基于三角模型的机场拦阻功能评估
2021-10-25 09:05张世迪种小雷王观虎
山东科学 2021年5期
张世迪,种小雷,王观虎
(空军工程大学 航空工程学院,陕西 西安 710038)
日趋复杂的机场运行环境导致飞机着陆滑行时风险增加,迫切需要提高拦阻系统的拦阻能力以保证飞机安全。建立拦阻系统评估模型评价实际拦阻过程,从而确定拦阻系统的有效性和可靠性,可为改进系统装置提供决策参考和依据。实际应用中,拦阻系统具体分为拦阻索和拦阻网,两者功能相似,应用范围不同。拦阻功能评价的研究有着重要的工程意义,通过建立评价体系衡量拦阻系统功能,量化分析具体指标确定评价结果,突破常规分析模式,能够为拦阻系统的使用提供科学合理的辅助决策,进而更有效地保证飞机滑行时的安全。
当前,国内外学者针对拦阻系统进行了大量的研究。研究可分为以下两类:一类是研究拦阻过程中拦阻器的变化规律,进而对拦阻效果进行分析,优化拦阻系统。Gibsonpt等[1]以冲击载荷、应力波等为研究对象,确定拦阻索评判的具体标准;张奇[2]设计拦阻钩挂索试验方法和试验装置,仿真分析拦阻钩的运动;姚红宇等[3]对飞机机轮与特性材料拦阻系统之间的作用力建立计算模型;刘成玉等[4]提出包含完整的MK7-3拦阻器刚柔耦合动力学模型和某型舰载机动力学模型为一体的舰载机-拦阻器刚柔耦合动力学系统,可评估飞行器拦停系统性能以及拦停网强度裕度;彭一明等[5]基于舰载机着舰时拦阻钩碰撞过程建立分析模型,研究其动力学过程。另一类是根据拦阻过程中,对飞机运动变化规律进行研究,进而对拦阻有效性做出判断。如Lyle[6]确定了预测飞机拦阻力的具体拟合公式;谢朋朋等[7]建立拦阻系统动力学模型,研究舰载飞机在偏心状态下的拦阻动力学特性;熊文强[8]搭建无人舰载机拦阻地面模拟试验装置,研究拦阻着舰过程;高华峰[9]利用机械系统动力学自动分析(automatic dynamic analysis of mechanical systems,ADAMS)软件计算舰载机拦阻过程中飞机姿态变化规律,以期提出安全可靠评估方法;张晓晴等[10]针对舰载机拦阻着舰时的机身响应过程进行仿真分析。
综上所述,对拦阻系统的研究与优化主要基于拦阻过程中飞机和拦阻钩的运动分析,建立动力学分析模型,并采用有限元或Matlab等软件工具进行仿真研究,研究更多将重点放在拦阻过程分析,没有建立实际的评价准则,无法得到精准的拦阻功能评价结果。而对于拦阻功能评价较少,研究所得结果不能直观体现拦阻系统的变化。
本文以拦阻索为主要研究对象,通过分析拦阻索功能,建立拦阻系统的评价方法,得到普遍性的应用模型。依托三角图论模型,对拦阻系统功能评价标准进行细化,建立评价准则,创新评价方法,为拦阻系统功能普遍性评价准则的确定提供参考依据。通过拦阻功能评价确定拦阻系统有效性和可靠性,对拦阻实际效果做出评判,将结果作为优化拦阻系统的辅助决策手段,为拦阻系统的设计、使用、维护提供重要参考依据。
1 三角模型研究框架建立
1.1 模型构建合理性分析
三角模型可对3个相互联系的体系进行分析和可视化表达,并且可以分析其变化趋势。模型可简明直观地表现拦阻系统不同功能之间的关联关系。结合三角模型与拦阻系统功能进行综合评价是本文分析的重点,相关学者对于三角模型研究较为典型的有:喻麒睿等[11]对青藏铁路布局进行评价研究,设计不同指标依托三角图论模型进行评价;祝培甜等[12]通过三角模型分析西安市土地生态安全的转态趋势。本文在进行拦阻系统评价研究时,对拦阻功能进行分析,针对不同拦阻功能建立数学模型评价方法,建立评价标准,再通过与三角模型结合确定最终评价结果。
三角模型构建合理性的前提是不同功能之间存在负相关关系。当某种功能评价值较大时,另外两种功能中必然有一种的评价值较小。本文选取阻碍功能(hindrance function,HF)、缓冲功能(buffering function,BF)、导向功能(guiding function,GF)作为拦阻系统评价指标。阻碍功能是指阻挡飞机穿越、翻越和骑跨跑道拦阻系统的能力;缓冲功能是指拦阻系统降低碰撞飞机冲击程度的能力;导向功能指使碰撞飞机能够按照规定安全轨迹滑行,不得超过预定的位置。由以上三个功能可对拦阻系统进行整体评价,但考虑功能之间的关系成正相关关系,当阻挡功能评价值较大时,缓冲功能、导向功能评价值也较大。在实际三角模型评价构建中需要对三个评价指数进行适当转换,使评价值可用于拦阻系统三角评价模型。本文中,拦阻系统阻碍功能是核心评价功能,因此考虑对缓冲功能、导向功能进行转化,取非缓冲功能(non-buffering function,N-BF)、非导向功能(non-guiding function,N-GF)作为评价指数。
1.2 功能评价三角模型的构建
公路护栏评价中,文献[13]细分评价标准,并根据公路护栏作用建立评价模型,对公路护栏安全性做出评价。参考公路护栏评价标准,综合拦阻系统阻碍功能、缓冲功能、导向功能等功能指标,根据飞机使用拦阻系统故障原因,对拦阻系统建立三角功能评价模型。评价功能之间关系如图1所示,构建三角模型如图2所示,A、B、C代表某型拦阻系统3次拦阻过程的综合功能评价值,T1~T7为功能变化趋势方向,具体含义如表1所示。

表1 功能变化趋势方向含义表Table 1 Function change direction trend

图1 拦阻系统功能关系图Fig.1 Functional diagram of an arresting system

图2 拦阻系统功能状态评价及趋势示意图 Fig.2 Functional state and trend diagram of an arresting network
图2中三角形为等边三角形,HF评价值位于最高顶点,N-BF评价值位于左下角点,N-GF评价值位于右下角点。每个坐标轴分别沿逆时针方向被平均分成5个等份,代表各指数的5个不同范围:非常低(0,0.2],较低(0.2,0.4],中等(0.4,0.6],较高(0.6,0.8],非常高(0.8,1.0]。根据以上模型建立标准对拦阻系统进行评价分析,具体步骤为:
(1)构建功能评价目标层,细化不同指标,对指标建立不同函数下的评价方法;
(2)收集相关数据,通过功能评价方法对原始数据进行计算,得到各功能指标评价值,对不同功能进行数据处理,包括确定计算权重、数据标准化;
(3)组合权重与指标评价值,得到各具体功能评价指数;
(4)根据计算结果,结合三角模型图,对拦阻系统进行功能评价和稳定性分析。
2 拦阻系统功能评价函数建立
通过分析拦阻索的工作原理,确定拦阻索的功能评价方法,进而将具体应用推广至拦阻系统,得到拦阻系统的功能评估模型。
2.1 拦阻索碰撞运动模型分析
2.1.1 飞机与拦阻索作用过程分析
飞机与拦阻索具体作用过程,如图3所示。飞机滑出跑道接近拦阻索时,通过拦阻钩钩住地面拦阻索,拦阻索在飞机运动中起牵引作用和阻碍作用,此时飞机将着陆时的巨大动能通过拦阻索传递给拦阻机,因此拦阻索在短距离内可将飞机停住。本文模型计算时,假设飞机为刚体,只考虑飞机对称平面内的运动,飞机接地滑行与拦阻索钩住后,以固定迎角做减速运动。

图3 飞机拦阻装置示意图Fig.3 Schematic of an aircraft arresting device
对飞机与拦阻索作用过程进行分析,如图4中所示。H点为飞机与拦阻索最初接触点,接触后,拦阻索随之被拉高,位置为M点,MH为飞机与拦阻索接触点距地面高度,设定拦阻过程中MH为定值L3。其中AB原长设为L,被拉伸后分为AC、BC两段,长度分别为L1与L2,设FX1,FX2为L1与L2在X向的一对分力。飞机与拦阻索接触点距地面高度为L3,滑行轨迹在水平面投影长度为S。

图4 飞机拦阻过程示意图Fig.4 Schematic of the aircraft-arresting process
2.1.2 拦阻索受力结构分析
图5为具体受力分析图,根据建立的分解模型,对其中的各个未知量进行求解。
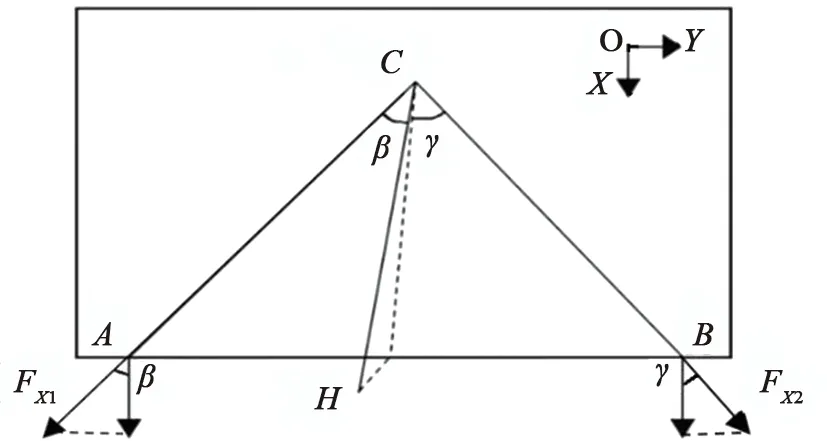
图5 飞机拦阻受力分解图Fig.5 Breakdown of the aircraft-arresting force
令AH=b,BH=a,AB=c,AC=L1,BC=L2,MH=L3,求解得到:

(1)
假设整个拦阻过程中以恒定拦阻力拦阻飞机时,拦阻力与拦阻索拉力之间关系为:
FX′=FX1cosαcosβ+FX2cosαcosγ
(2)
考虑飞机滑行过程中,运动阻力为FZ,因运动阻力变化幅度较大,在具体确定时采用平均运动阻力,此时FZ恒定,飞机在拦阻过程中为匀减速运动,加速度恒定,则拦阻力与拦阻索拉力为恒定值,飞机拦阻力变化规律分析:

(3)
FX″=mfa-FZ。
(4)
由此可得拦阻力初步取值范围:
(5)
进一步可比较FX′和FX″的大小,在Matlab中绘制FX′和FX″函数变化图像,采用数形结合方法比较,分析拦阻力变化规律过程。假定拦阻力范围恒定,FX′>FX″和FX′≤FX″图像分别如图6(a)和6(b)所示,同时根据式(5)讨论结果可得到拦阻力取值范围和最大拦阻力。分如下两种情况讨论:
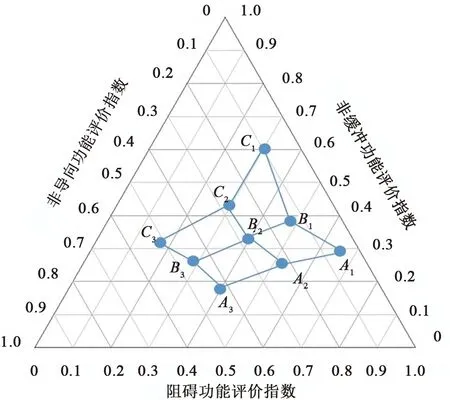
(1)FX′>FX″时,拦阻力取值为:FX′ (2)FX′≤FX″时,拦阻力取值为:FX″ (a)FX′>FX″ (b)FX′≤FX″图6 FX′>FX″和FX′≤FX″函数变化图像Fig.6 FX′>FX″and FX′≤FX″ function change image 评价拦阻索拦阻功能时,将拦阻索最大拦阻力、平均拦阻力和拦阻损失能量等性能作为研究对象。其中,拦阻索最大拦阻力可采用上文所述方法求解得到,平均阻力可采用公式(6)求解。 (6) 考虑构建能量计算模型对阻挡功能进行评价。根据关系式(6),对飞机的破坏程度构建阻挡能量计算函数。在评价阻挡功能时,对轨迹方向采用能量法计算所做功。具体计算公式如式(7)~(8)所示: (7) (8) 根据Ek=Wf可知: (9) 在文献[14]的飞机最小荷载表中,已对拦阻索允许的重量和速度要求作出规定,本文研究模型中,作用于拦阻钩的荷载不超过文献[14]中飞机最小荷载表中数值。因此可对应飞机质量,将拦阻速度、最大钩载作为计算时的最大值,进行具体的指标评价计算。 缓冲功能是指拦阻索降低碰撞飞机冲击程度的能力。评价拦阻索的缓冲性能时,将飞机与拦阻索碰撞过程简化为一段连续的过程,在实际滑行中,飞机与拦阻钩接触后,所做运动为变速运动,此时可考虑将飞机视为质点m,则在j时刻速度如果为Vj,针对某一时刻的速度增量,在j+1时刻,这时质点速度为: Vj+1=Vj+ajΔt。 (10) 结合式(3)可得飞机质点m的加速度,如式(11)所示。 (11) 式中,Fxj为j时刻拦阻力的水平分量。 根据式(10)~(11)可得每一时刻飞机的速度,进而得到整个过程的飞机状态和飞机轨迹。通过计算质点速度、质点加速度的变化进行判断,若速度、加速度变化越大,则可认为拦阻索的缓冲功能表现越明显。通过以上内容,结合碰撞时速度及加速度要求对拦阻系统缓冲性能进行评价。 导向功能指飞机与拦阻系统接触后,飞机驶出驶离点后的轨迹应符合规定的导向轨迹,不得越出预定区域。具体评价时可采用增量法,当时间增量较小时,在一定的时间间隔内,可认为飞机质点m受力基本保持不变,因此可得到位移如式(12)所示: xj+1=xj+vj+1Δt=xj+(vj+ajΔt)。 (12) 由上式可得质点m相应的位移,进而得到整个拦阻时间内飞机的运动轨迹,由此可根据拦阻过程中的拦阻轨迹对飞机导向情况进行判断。当速度停止时,此时飞机不得超过安全区域,拦阻索效果为有效拦阻,否则,为无效拦阻。 实际评价中,导向功能为非相关评价指标。可计算预设滑行轨迹与计算滑行轨迹之间的偏离程度,定义为非导向功能指标。如图8所示,考虑采用预设滑行轨迹与计算滑行轨迹间的最大差值(图8中h段),即平均偏差距离为具体计算指标,如公式(13)所示。以上两个指标可反应拦阻索缓冲功能的最大程度和平均程度,进而可判断拦阻索是否起到相应导向作用。 (13) 图8 预设滑行轨迹与计算滑行轨迹图Fig.8 Preset glide path and calculated glide path 三角模型要求指标间成负相关关系,根据一正两反的评价指数要求,将上文评价指标设置为阻碍功能评价、非缓冲功能评价、非导向功能评价三组相互关联,成负相关的指数。 参考第2节的指标划分及计算方法,对拦阻系统的指标评价体系进行构建,采用指数层-指标层两层指标评价体系,通过权重组合方法将指标层数值进行组合。具体评价指标体系如表2所示。 表2 功能评价综合指标体系Table 2 Comprehensive index system of functional evaluation 评价指标体系运算如下: (1)计算数据处理。不同指标的量纲不同,因此需要对指标值进行标准化处理。 对于正向指标: Xij=[xij-min(xij)]/[max(xij)-min(xij)]。 (14) 对于负向指标: Xij=[max(xij)-xij]/[max(xij)-min(xij)]。 (15) (2)评价指标权重的确定。确定指标权重时,采用层次分析法确定指标具体权重,层次分析法可以满足对评价指标的具体分析需要,指标权重满足下列关系: (16) (3)计算综合指数。将步骤(1)(2)中结果组合计算,可得到对拦阻系统不同功能的最终评价结果。具体计算公式如式(17)~(19)所示: (17) (18) (19) 式中,αHF、αN-BF、αN-GF分别为HF、N-BF、N-GF的评价结果值。 在将计算数据标准化和确定权重值后,可计算综合评价值。采用加权法确定具体权重值,将指数确定为综合评价指数,运用三角模型进行评价。将一次拦阻计算所得三个功能评价值带入三角模型中,通过三角模型对拦阻系统进行综合评价。 在实际应用过程中,可对几次不同的拦阻过程进行综合评价,通过评价结果判断拦阻系统实际的拦阻可靠性和有效性,通过设定可靠性和有效性的确定数值得到拦阻失效时的具体评价结果。 以某型舰载机拦阻系统为例,对拦阻过程进行分析。通过舰载机飞机得到拦阻系统的功能评价方法。在实际拦阻机应用过程中,舰载机拦阻着舰参数如表3所示。 表3 舰载机拦阻着舰参数Table 3 Arresting and landing parameters of a carrier aircraft 采用表3中数据,对飞机拦阻变化规律参数进行求解。拦阻力恒定值Fxh取为750 620 N,采用公式(1)~(5)可求解出拦阻力3个角度为0.79°、4.40°、8.75°,拦阻索拉力为3 820 070 N,拦阻加速度为39.6 m/s2,拦阻力初步取值范围为3 820 070~3 900 425 N,由式(7)~(9)可得,最大拦阻力为3 900 425 N、平均拦阻力为3 867 516 N。 通过式(11)判断飞机缓冲功能,利用增量法求得飞机的速度变化曲线和飞机加速度变化曲线,根据速度变化趋势程度进行具体功能评价。通过式(12)对飞机导向功能进行评价。采用增量法计算拦阻过程中飞机大致轨迹,将飞机视为质点,此时可通过轨迹分析飞机导向功能。预设滑行轨迹如图8中实线所示,采用计算偏差方法,对预设滑行轨迹与计算滑行轨迹进行比较,计算最大偏差距离和平均偏差距离得到导向功能评价值。将具体功能评价值进行量纲归一化处理。采用层次分析法求得评价指标权重如表4所示。 表4 功能评价综合指标权重Table 4 Weight of comprehensive index of functional evaluation 将权重与评价组合,通过以上求解得到拦阻力阻碍功能、非缓冲功能、非导向功能所得值依次为0.83、0.46、0.64,如图9中点C3所示。可依次采用不同组数据进行评价,计算出不同组数据评价时所得数值,对数值进行具体分析,得到不同三角形构建具体求解模型。采用9组不同数据计算得到9个不同点,依次为A1~C3,结合三角评价模型,对拦阻系统做出相应评价。 图9 三角模型功能评价图Fig.9 Function evaluation diagram of the triangle model 实际评价过程中,参考3个方向坐标系评价。针对阻碍功能评价指数,对应点为A1、A2、A3,此时3组数据沿HF轴减小,即拦阻次数增加时,阻碍功能评价值减少,拦阻系统的阻碍功能下降;针对非导向功能评价指数,对应点为A1、A2、A3,此时3组数据沿N-GF轴增大,即拦阻次数增加时,非导向功能评价值增加,该评价指数为负向评价指数,表明拦阻系统的导向功能下降;针对非缓冲功能评价指数,对应点为A1、B1、C1,此时3组数据沿N-BF轴增大,即拦阻次数增加时,非导向功能评价值增加,该评价指数为负向评价指数,表明拦阻系统的导向功能下降。通过其余各组对应点可得出相同结论。在图9中可得,拦阻系统使用越多,可靠性越差,难以实际拦阻飞机。 本文采用三角模型对拦阻系统功能进行评估,通过功能评价图可直观确定评价结果,对系统拦阻效果做出评判。相较于文献[13]中对公路护栏采用防护等级评价研究方法,所得结果对应不同防护等级,评估结果为模糊值,本文研究成果可准确确定拦阻系统评价结果,在确定拦阻系统功能评价结果的同时,进一步对拦阻系统使用寿命做出预测,为拦阻系统的使用维护提供理论支撑。相较于文献[15]中对拦阻系统采用故障树分析确定系统可靠性,得到失效概率的方法,本文以图像方式确定拦阻功能具体效果,在工程实践中便于开展具体计算,进而对拦阻系统的有效性和可靠性作出判断。 本文构建三角模型对拦阻系统进行评估,以三角模型中评价值对拦阻系统可靠性和有效性进行分析,为拦阻功能做出评判。通过文中建模分析确定不同功能的评价数值,可依据数值得到如下结论: (1)拦阻次数增多,拦阻系统阻碍功能、导向功能、缓冲功能均下降,此时拦阻系统可靠性与有效性降低。 (2)若根据需要设定拦阻系统工作的最低阈值,可建立具体的评价方法,当拦阻系统不满足条件时,对应的实质表现为拦阻系统功能评价值低于最低阈值,据此可评定拦阻系统属于不可用状态,可为拦阻系统能否继续使用提供判断依据。 (3)结合三角模型可对拦阻系统的性能变化趋势进行分析,如图1中所示,T1~T7表示7种变化状态,结合图9,评估B1~B3这组数据,确定拦阻系统各功能变化趋势,为继续设计和改进拦阻系统装置提供参考依据。 本文为拦阻系统的可靠性和有效性评价提供参考方法,以判断拦阻装置在实际拦阻过程中的作用。但限于历史拦阻数据和功能评价方法的不足,后续研究需要进一步加强对各功能的具体评价方法的优化,采用更多组数据评定拦阻系统的可靠性和有效性,以提高本文建立模型的普遍适用性。
2.2 拦阻力变化规律评价阻挡功能过程




2.3 缓冲功能评价
2.4 导向功能评价



3 三角模型综合评价拦阻系统功能
3.1 评价指标体系综合构建



3.2 三角模型综合评价及结果变化趋势分析
4 案例分析
4.1 案例应用


4.2 对比分析
5 结论
猜你喜欢
作文成功之路(高考冲刺)(2022年8期)2022-11-21环球时报(2022-05-30)2022-05-30当代陕西(2020年23期)2021-01-07读友·少年文学(清雅版)(2020年4期)2020-08-24读友·少年文学(清雅版)(2020年3期)2020-07-24当代陕西(2019年11期)2019-06-24现代装饰(2018年5期)2018-05-26作文周刊·小学一年级版(2017年9期)2017-06-20中国三峡(2017年2期)2017-06-09中国洗涤用品工业(2017年2期)2017-04-16