因此,相较于昂贵的实尺度试验,利用模型试验测量结构的压力−面积设计曲线是较好的替代方法。
相较于国外,国内也开展了一系列的模型试验研究,主要集中在天津大学。邵晶杰[55]针对破冰桩间距对冰载荷的影响开展了试验研究。在模型设计中,需保证模型自振频率比冰层破碎频率(根据经验为0.8 Hz)大5 倍以上,以避免模型试验中的动力因素影响,并在天津大学的冰水池里分别对单桩体和多桩体开展了模型试验。研究指出,对于多桩体情况,两端边缘桩柱的冰载荷值始终比中间桩柱冰载荷值大1.5~2.5 倍,造成应力叠加的只是在边桩的内侧。除了对桩柱结构进行模型试验以外,天津大学的史庆增等[56]还针对锥体结构开展了冰载荷模型试验测量,研究正倒组合锥体结构冰载荷的特点以及锥体间距对结构冰载荷的影响。试验发现,在正倒锥体过渡区间处,海冰会发生挤压失效;当锥体间距小于直径的7~8 倍时,各锥体的冰载荷将受锥体间距的影响而小于单个锥体冰载荷。天津大学开展的有关锥体和桩柱结构冰载荷模型试验对冰区海工结构的设计具有一定的指导意义。例如,关湃等[57]结合天津大学的锥体模型试验,对渤海2 类导管架平台(JZ20-2 MUQ 平台下的非对称式抗冰锥体和JZ9-3 CEPD 平台下的对称式抗冰锥体)开展了优化设计工作。
2) 动冰载荷模型试验测量技术。
在冰层与直立结构和锥体结构发生作用时,均有可能引起冰激振动现象。而冰激振动会引起结构的大幅振动或结构总体冰载荷量级的增加,严重影响结构安全性。因此,动冰载荷是开展海工结构设计的重要数据。相较于静冰载荷模型试验,动冰载荷模型试验起步较晚且较为复杂,不过相关试验机构也开展了大量的研究与设计工作。总体上,动冰载荷测量装置主要分为2 类[58]。第1 类是将原型简化为刚性结构与柔性基础结合的方式,典型的代表如图7(a)所示[59]:模型由上层刚性框架和下层“浮动平台”组成,二者通过四角的连杆连接;4 根连杆的上、下端均为万向铰,为下层平台在水平方向提供顺应性,而在竖直方向则具有足够的刚度,在上层刚性框架上设有竖向支撑钢板以调整模型刚度,水平面内的刚度可通过改变调节杆尺寸进行调整;模型主要的测量仪器有位移传感计、加速度传感器和测力传感器。第2 类模型装置完全模拟原型结构的刚度,典型的代表如图7(b)图所示[60]:试验装置由刚性基础框架、沉箱、支撑装置和测量仪器等组成,沉箱安装在支撑元件上,支撑元件又通过传感器与刚性基础框架相连接。相较于第1 类,第2 类模型因要完全重现原型结构的刚度特点,故模型设计复杂得多。因此,第1 类模型在试验中应用更广。

图7 典型动冰载荷模型试验测量装置Fig. 7 Measuring devices of model test for dynamic ice load
国外针对结构动冰载荷开展了大量研究,2005 年,Barker 等[49]为预报丹麦风力涡轮机上的冰载荷、研究结构的动态特性,开展了大量的模型试验。试验装置为第1 类测量模型。模型通过铰接的方式将上层框架与下层浮动平台组合,以保证模型在水平方向为柔性,竖直方向为绝对刚性。随后,设置了模型刚度和质量调节装置,以调节模型固有频率,满足试验要求。试验成功模拟出了冰层的屈曲失效、挤压失效、混合屈曲挤压失效以及频率锁定现象,给出了结构总体冰载荷及结构的一、二阶振动模态,为风力涡轮机抗冰结构的最佳角度和锥型尺寸的选取提供了指导。为了加深对冰激振动的了解,开发用于研究动态冰与结构物相互作用的物理试验装置,德国汉堡水池(HASV)与芬兰技术研究中心(VTT)合作开发了单自由度(SDOF)模型。SDOF 属于典型的第1 类装置模型[58]。基于该模型,Ziemer 等[61-62]开展了大量模型试验,试验模型包括锥体结构以及以Norströmsgrund 灯塔为原型的直立柱状结构。试验发现,与冰层作用时,结构振幅和冰载荷严重依赖冰层失效模式或振动类型。当冰载荷频率与结构一阶固有频率一样时,结构拥有最大的振幅;当冰载荷频率是结构固有频率的整数倍时,结构拥有最大的冰载荷。试验成功模拟了不同类型冰激振动现象以及结构振幅与冰载荷随工况的变化规律,但未对冰激振动的控制机理进行深入研究。目前,该试验计划还在进行中,用以对冰激振动现象进行定性定量研究。
在国内,黄焱等[63]针对冰激柔性结构振动进程的控制机理予以探索,进行了不同速度的动冰载荷模型试验,发现冰层失效与冰载荷随着冰速呈现出了不同的特征。通过分析,认为冰激柔性柱结构稳态振动的控制机理可以归结为冰与结构的相互作用,结构的振动导致冰以间歇性延−脆模式破坏是这种相互作用过程的主要特征。另外,通过实验,还提出了反映结构与冰相互作用水平的系数,并对作用系数进行了量化。
3.2.3 小 结
总之,海工结构静冰载荷模型试验已趋于成熟。此类试验主要用于分析或确定特定结构的冰载荷,以辅助解决结构设计、事故险情分析预测或保障结构安全运行等工程问题。动冰载荷模型试验测量装置还处于不断的改良中,不过已基本成型。对于由冰层挤压直立结构引起的冰激振动,其控制机理存在许多理论模型,如强迫振动模型[64]和自激振动模型[65]。其中,自激振动模型认为结构振动的原因是冰与结构在作用过程中形成了负阻尼;强迫振动模型认为冰层的破碎长度是固定的,造成冰载荷具有一定的周期性。而随着对中、低冰速下冰激振动的发现,当前学者们多偏向于自激振动的说法。对于冰层与锥体或斜面结构作用时引起的冰激振动,研究者认为结构前的冰层破碎长度是固定的,形成了固定频率的冰载荷,属于强迫振动的范畴。总体上,人们对冰激振动的控制机理、冰层失效模式以及结构冰载荷与振幅变化规律的了解还远远不够。
对于冰载荷模型试验,相似率是试验成功的关键。冰载荷模型试验相比常规水池试验更加复杂,其试验相似率需考虑冰材料的相似、结构的相似以及流体相似。结构动冰载荷的测量和使用分布式压力传感器精细化测量结构的压力分布成为研究趋势。
3.3 冰载荷数值计算方法
随着计算机技术的发展,采用数值方法计算海洋结构冰载荷拥有了巨大的潜力。而冰层与海工结构的相互作用是一个复杂的过程,因此对此作用的数值模拟存在较大难度。国际上针对冰与结构物相互作用的数值方法主要包括有限元法(finite element method,FEM)和离散元法(discrete element method,DEM)。
3.3.1 有限元法
国外学者Sand 和Horrigmoe[66-67]采用非线性有限元法模拟了冰脊与二维斜面、三维锥体结构的相互作用。首先其将冰视为各向同性、允许断裂和压碎的均质非线性材料,并考虑浮力、静水压力和重力的影响,然后利用接触力学中的面−面接触理论及Coulomb 摩擦定律,追踪冰脊与结构的接触和摩擦过程,最后将数值计算结果与Ralston 和Croasdale -Cammaert 公式进行对比分析,发现与Ralston 公式计算得到的水平载荷相差不大,而与Croasdale -Cammaert 公式则相差较大。Sand[68]采用有限元法模拟了不同形状的直立结构与冰层的接触过程。其在数值计算中考虑了材料非线性及冰与结构间摩擦力带来的影响,真实地反映了冰的复杂本构行为,精确地跟踪了冰与结构之间的接触,并考虑了部分或完全浸在水中的冰的浮力。
Brown 等[69]基于损伤力学开发了有限元模型,用来模拟与结构作用过程中冰的连续挤压破碎过程。开发该有限元模型的目的是提供一个可以用于分析冰层非同步失效的动态冰与结构相互作用的模型。该有限元模型包含2 个部分:一个用于模拟完整冰中的损伤累积,另一个用于模拟完整冰与结构之间的碎冰挤出。该模型能够模拟一定应变率的挤压破碎过程,但由于数值模拟是在一维条件下进行的,故不能准确计算作用过程中的结构冰载荷。Choi 和Hwang[70]也基于连续介质损伤理论,使用有限元法模拟了平整冰对近海矩形和圆形结构物的作用,得到了结构的局部冰载荷和总冰载荷,并与其他学者的研究结果进行了对比,结果吻合得较好。传统的有限元法是依赖生死单元技术(ekill and ealive technology)来模拟裂缝扩展。所谓生死单元技术,即在材料损伤开始之前,冰层被当作连续体,当达到一定的失效准则时,冰体材料发生损伤(软化)的现象。当材料完全损坏时,相应的单元会消失。由于生死单元的性质,有限元网格尺寸对模拟结果的影响较大,且网格的消除也会带走系统能。除了利用生死单元技术外,扩展有限元法也是一种模拟裂缝扩展的方法,且裂缝扩展独立于网格。然而,扩展有限元技术无法对交叉裂纹进行模拟,而且也无法对冰体破碎和冰堆积进行模拟[71]。
2009 年,Konuk 等[72-74]首先提出利用黏聚单元模型(cohesive zone model,CZM)模拟了冰层与结构的作用过程。随后,Gürtner 等[43]采用黏聚单元模型模拟灯塔与海冰的相互作用,并将模拟结果与实尺度测量结果进行了比较。模拟结果中,冰载荷数据与实测数据相差不大。随着学者们对黏聚单元模型在模拟冰与结构相互作用过程的适用性及潜力的认可,部分学者开始对黏聚单元模型的局限性进行研究。Pang 等[75]研究了网格尺寸与形状对黏聚单元模型计算精度的影响(图8),得到如下结论:计算得到的冰载荷数据具有严重的网格依赖性,单元尺寸越小,模拟得到的平均冰载荷越大;采用的六面体网格方法简单易行,但限制了裂纹的正交扩展;通过引入四面体网格,可以更真实地模拟裂纹的扩展;要得到准确的冰载荷数据,需要赋予冰体材料准确的力学参数并选择适合的网格尺寸。

图8 不同网格尺寸下黏聚单元模型模拟结果对比图[75]Fig. 8 Comparison of simulation results based on CZM with different grid sizes
国内学者基于有限元法也对冰层与海工结构的相互作用进行了研究。华中科技大学的龚榆峰[76]以ABAQUS 软件为二次开发平台,以其用户自定义子程序为开发工具,分别研究了基于断裂力学和损伤力学的冰载荷直接计算方法,并编写了相应的用户自定义单元子程序UEL。但该研究只是以公式作为参照而缺乏试验数据作为支撑。石础[77]利用自主开发的三棱柱黏聚单元嵌入程序,模拟了灯塔与冰层的相互作用,针对结构刚度、不同倾斜角度的破冰装置、冰层厚度及黏聚单元参数,对作用过程的影响进行了研究,成功模拟出了冰层径向/环状裂纹、碎冰堆积现象,但计算得到的冰载荷数据较实测数据偏高。
综上所述,基于CZM 的有限元法表现出了对冰−结构相互作用过程模拟的适用性。该方法可以较准确地模拟冰层从连续到破碎的过程以及碎冰堆积现象。而基于损伤力学或断裂力学的有限元法在一定程度上虽然可以对冰层与结构相互作用过程中的失效、断裂进行模拟,但对冰层破碎、堆积等过程却无法进行准确模拟。
3.3.2 离散元法
非连续介质方法的代表是离散元法。这是一种动态的数值分析方法,可以用来模拟海冰的非均质、不连续和大变形等特点。早期的离散元法的研究受计算机资源的限制发展较慢。在国外,Williams 等[78]最早将此方法应用到了平面冰层与结构的相互作用分析中,其提出的模型考虑了冰层的破碎、碎冰的运动以及碎冰间的相互作用特性。Hopkins[79]利用块体离散元法模拟了海冰在斜坡式结构物前的堆积过程以及压力冰脊的形成,但彼时未与实际试验数据进行对比。
在后来的工作中,Hopkins[80]直接将数值仿真结果与模型试验进行了比较。其在试验和数值仿真中得到了作用在斜坡上的冰载荷以及海冰势能的变化,发现由数值仿真结果得到的冰载荷和模型试验相比低了20%~30%。Selvadurai 等[81]采用二维离散元程序研究了均匀厚度冰层与弹性结构动力的相互作用。其将冰视为一种脆性材料,考虑了冰破碎后的强度尺寸效应,模拟出了裂纹的起始和扩展、碎冰片的分离和大位移运动,同时,也给出了冰与结构作用区域冰载荷的时空分布。除了将冰与结构作用过程简化为二维以外,也有学者采用三维离散元法模拟了冰层与结构的相互作用。Michael[82]采用三维离散元法程序DECICE3D 模拟了平整冰层对锥体的作用,并与实验结果进行了比较,发现二者吻合较好,但冰层裂纹和碎冰的堆积过程与实际现象存在一定的差异。Katsuragi 等[83]采用三维颗粒流离散元法(PFC-3D)模拟了冰层与三维锥面结构相互作用的问题。其考虑了浮力的影响,模拟了冰碎块沿锥面结构的上爬、下冲和堆积现象。在模拟过程中,冰层被离散成一层颗粒,颗粒直径与冰层厚度一样。其利用三维颗粒流离散元法,便捷地模拟了冰层与锥体的相互作用,但在该作用过程中,碎冰的堆积和冰层的断裂与实际情况相差较大,且其局部冰载荷数据与试验结果完全不吻合。Paavilainen 等[84]采用离散元与有限元耦合的方法对斜面结构前冰层的失效模式以及结构冰载荷进行了研究,其中冰层的断裂采用CZM 模拟,碎冰的接触力采用离散元模拟,最终将数值结果与试验结果进行对比,验证了数值方法的有效性。
在国内,季顺迎教授团队在海冰离散元模拟方面做了大量工作。2014 年,该团队采用离散元法对冰层与锥体结构的相互作用进行了模拟[85],并将数值模拟结果与德国HASV 水池所做试验进行了对比,结果显示吻合较好。在此次离散元模拟计算中,该团队引入了GPU 并行算法,一定程度上弥补了离散元计算耗时长的缺点。2015 年,季顺迎教授团队[86]初步建立了可以模拟结构与冰层相互作用动态响应的有限元法−离散元法(FEM-DEM)耦合方法,在该方法中,冰层采用离散元模拟,海洋结构则采用有限元模拟,以此得到其动态响应。
2017 年,季顺迎教授团队[87]对FEM-DEM 方法进行了完善,建立了海冰离散元和海洋平台结构有限元的冰激振动耦合模型,同时采用GPU 并行算法和动力子结构的方法了提高了计算效率,得到了不同冰速、冰厚下结构所受冰载荷的大小以及结构的振动响应。对于平台结构的冰激振动加速度,显示计算结果与现场实测的振动数据有着较好的一致性,说明并行技术的发展在一定程度上可解决离散元法计算速度较慢的缺点。
近年来,季顺迎教授团队[88]基于闵可夫斯基原理构造扩展多面体单元,发展扩展多面体间的快速搜索算法和黏结−破碎模型,并采用CPU-GPU协同方式进行并行计算,最后采用ISO 标准验证了扩展多面体离散元分析结构冰载荷的准确性。由于海冰在与海洋结构的相互作用过程中会呈现出由连续体向离散块体转换的过程,因此在确定海洋结构冰载荷方面,离散元法具有明显的优势。但采用离散元法计算量较大、耗时较长,且引入了过多的人为假定和经验参数。随着并行计算技术的发展,离散元法计算耗时较长的缺点得到了较好的解决。另外,离散元模型也从传统单元演化出扩展多面体单元和扩展圆盘单元,提高了离散元法的计算精度。
3.3.3 小 结
不管是有限元法还是离散元法,在冰层与结构相互作用的模拟中都表现出了巨大的潜力。有限元法主要是通过材料损伤理论或者断裂力学来模拟冰体的失效行为,因此其重点应放在冰体材料失效模型的研究方面。离散元法若选择合适的黏结模型也可以较好地表征冰层的宏观强度。在数值计算中,水体与冰层的相互影响以及海工结构的变形和损伤不可忽略。将水体划分为欧拉网格、冰层离散为拉格朗日网格可以较好地处理冰层与水体之间的耦合作用,如ABAQUS 软件中的耦合欧拉−拉格朗日 (coupled Eulerian-Lagrangian,CEL)算法和LSDYNA 软件中的任意拉格朗日−欧拉 (arbitrary Lagrangian Eulerian,ALE)算法。学者们考虑到计算成本,常忽略水体的影响或将水体的影响简化为曳力和浮力。
4 结论与展望
前期,对海工结构冰载荷的研究大多集中在欧洲和北美一些国家,且其研究成果已在极地冰区海工平台中得到应用。通过梳理海工结构冰载荷的3 种研究方法,可以发现:
1) 对于冰载荷的公式估算方法,不同公式的计算结果相差较大,且存在适用范围的限制。
2) 对于试验测量方法,结构冰载荷的实尺度数据较为缺乏,且部分数据并未公开。通过在冰水池内开展模型试验,并根据相似准则来预测原型结构的冰载荷是比较准确、可靠的办法。但是,目前国内对该领域的研究与国外相比还存在一定的差距。另外,国际上对于模型试验的相似率还没有统一的标准。其中,对于静冰载荷模型试验主要采用弗劳德(Froude)和柯西(Cauchy)准则相似,而对于动冰载荷模型试验,尚未有较理想的相似率可供使用。目前,国际上开展的动冰载荷模型试验多侧重于冰与结构物的动态作用过程研究,并不能对结构动冰载荷给予准确的预报。
3) 随着计算机技术的发展,海工平台冰载荷的数值计算方法表现出了巨大的潜力。有限元法从传统的有限元法向扩展有限元、黏聚单元模型发展;离散元法也从颗粒单元发展出扩展多面体单元和圆盘单元等新型单元。数值计算方法开始从单一原理向多种计算方法的耦合方向发展,其中黏聚单元模型可以认为是有限元与离散元耦合的方法。
基于以上综述与结论,为提高海工结构冰载荷的研究水平,本文认为应重点关注以下几方面:
1) 冰载荷估算公式的开发需要大量的实尺度或模型试验数据,目的是为设计者提供初期参考,因此该领域的研究者更应注重公式的适用范围和简便性。
2) 对于模型试验,其最终的目的在于实尺度的准确预报,模型试验的相似率是需要重点攻克的难题。而在相似体系里,冰材料的相似至关重要,因此合格冰体材料的制备是关键技术。
3) 对于数值计算,应侧重于计算效率和计算精度,并以试验数据作为参考。有限元等连续介质模拟方法应注重对冰体材料本构模型的研究,离散元法则应注重计算参数的标定和对黏接模型的研究。另外,不局限于单一计算原理,采用多种算法耦合的技术模拟冰层与结构间的相互作用也是具有潜力的研究方向。
猜你喜欢
山东冶金(2022年2期)2022-08-08 01:51:12
疯狂英语·新阅版(2022年1期)2022-01-26 22:21:23
海洋通报(2021年3期)2021-08-14 02:20:38
家教世界(2018年16期)2018-06-20 02:22:00
电镀与环保(2017年6期)2018-01-30 08:33:31
电子技术与软件工程(2016年24期)2017-02-23 19:13:41
海外星云(2016年7期)2016-12-01 04:18:04
小主人报(2016年11期)2016-09-15 08:31:52
中国工程咨询(2015年3期)2015-02-14 03:28:28
河北遥感(2014年4期)2014-07-10 13:54:59
