
一种雷达探测波形精细化设计方法
2021-10-21 11:55:50杜天有
现代导航 2021年5期
杜天有,于 濛
(中国电子科技集团公司第二十研究所,西安 710068)
0 引言
三坐标相控阵雷达一般需要在方位、俯仰两维空域内进行目标的快速搜索和截获。从雷达设计者的角度看,希望雷达具有很高的天线增益,保证雷达探测威力,但是若天线增益增大,必然会出现波束宽度变窄,进而导致搜索特定空域需要的波位数变多,雷达搜索数据率不能满足要求。
对于三坐标相控阵雷达,时间资源非常宝贵。相控阵天线波束的快速扫描能力和探测波形的快速变化能力,使相控阵雷达的工作方式具有多样性,为雷达完成多种功能、实现多种工作方式提供了灵活性和自适应调节能力[1-2]。如何充分利用相控阵雷达的这一特点,根据探测任务、工作方式进行精细化设计,节省时间资源,是三坐标相控阵雷达设计的一个关键点。
本文结合某雷达系统的总体设计方案,根据三坐标相控阵雷达在俯仰维探测目标在空域分布的典型特点,提出一种探测空域和波形精细化设计方法,在保证雷达正常搜索范围的前提下,雷达时间资源节省效果非常明显,具有很好的工程应用价值。
1 探测模型建立
1.1 对空探测空域覆盖模型
假设雷达探测高度为ht,雷达架设高度为hr,地球半径为Re,可建立如图1 所示模型[4-5]。
图1 中A点为雷达架设点,B、C点为雷达对空波束与探测高度等高线的交点;O为地心;雷达对空最大探测距离为R;波束与雷达架设位置的地平面夹角为θ。
从图1 可以看出,当雷达探测高度随仰角增大,高度增大。当超过某个仰角时,雷达探测覆盖范围的部分区域位于雷达探测高度ht之上,如图阴影部分所示。根据雷达探测高度需求,这部分区域为非雷达探测的必须覆盖区域,因此在雷达设计时可对高仰角区域采取更小的脉冲重复周期,缩减雷达探测范围,则可有效地节省雷达时间资源。在设计时,可根据仰角波位分布,计算出每个仰角波位对应的最大探测距离(等高线以下空域),然后进一步计算每个波位的脉冲重复周期即可。
在该模型中,雷达探测高度ht,雷达架设高度hr,地球半径为已知变量Re,雷达探测斜距为需要求解的变量。根据三角形余弦定理,在△ABO中存在以下几何关系:
式中,OB=Re+ht,OA=Re+hr,AB为雷达探测斜距。
1.2 对地探测空域覆盖模型
同理可得到对地探测空域覆盖模型如图2 所示。
在该模型中,雷达架设高度hr,地球半径Re为已知变量,雷达探测斜距为需要求解的变量。根据三角形余弦定理,在△ABO中存在以下几何关系:
式中,OB=Re,OA=Re+hr,AB为雷达探测斜距。
1.3 探测波位分布
假设在俯仰维的3 dB 波束宽度为θ,俯仰维搜索波束排布按照3 dB 交叠进行设计,则每个波束在俯仰维的覆盖范围如图3 所示,波束上沿和下沿与探测等高线存在不同交点A和C,为了保证波束整体覆盖范围,对空探测波束需要按照波束下沿计算其最大探测斜距。
根据天线口径,按3 dB 交叠空域覆盖进行波位设计,俯仰维19 个波位,详细分布如表1 所示。
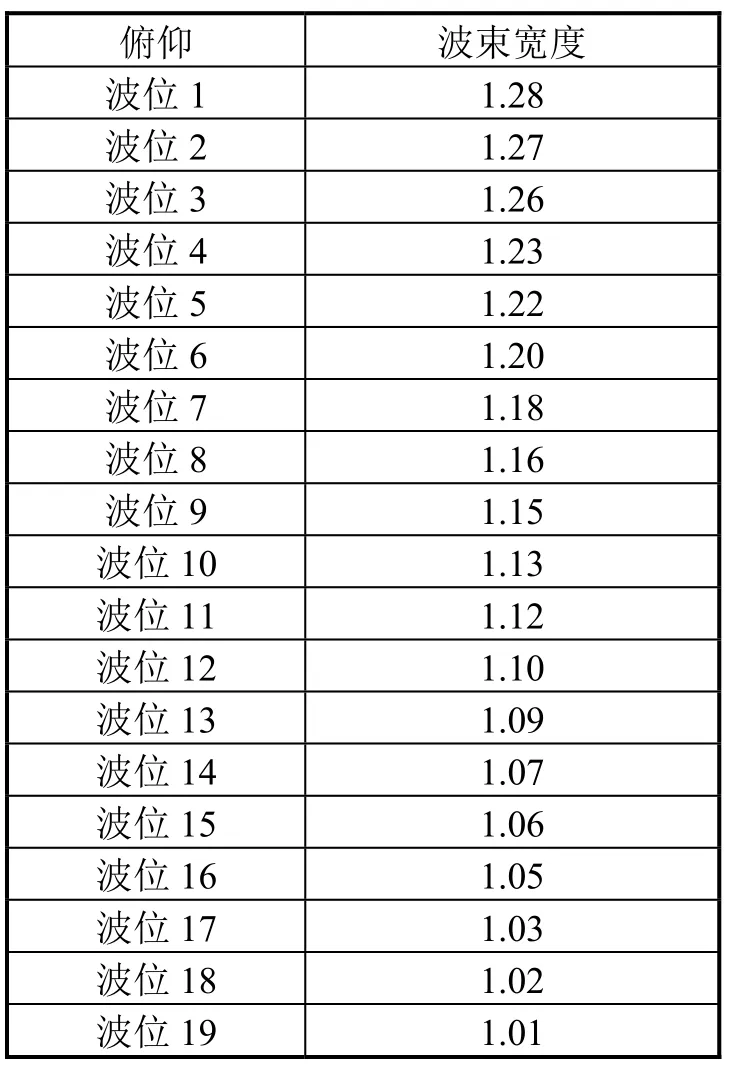
表1 雷达俯仰维波束宽度(单位:°)
对地探测波束需要按照波束上沿计算其最大探测斜距。如图4 所示,左侧为对地探测的探测距离,右半部分是对空探测的探测距离。
2 探测空域仿真计算分析
根据第1 节中的对空探测模型,进行典型场景下的模型量化仿真计算分析。
2.1 对空探测空域仿真
假设雷达典型架高为10 m、50 m、100 m、200 m,探测高度ht为1000 m,俯仰维波束宽度如表1 所示,则根据式(1)进行求解得到每个对空探测波束的探测距离,如表2 所示。表中仰角为每个俯仰波束中心与水平面夹角,架高为雷达的几种典型架设高度,距离为波束下沿与探测等高线的交点到雷达的探测斜距。
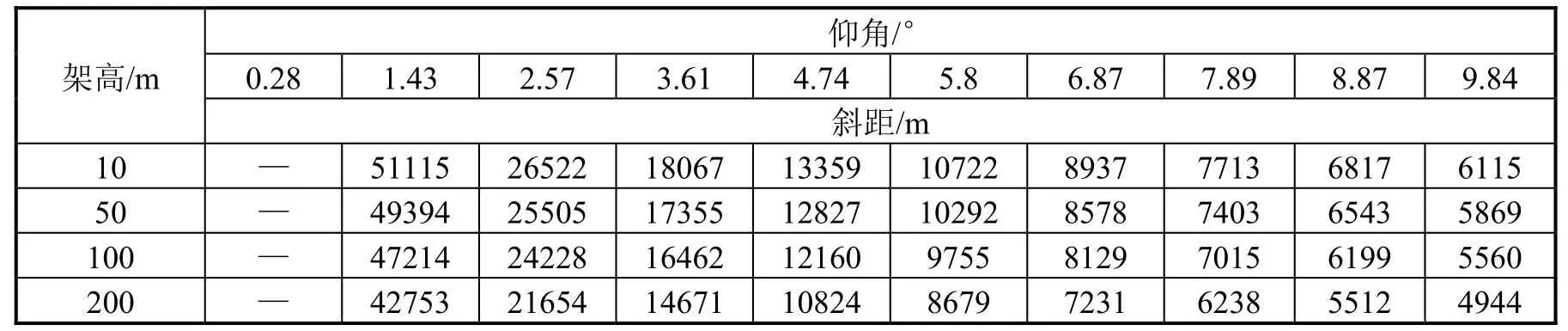
表2 对空探测波束探测距离计算值
从实际仿真计算结果可以看出:
(1)在同一架设高度下,随着仰角增大,探测斜距越来越小;
(2)随着雷达架设高度的增大,同一仰角波束的探测斜距越来越小;
(3)波位1(0.28°)由于波束下沿已是负角度,与探测等高线无交点,故无解,实际设计时按照最大探测距离进行设计即可。
2.2 对地探测空域仿真
假设雷达典型架高为10 m、50 m、100 m、200 m,则根据式(2)进行求解得到每个对地探测波束的探测距离,如表3 所示。表中仰角为每个俯仰波束中心与水平面夹角,架高为雷达的几种典型架设高度,距离为波束上沿与地面交点到雷达的探测斜距。

表3 对地探测波束探测距离计算值
从实际仿真计算结果可以看出:
(1)在同一架设高度下,随着仰角增大,探测斜距越来越大;
(2)随着雷达架设高度的增大,同一仰角波束的探测斜距越来越大。
2.3 脉冲重复周期精细化设计
脉冲重复周期T精细化设计需要同时满足以下准则:
(1)保证满足雷达探测覆盖范围要求,并适当留取时间余量;
(2)满足雷达最大工作占空比要求(对于脉冲雷达)。
根据探测空域要求,对每一个俯仰波束进行精细化设计工作重复周期。假设雷达发射脉宽τ=10μs,最大工作占空比要求η=20%,雷达指标要求对空目标探测最大距离为15 km,对地面目标探测最大距离为20 km。
根据第1 节可得到第i个俯仰波位的最大探测斜距Ri,则脉冲重复周期Ti需要满足如式(3)所示:Ti在满足上述条件的基础上,适当地增大取值,其中探测距离按不同架高条件取探测距离的极值进行计算。即对空按架高10 m 时的实际探测距离计算重复周期,对地按架高200 m 时的实际探测距离计算重复周期,以便确保不同架设高度下该方案的适用性。计算结果如表4 和表5 所示。

表5 架高200 m 对地探测波束探测量程与重复周期设计
仰角分成若干区间,对每一个区间设计一种波形和重复周期。这样既可以适当增加探测距离余量,也可以减少重复周期Ti的种类数目,降低设计复杂度。
上述设计用于实现雷达最大威力时的时间资源优化。对于时间资源的得益计算仅包含雷达搜索波形中的宽脉冲周期,不包含补盲脉冲周期以及收发切换时间。
2.4 时间资源得益分析
根据上述计算结果可看到,相比按照最大探测距离计算,多数波位的重复周期Ti明显缩小,如图5 和图6 所示。
图6中耗时比K为优化后重复周期T2与优化前重复周期T1的比值。
优化前雷达对覆盖空域进行一次搜索遍历所需的时间为2450μs(假设单周期驻留,19 个波位),优化后一次搜索遍历所需1455μs。可以看到优化后搜索时间为优化前搜索时间的60%,节省了40%的时间资源。
3 结论
文中提出了一种三坐标雷达探测空域和波形的精细化设计方法,通过对每个俯仰波位进行雷达工作波形参数优化设计,能够有效降低雷达搜索占用的时间资源,提高雷达搜索的数据率,对三坐标雷达的优化设计具有重要意义。
猜你喜欢
现代雷达(2023年11期)2024-01-05 15:01:52
电力勘测设计(2022年2期)2022-03-08 09:54:52
初中生世界·九年级(2020年2期)2020-04-10 06:47:22
中国惯性技术学报(2019年5期)2020-01-07 08:17:50
成都信息工程大学学报(2018年5期)2018-12-06 09:23:52
测控技术(2018年3期)2018-11-25 09:45:52
北京航空航天大学学报(2017年12期)2017-04-23 08:31:51
测绘通报(2017年2期)2017-03-07 09:58:46
科技视界(2016年15期)2016-06-30 12:48:10
浙江大学学报(工学版)(2015年12期)2015-07-11 10:10:22
