
基于ZigBee的智能路灯控制系统
2021-10-23 04:06陈忠林张士晶詹宇川胡倍萌高鸿波
新型工业化 2021年7期
陈忠林,张士晶,詹宇川,胡倍萌,高鸿波
(南昌航空大学无损检测技术教育部重点实验室,江西 南昌 330063)
0 引言
随着社会经济的发展,城市化进程的不断加快,城市路灯的安装数量日益增加,方便了人们的日常出行。但是,目前大部分路灯系统仍然按照定时控制或人工控制的方式开关路灯,造成了能源的大量浪费。此外传统路灯线路布局复杂,维护成本较高,又造成了经济上的巨大损失[1]。针对上述问题,本文基于ZigBee无线通信原理,结合模糊控制算法,设计一种智能路灯控制系统。该系统由超声波传感器、光强传感器、人体红外传感器、ZigBee无线通信模块等组成,并利用模糊控制算法实现对路灯的智能调控的功能。智能路灯控制系统能够实时无线监测路灯运行状态,对路灯亮度进行自动(或手动)的按需调节,有效地节省了电力资源,降低了布线成本。
1 系统总体设计
智能路灯控制系统主要由传感器模块、路灯终端模块、数据采集模块、客户机模块构成。图1为系统的总体结构框图,路灯终端安装在每个路灯上,将传感器采集到的各项数据通过ZigBee无线网络传输到无线网关,多个路灯终端与一个无线网关在一定区域内组成一组局域网,每个设备之间可以相互通信,即单一设备损坏不影响整体通讯。无线网关通过GPRS把数据传输到路由器,路由器通过网线与服务器连接,服务器通过互联网将数据传输到客户机端(电脑、平板电脑、手机)。客户机接收到数据后进行智能处理分析,通过模糊控制算法进行自动或手动调节路灯的开关和亮度。图2为实物示意图。

图1 智能路灯控制系统总体结构框图

图2 实物示意图
2 系统主要功能模块设计
2.1 数据采集模块
智能路灯控制系统的传感器模块包括人体红外传感器、超声波传感器、光强传感器。传感器模块负责采集环境光照强度数据,车辆距离数据,是否有行人出现数据。并将数据传输给单片机。光强传感器使用型号为GY-30 BH1750FVI的一款数字型光强度传感器,此型号传感器相较于同类传感器,响应速度更快。当有外界光照时,内部的光敏二极管通过光生伏特效应将输入光信号转换成电信号,经运算放大电路放大后,由ADC采集电压,然后通过逻辑电路转换成16位二进制数存储在内部的寄存器中,终端读取寄存器中的光照强度数据。超声波传感器使用型号为HC-SR04的一种压电陶瓷超声波传感器,测量精确度高。人体红外传感器使用型号为HC-SR501的一种热释电人体红外传感器,功耗小,使用方便。

图3 系统传感器模块与路灯终端模块电路连接示意图
2.2 路灯终端模块
路灯终端模块由传感器模块、单片机、Zig Bee模块组成。终端是系统运行的基础,其核心是STM 32F103C8T6单片机模块,传感器模块通过引脚与单片机相连,Zig Bee模块通过串口与单片机相连。Zig Bee模块选择CC2530芯片,使用Z-stack协议栈进行无线通信网络的组建[2]。路灯终端负责综合收集传感器模块采集到的各项数据,通过ZigBee模块传输到无线网关,在接收到客户机下达的指令后通过调节路灯PWM输出,实现对路灯亮度的智能调节。
2.3 数据采集模块
本模块由无线网关、路由器、服务器组成,主要负责将路灯终端的数据传输到客户机,并将客户机指令反馈到路灯终端。ZigBee技术是一种基于IEEE802.15.4标准的低功耗局域网协议,其主要特点是低复杂度、自组织、稳定性高、低功耗、低传输速率,目前主要应用于自动控制领域和远程控制领域。ZigBee网络内部通过16位或者64位IEEE地址通信。Zig Bee网络有三种网络拓扑结构,分别为星型、树型、网状型。本系统为了拥有更加方便灵活的通信网络,选择以网状拓扑结构搭建ZigBee无线通信网络,使各设备之间可以相互通信,增强系统的稳定性、自适应性。无线网关节点是此自组网络的中心,每个无线网关与多个路灯终端组成一组局域网。终端将收集到的数据通过ZigBee传输给无线网关[3]。路由器的主要作用是辅助其他设备申请入网,进行相应的数据跳转和协助子终端节点之间进行通信,与无线网关通过GPRS协议相连。服务器的主要功能是组建连接网络、传输对应数据、控制管理整个通信网络,向客户机提供路灯状态并传达客户机指令,与路由器通过网线连接[4]。
3 控制算法
相关文献研究表明[5],在夜间十一点半后,道路上行人与车辆数量明显减少,而此时道路路灯仍保持全亮状态,造成电能的大量浪费,同时考虑到行人与车辆对照明需求的不同,故而以夜间十一点半为系统智能控制起始时间,在路灯灯座上安装行车路灯(主灯)和行人路灯(副灯)两个光源,使光能得到更加高效的利用。为了实现上述智能调控功能,系统引入模糊控制算法。模糊控制算法是一种以模糊集合、模糊语言变量和模糊逻辑推理为基础的智能数字控制技术。模糊控制的核心是模糊控制器,其主要包括变量模糊化、建立相关规则库、进行模糊推理、解模糊四个部分[6]。变量模糊化的主要作用是确定模糊控制器的输入变量,并将其转换为系统可识别的标准模糊变量,并且需要确定变量相应取值范围,建立相关隶属度函数。由于此系统只有单一的输入输出变量,故选择三角形隶属度函数。如图是建立的车辆与路灯距离(P)和路灯实际亮度占额定亮度的百分比(f)的隶属度函数示意图。

图4 车辆与路灯距离(p)的三角形隶属度函数图

图5 路灯实际亮度占额定亮度的百分比(f)的三角形隶属度函数图
根据生活经验,建立规则库如下表。

表1 车辆与路灯距离和路灯实际亮度占额定亮度的百分比之间的对应规则
根据《CJJ 45-2015 城市道路照明设计标准》,普通城市主干道路路灯要求在路灯四十米范围内有着良好的照明作用。综合考虑节能与照明需求可知[7],路灯实际亮度在额定亮度的65%-95%之间时可以满足视物需要。因此本系统选择四十米作为路灯智能控制范围,设置路灯实际亮度在65%-95%之间,达到照明与节能之间的平衡。规则表中p-nearer, p-near,p-medium, p-far, p-farther,依次表示车辆与路灯的距离由近及远,brighter, bright, medium, dark, darker,依次表示路灯实际亮度由亮变暗。
模糊推理是指将设置的模糊变量与相应的模糊规则相对应,为下一步解模糊奠定基础。解模糊是将模糊推理后得到的控制变量转化为相应控制输出。考虑到系统的简洁性与准确度要求,本系统采用最大隶属度平均法(MOM)进行解模糊。下图即为路灯系统的模糊解。

图6 车辆与路灯距离p(米)和路灯实际亮度占额定亮度的百分比f(%)之间的模糊解
模糊控制算法通过stlink装置写入到单片机之中,实现硬件与软件的有机结合。下图为系统智能控制流程图。

图7 系统智能控制流程示意图
4 实验结果分析
由于实验条件限制,进行系统测试时,以可调节LED模拟路灯,超声波传感器探测距离低于实际距离两个数量级,简化路由器、服务器,组建ZigBee网络,通过客户机对系统进行控制。在实验室环境测试中,ZigBee网络通信正常,在调控范围内系统整体运行正常,超出调控范围时,数据无法正常传输,存在丢包现象,可通过添加功率放大器提高通信稳定性。在系统出现误差较大情况下,可切换到手动控制模式。在此模式下,可直接手动控制路灯亮度。以下系统实验均在自动控制模式下进行。
4.1 系统稳定性、精确性测试
以车辆与路灯距离3cm(实际3m)为例,系统时间调试到夜间11:30,通过比较仿真结果与实物测试结果之间的差异,以此测试系统的稳定性、精确性。
由图8可知,当车辆与路灯距离为3m时,对应路灯实际亮度为94%。由图9可知,当车辆与路灯距离为3cm时,对应路灯实际亮度为95%。由实验结果与仿真结果对比可知,当距离一定时,两种情况下行车路灯(主灯)的实际亮度有一定的误差,反复测试显示,此误差与系统超声波传感器灵敏度不高、探测范围较小有关,可通过调换成探测范围更广、灵敏度更高的测距设备如雷达解决问题。
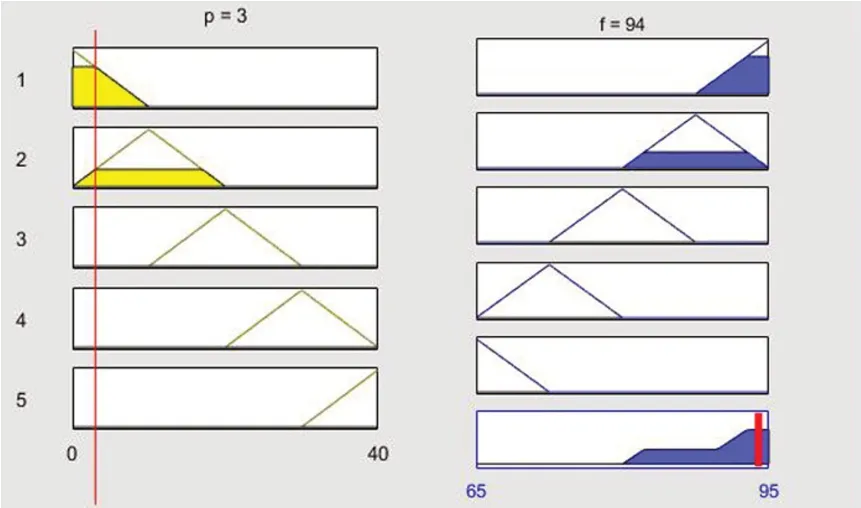
图8 仿真结果图

图9 实物测试结果图
4.2 系统节能性能测试
在自动控制模式下,本系统工作阶段可分为以下四个阶段。第一阶段为从白天光照充足到环境光强高于25lx阶段,这段时间光线充足,能满足人们出行需要,路灯处于关闭状态。第二阶段为环境光强低于25lx时至夜间十一点半阶段,这段时间内,人流量、车流量巨大,路灯以额定亮度的95%进行稳定照明。第三个阶段为夜间十一点半至早上五点,这段时间里行人、车辆数量较少,路灯以额定亮度的80%、25%对行人路灯亮度进行控制,以额定亮度的25%、65%-95%对行车路灯进行控制。第四阶段为早上五点后,外界光照强度已足够满足视物需求,路灯关闭。在手动控制模式下,可直接通过上位机调节路灯亮度。由于实物探测距离限制,首先在一段时间内记录实际道路上通过指定路灯四十米长度范围内的行人数量、车辆数量、行人通过时间、车辆通过时间,再在实验室条件下,仅改变四十米长度为四十厘米,其余条件不变,模拟实际行人、车辆通行情况。

表2 模拟的智能路灯控制系统在普通城市主干道路上一段时间内在一个路灯作用的演示情况
表中时间数据通过秒表得出,路灯实际亮度数据通过系统客户机直接显示得出,路灯平均亮度通过加权平均值模型,由公式可以得出。T表示平均亮度,Mi表示在i时间内路灯的稳定亮度,Hi表示i时间段内的时长占总时长的比重。通过查阅国家道路照明标准,结合本系统设计情况作出以下限定:(1)行人路灯使用额定功率为150W的LED灯泡,行车路灯使用额定功率为200W的LED灯泡;(2)路灯实际亮度占额定亮度百分比即为路灯实际功率占额定功率百分比。结合上表数据,可以粗略计算出在20:00-02:00共计六个小时内,在智能控制系统调控下的一个路灯(包含行人路灯和行车路灯)在额定亮度65%以上工作的耗电量。见公式(1)

Eo表示在第o个时间段内的行人路灯实际功率在65%以上时间,Uo表示在第o个时间段内行人路灯在额定功率65%以上工作时间,Ao表示在第o个时间段内的行车路灯实际功率在65%以上时间,Bo表示在第o个时间段内行车路灯在额定功率65%以上工作时间,R表示耗电量。代入数据可得R=0.26KW·h,传统路灯在测试时间内以100%的额定功率进行照明,由此计算的耗电量R=0.54KW·h。综上所述,智能路灯控制系统具有52%的节能率,在节约能源方面有着巨大作用[8]。
5 结语
本文将模糊控制算法、ZigBee无线网络应用到智能路灯控制系统中,将路灯控制分为四个阶段,并使用双灯设计,结合了自动与手动两种控制模式,对路灯亮度实现了智能调控。该系统减少了传统路灯布线的成本,节省了人力、财力,也大大减少了能源的消耗。通过计算,智能路灯控制系统具有52%的节能率,本系统在智能化、节能化方面具有重要的实用意义。该系统的功能还可以进一步开发完善,例如增加监测空气质量功能、提供摄像拍照功能等,具有较大的市场开发价值与广阔的应用前景。
猜你喜欢
启蒙(3-7岁)(2018年12期)2018-12-13
小学阅读指南·低年级版(2017年11期)2017-12-06
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
电源技术(2015年11期)2015-08-22
中国教育信息化(2010年8期)2010-08-15
计算机世界(2009年32期)2009-09-30
现代电子技术(2009年14期)2009-09-05
