
基于卷积神经网络的城市道路交通流标志识别研究
2021-10-23 04:06文宏
新型工业化 2021年7期
文宏
(甘肃机电职业技术学院,甘肃 天水 741001)
0 引言
道路交通事故已成为城市交通管理的顽疾,造成道路交通事故的原因有多种,相关机构进行了统计分析,如图1所示为因缺少道路交通标志牌造成交通事故的百分比。图中可以得出看出,该统计区域内有64%的交通事故是由于缺少道路交通标志牌造成的。
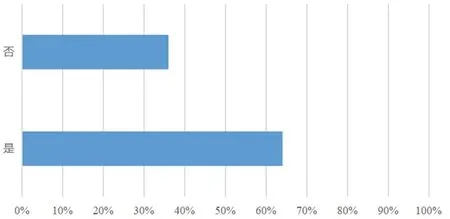
图1 错过道路交通标志造成交通事故统计数据
在交通标志识别方法中,车辆能够确定道路交通标志并避免发生事故。这些标志可能包括各种道路符号警报,例如“速度限制”、“单向”、“前方学校”等。根据当前交通管理业务需要,由于道路上交通拥挤,驾驶员很可能会错过道路交通标志牌警报;同时由于城市人口过多,情况甚至恶化,而且某些道路交通标志信息可以从GPS获取,但并不总是最新的。交通管理系统的设计便于提取道路交通标志,在汽车的面板上显示,或者可以转换为音频信号,为驾驶员提供通知警报[1-2]。
交通标志识别是针对驾驶员辅助系统(Driver Assistance Systems,DAS)和自动驾驶(Automated Driving,AD)提出的解决方案之一。但是,由于环境条件(例如阴影,闪电等)的变化,此类分析对于计算机而言并非那么容易,晴天时会捕获明亮的图像。图像中交通标志的识别包括两个主要步骤:检测和分类,因此系统设计中面临的主要挑战是考虑天气情况及车辆周围环境的变化。
本文设计了基于卷积神经网络的交通标志识别(Traffic Sign Recognition,TSR)系统,不仅有助于减少道路交通事故,而且还可以鼓励驾驶员保持合法速度,遵守交通规则和指示,并确保安全驾驶。
1 交通标记识别
1.1 关键技术
交通标记识别主要依托以下几类技术进行整合分析研究。
(1)卷积神经网络(Convolution Neural Network,CNN)。CNN用于各种道路交通标志识别应用中的图像识别技术。在文献[3]中所设计的系统包含三个主要阶段:交通标志感兴趣区域(Region of Interest,ROT)阶段、ROI的优化和分类阶段、后期处理阶段,本文将改进的卷积神经网络用于图像识别。
(2)图像分割。在相关研究中,图像分割技术用于通过将交通标志与提供的数据集进行比较来确定交通标志的形状。道路交通标志识别的图像分割技术由于在汽车行驶过程中捕获的模糊图像而导致输出不准确。在相关研究中,RGB颜色分割技术与基于规则的方法一起使用,进行图像形态分析以确定交通标志的形状。
(3)交通标志检测。从相机拍摄的图像通常质量较差,因此系统需要增强图像质量,以获得正确的结果。在实际对图像进行分类之前,应用了各种预处理技术,图像被转换为各种颜色空间。基本上,图像归一化技术用于调整图像的亮度,以便准确地检测交通标志。
本文采用帧提取方法,从车载摄像头捕获的视频作为第一步,RGB是一种加色组件模型,其中将红色,绿色和蓝色组合在一起以获得各种阴影。使用RBG颜色分量是为了减少系统的时间和空间复杂度。帧归一化技术用于调整由于环境因素而导致的图像亮度[4-5]。
1.2 系统架构
使用分类技术完成图像特征提取和分类器训练。通过SVM分类器与H OG特征,具有径向特征的多层感知器(Multi-Layer Percep tron ,MLP),人工神经网络(Artificial Neural Network ,ANN)以及旋转不变二进制模式(Rotation Invariant Binary Pattern,RIBP)一起使用。另一方面,卷积神经网络(CNN)可以被认为是用于训练和分类的流行技术之一。在文献[6]中,交叉熵损失的改进版本用于CNN训练。尽管CNN在图像分类方面表现出出色的性能,但设计良好的体系结构并训练可行模型的任务仍然是具有挑战性的任务之一。
使用Canny边缘检测算法以突出显示边缘,以便将交通标志的形状与提供的图像识别数据集进行比较 Canny基本上包括四个用于边缘检测技术的模块,应用高斯滤波器以平滑图像以抑制噪声。应用高斯滤波器后,使用Sobel滤波器计算图像的强度梯度。之后,选择特定的阈值以抑制噪声并确定确切的边缘。此外,为了精确的边缘检测,有必要抑制非最大像素。此后,应用双阈值以确定潜在边缘。在确定强边缘和弱边缘之后,哪些弱边缘是实际边缘。为了实现这一点,通过使用滞后来跟踪边缘。为了确定最终的坚固边缘,该过程以迭代方式进行。最终,系统迭代弱边缘将其值设置为零,从而生成最终图像[7-9]。如图2所示为系统架构图。

图2 系统架构图
1.3 检测算法
第一步:减少噪声
使用高斯滤波器对图像中的噪音进行移除。
第二步:强度梯度计算
计算公式如下:
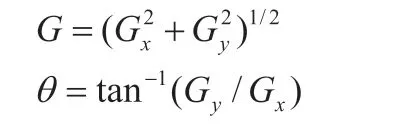
其中G表示图像每个像素的边缘梯度,θ表示边缘方向。G x和G y表示水平和垂直方向过滤后平滑图像的一阶导数。
第三步:非最大抑制
选择阈值以便抑制噪声并确定确切的边缘。此外,为了精确的边缘检测,有必要抑制非最大像素。
第四步:阈值排除
若edge > 最大阈值:包括
若edge < 最小阈值:已排除
最大阈值 > edge > 最小阈值:包括(仅当edge连接到强连接的edge时)。
基于以上算法描述,对系统执行流程进行设计,如图3所示。

图3 系统流程图
(1)前期处理。在预处理阶段,图像被转换为RGB颜色分量模型,此外,对帧进行归一化以优化图像外观并控制有时由于晴天而造成的过高亮度。使用高斯滤波器来平滑图像并消除可能导致不准确的噪声。该预处理的图像帧被发送到图像检测阶段以进行进一步处理。
(2)图像检测。在图像检测阶段,经过优化和预处理的图像帧经过二值化技术,在二值化中,交通符号由白色像素表示,而背景由黑色像素表示。这有助于找到图像中道路交通符号的大概位置,并以(x,y)坐标的形式获得结果。
(3)形状分类。此外,在从图像帧中定位道路交通的近似坐标之后,Canny边缘检测算法用于突出显示道路交通符号的边缘,其位置是从前一阶段获得的。此输出被发送到卷积神经网络,在该网络中对图像帧中的实际道路交通符号进行匹配,并完成从数据集中提供的道路标志模板。此输出进一步提供给模糊聚类,以提高系统的准确性。
(4)模糊聚类。模糊聚类输出将被划分为一定的概率集,最终结果将从匹配的可能类别中提取出来,然后将其转换为音频。
2 结语
本文提出了一种新的道路交通标志识别技术的改进方法。通过车载视频获取图像源,应用预处理技术提高图像帧质量,确定交通标志的大致位置,并将其发送到卷积神经网络进行训练和分类。模糊聚类充当用于改善CNN获得的结果的优化器。该交通标志识别系统将帮助驾驶员轻松跟踪交通标志,避免发生事故,从而减少交通伤亡人数。
猜你喜欢
汽车实用技术(2022年9期)2022-05-20
商用汽车(2021年4期)2021-10-17
现代园艺(2018年2期)2018-03-15
汽车与安全(2017年5期)2017-07-20
汽车与安全(2017年3期)2017-04-26
通信产业报(2016年44期)2017-03-13
小天使·一年级语数英综合(2016年8期)2016-05-14
小天使·一年级语数英综合(2014年7期)2014-06-26
雕塑(1999年2期)1999-06-28
雕塑(1996年2期)1996-07-13
