基于GPS/INS的自适应无迹Kalman滤波算法
2021-10-20 05:48曹红燕刘长明沈小林牛兴龙李大威陈燕
河南理工大学学报(自然科学版) 2021年6期
曹红燕,刘长明,沈小林,牛兴龙,李大威,陈燕
(1.中北大学 电气与控制工程学院,山西 太原 030051;2.陆军装备部驻北京地区军事代表局某军代室,山西 太原 030051)
0 引 言
随着科技发展,军队建设对武器的作战能力提出了更高的要求。在无人机作战系统中,姿态信息获取及其测量精度作为关键因素,一定程度上决定着战争的成败,因此,需要选择更合适的组合导航系统,获得更高精度的姿态信息。运载体的飞行导航主要分为自主性导航和非自主性导航两种[1],常用的导航系统有捷联惯性导航系统(INS),全球定位导航系统(GPS)。INS导航系统[2]不依赖于外部信息,能够长时间持续工作,可在一定速度和时间内提供完善的导航信息,对姿态等信息的测量精度高且稳定性好,但测量误差会随时间越来越大,导致对姿态角等信息的测量精度降低[3]。GPS导航系统可以实时工作,测得更加完整有时序性的信息[4],相比INS系统其在长时间连续工作时更加稳定,且精度更高。将GPS与INS系统结合构成组合导航系统,能够减小测量误差,弥补INS系统长时间工作精度降低的缺陷[5],并能解决GPS系统信号失真问题,对姿态角,位置等重要姿态信息的测量具有更高的精度,更好的抗干扰性[6]。
目前国外对姿态信息测量的研究已有很多,如S.Bezick等[7]将Kalman滤波与外部非惯性导航系统相结合进行数据处理,提高了导弹导航系统的对准技术和精度;DENG Z[8]针对纯惯性导航模式下的周期振荡误差,设计了捷联惯性导航系统的外水平阻尼网络,提出了基于外速度的水平阻尼算法,通过三轴转台和仿真实验验证了该算法的有效性。文献[7-8]对于单导航系统进行算法分析,虽有一定改进,但没有针对组合导航系统进行算法分析与改进。H.E.Soken等[9]处理GPS/INS组合导航中的数据时引入Kalman滤波算法,取得一定效果,但如果GPS测量的数据出现粗差,姿态信息的测量精度将会受影响。目前已有很多研究针对导航系统的Kalman滤波算法进行了改进,涉及到扩展Kalman、容积Kalman、无迹Kalman等。在GPS/INS系统中,存在很多干扰因素,如系统模型扰动,噪声误差等,如果不考虑这些方面影响,组合导航系统将会产生测姿定位错误,带来非常恶劣的影响[10]。
本文在GPS与INS紧组合的情况下,利用四元数法对无人机轨迹进行测姿,对姿态角的信息运用扩展Kalman滤波、无迹Kalman滤波和改进的算法进行处理,并对比结果,分析实验数据。在无迹Kalman滤波基础上,提出改进算法,对数据进行最优估计和误差补偿。
1 基础知识
1.1 主要坐标系
姿态测量应用的牛顿力学是在惯性空间条件下确立的,尤其是在潜艇、炮弹、航空航天以及机器人领域应用十分广泛[11]。正确的坐标系对研究物体的运动非常关键,坐标系的选择会影响姿态信息的测量。本文仿真计算及试验涉及到的主要坐标系如下。
(1)惯性坐标系(oxiyizi)。此坐标系Zi轴沿地球自转轴极方向,xi,yi轴在赤道平面内,分别指向空间中的两颗恒星[12]。
(2)地球坐标系(oxeyeze)。xe轴与格林威治子午线对准,ye轴位于东经90°,ze轴与地球自转方向一致,坐标系相对地心惯性坐标系以ωe=15.041 088°/h的角速率旋转[13],见图1。
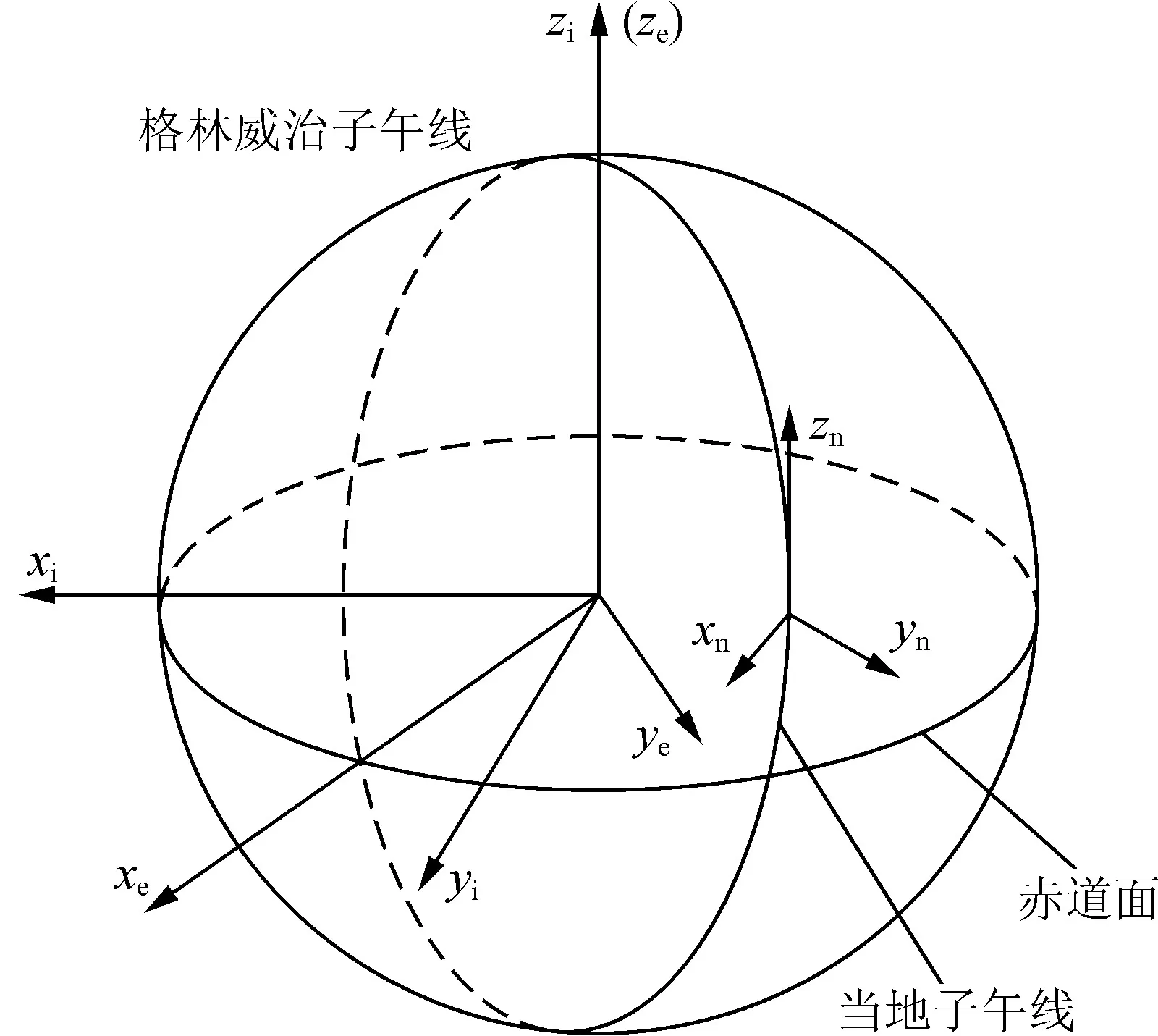
图1 地球坐标系
1.2 姿态角
导航坐标系(oxnynzn)经过三次旋转,可得载体坐标系(oxbybzb),转换示意图见图2,转换后生成的姿态角说明如下。
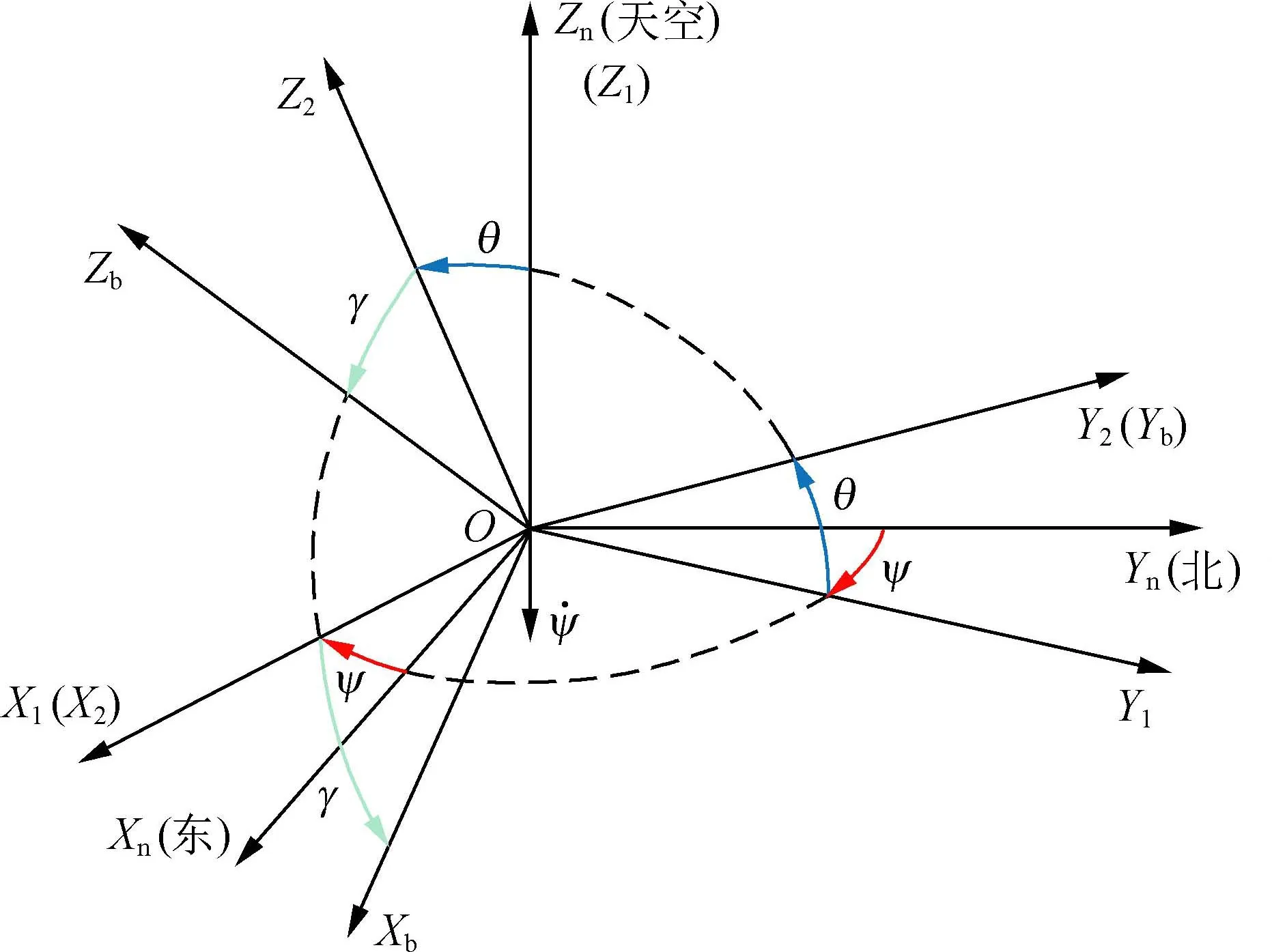
图2 导航坐标系与载体坐标系的转换示意
(1)航向角ψ。载体纵轴在水平面上的投影与地球经线的夹角[14],[0°~+360°]。
(2)俯仰角θ。载体纵轴和水平面的夹角[15],[-90°~+90°]。
(3)横滚角γ。载体横轴与水平面的夹角[15],[-180°~+180°]。
本文对姿态角的更新测量采用四元数法,用四维向量的形式表示姿态信息,主要计算过程为
Q=q0+q1ib+q2jb+q3kb,
(1)
式中:q0,q1,q2,q3为实数;ib,jb,kb为载体方向的单位矢量。
四元数微分方程为
(2)
其中,ω=0+ωxib+ωyjb+ωzkb,可得矩阵形式,即
(3)
1.3 扩展Kalman滤波
扩展Kalman滤波是以Kalman滤波为基础的一种次优估计,利用泰勒级数展开非线性函数,并对高阶项采用忽略或逼近措施的近似线性化方法[16],其中重要的计算过程如下。
非线性离散系统的状态方程和测量方程为
Xk=f(Xk-1)+Wk-1,
(4)
Zk=h(Xk)+Vk,
(5)
式中,Vk和Wk为高斯白噪声。
统计特性为
E[Wk]=qk,cov(Wk,Wj)=QkδkJ,
(6)
E[Vk]=γk,cov(Vk,Vj)=RkδkJ,
(7)
cov(Wk,Vj)=0。
(8)
初始状态X0独立于Wk,Vk,其中X0的均值和协方差分别为
(9)
P0=cov(X0,X0)=

(10)
将Xk-1展开成泰勒级数并保留一阶项,
(11)
扩展Kalman滤波算法展开后仅保留泰勒展开式的一阶项,但高阶项也会对数据融合结果产生一定影响,可参考因素的减少会导致结果的片面性,因此,该滤波算法是非线性函数局部线性化的结果[17],对于非线性化程度高的系统,随着时间推移,如果过程和测量噪声协方差估计不够准确,累积的误差会越来越大,测量精度越来越低,从而影响整个系统的工作。
1.4 无迹Kalman滤波
无迹变换是基于加权统计线性回归计算随机变量的后验分布[18],无迹Kalman滤波融合算法是在无迹变换下进行近似线性最小方差估计的方法[19],计算过程如图3所示,具体步骤如下。
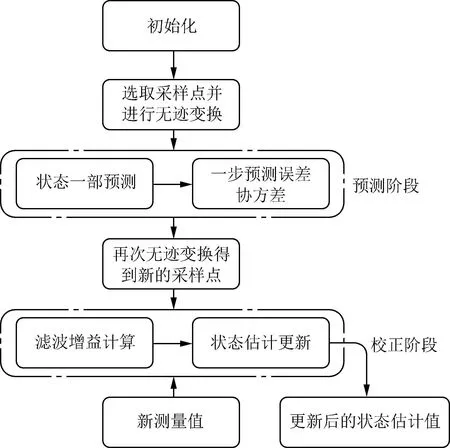
图3 无迹Kalman滤波计算过程
(1)初始化,初始状态为
(12)
(13)
i=1,2,…,n,
(14)

i=n+1,n+2,…,2n。
(15)
(3)对采样点集进行无迹变换,得到点集的预测方程为
Xi(k+1|k)=f(Xi(k|k),Wk)。
(16)
(4)进行加权处理,得到系统状态量的一步预测方程和协方差方程,分别为
(17)
(18)
(5)根据一步预测估计值再次进行无迹变换,生成新的采样点集,即

(19)
i=n+1,n+2,…,2n。
(20)
(6)根据非线性测量方程进行非线性变换,
Zi(k+1|k)=h(Xi(k+1|k),Vk),
i=0,1,…,2n。
(21)
(7)进行加权求和并计算系统的测量预测值,
(22)
(8)计算协方差PXkZk及输出变量的方差矩阵PZkZk,
(23)
(24)
(9)计算Kalman增益矩阵,
Kk+1=PXkZkPZkZkT。
(25)
(10)状态更新:
(26)
P(k+1|k+1)=P(k+1|k)-
Kk+1PZkZkKk+1T。
(27)
Kalman滤波、扩展Kalman滤波以及无迹Kalman滤波3种算法各有优缺点,标准Kalman滤波假设系统状态和测量的数学模型是线性的,在线性系统中,能够有效降低噪声影响,但在实际工程中,真正意义上的线性系统并不存在,同时状态和噪声不一定符合高斯分布,所以标准Kalman滤波不适用于非线性系统。
无迹Kalman滤波计算非线性分布统计量的精度至少可以达到二阶,在特殊采样策略方法下能够达到更高阶的精度,在算法运算过程中模型没有损失,精度较高,所以本文选择无迹Kalman滤波算法进行主要研究,并将结果与前两种算法进行对比分析。虽然无迹Kalman滤波比Kalman滤波和扩展Kalman滤波有一定的优势,但仍会受到高斯噪声约束,如果涉及到复杂的待测数据,需要对算法进行改进。本文主要在GPS与INS紧组合的情况下进行试验,具体的流程图如图4所示,在该框架下对新息噪声,状态预测,统计量的阈值几个方面进行改进,验证并对比算法结果,流程图见图4。

图4 紧组合系统工作流程图
2 改进算法
2.1 新息噪声改进
在无迹Kalman滤波的变换中,sigma点集根据系统方程和测量方程计算状态估计和误差协方差阵,其中涉及到系统噪声和测量噪声的协方差阵Q′,R,这些噪声的状态属性值已知,均为预先设定的高斯白噪声,但是实际与理论的噪声不相符,Q′和R在算法运行中是实时变化的,存在一定偏差,随着时间累积容易造成滤波器的发散。针对这个问题,目前有学者提出了衰减记忆算法、模糊自适应算法等。衰减记忆算法主要引用衰减因子控制滤波器的发散,但测量精度大大降低。模糊自适应算法主要通过设定一个模糊推理系统预测噪声的方差值,适用于较弱的噪声,当噪声很强时,对数据的预处理较复杂。
为了解决此问题,本文的第一个改进是对系统噪声协方差Q′和测量噪声协方差R在线估值。观测新息矢量包括GPS位置、速度与校正后的INS位置、速度的差值,
eZk=Zk-HkXk|k-1。
(28)
计算最后N个观测新息的协方差,N为自适应窗口,取值可变,即
(29)
(30)
(31)
将式(30)和(31)分别代入式(18)和(24)中重新计算,在线估计噪声的统计特性,将系统噪声和测量噪声改进算法与导航系统融合。
2.2 状态预测改进
本文的第二个改进是对状态预测协方差矩阵引入次优渐消因子λk,改进后的无迹Kalman对状态预测协方差引入的次优渐消因子确定不需计算雅克比矩阵,具体计算过程如下。
(32)
(1)新息向量为
(33)
(2)次优渐消因子λk按式(35)求取,
(34)
(35)

(36)
(37)
(4)改进的状态测量预测协方差为
(38)
(5)对式(38)两边求迹,可得次优渐消因子:
(39)
(6)最后取值为
(40)
2.3 统计量阈值改进

(41)


图5 计算流程图
3 算法验证及结果分析
为了对比算法结果,验证有效性,本文将GPS系统和INS系统进行紧组合,在此框架下进行算法验证和MATLAB试验仿真,设计一段无人机飞行轨迹,计算陀螺仪和加速度计的数据信息,模拟各自的误差,与理想的惯性参数拟合在一起,解算出需要的姿态信息,利用本文所述的数据改进算法对数据进行处理,表1是本文试验的初始状态信息。
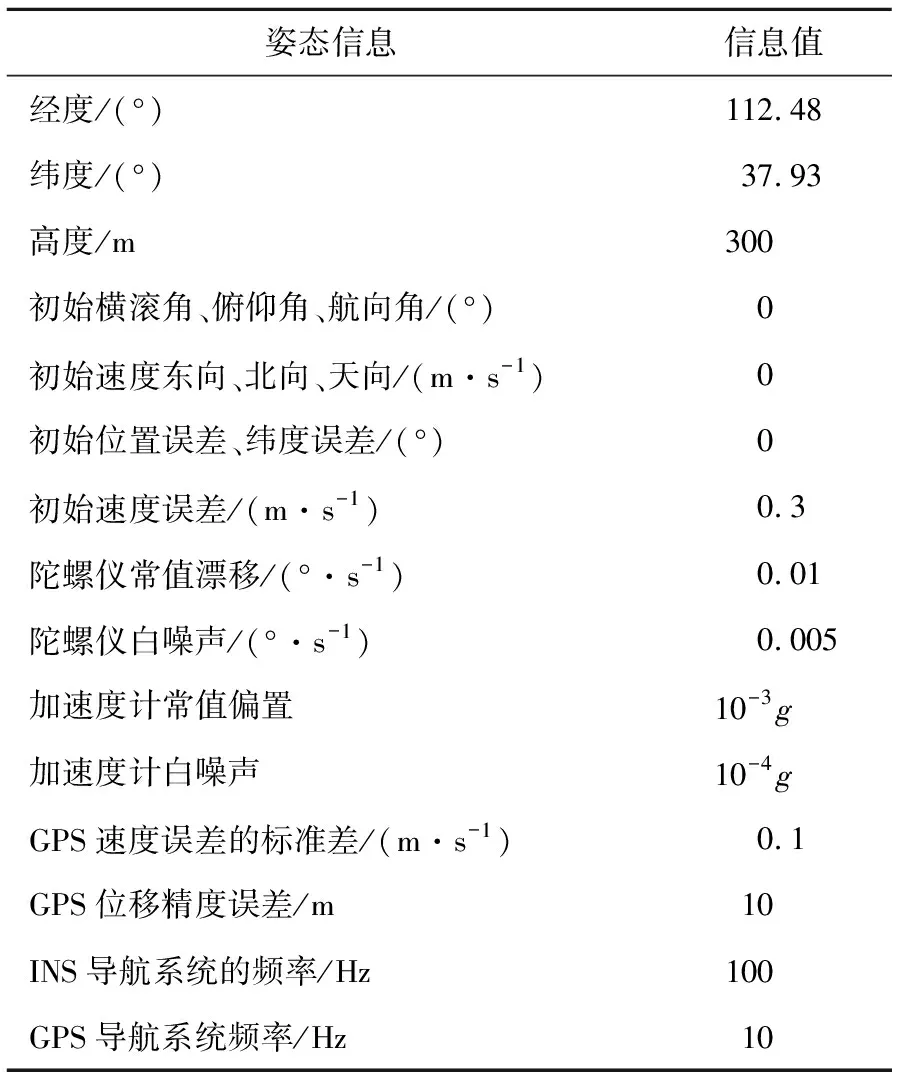
表1 初始状态
MATLAB仿真的无人机飞行航线轨迹如图6所示。
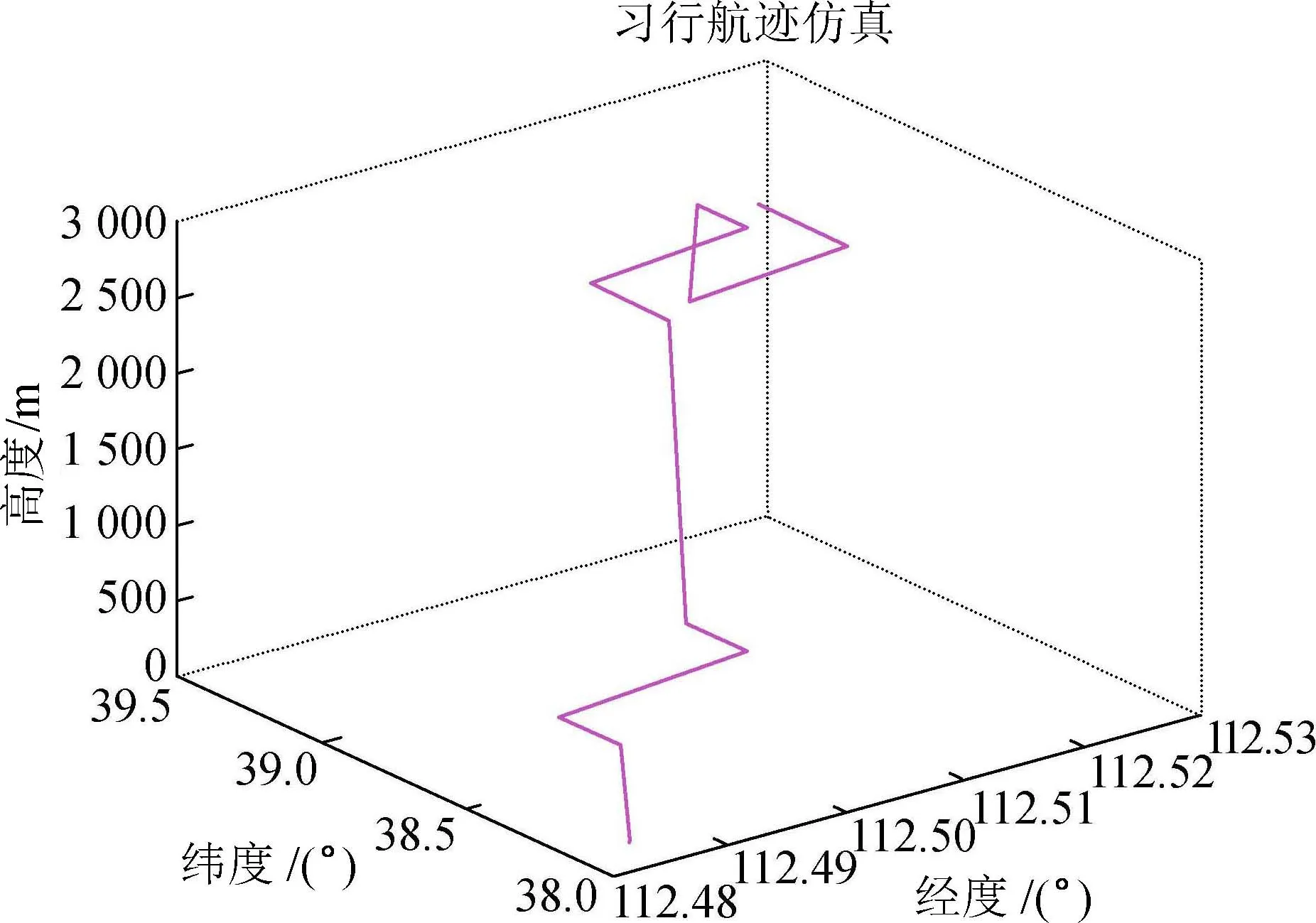
图6 总体航迹图
紧组合情况下,INS系统和 GPS系统互相独立工作,通过数据融合算法对其进行校正,图7~9是运用紧组合的导航模式对无人机姿态角进行测量并用扩展Kalman算法、无迹Kalman算法及改进的滤波算法处理数据的误差曲线。
由图7可知,紧组合导航系统测得的姿态角与真实姿态角的误差减小,俯仰角误差为-1°~6°,航向角误差为0°~6°,横滚角误差为-4.5°~0.5°。

图7 Kalman滤波算法补偿后姿态角的误差曲线
由图9可知,红色曲线为无迹Kalman滤波数据融合后的误差,黑色曲线为改进算法数据融合后的误差,两种算法都能将误差减小,比扩展Kal-man滤波后的精度高,在200 s左右姿态角绝对收敛,姿态角精度均高达0.1°,并在50 s之后绝对收敛,收敛性强于无迹Kalman算法,相比之下,改进后的算法抑制随时间漂移误差的能力更强,姿态角的精度更高。
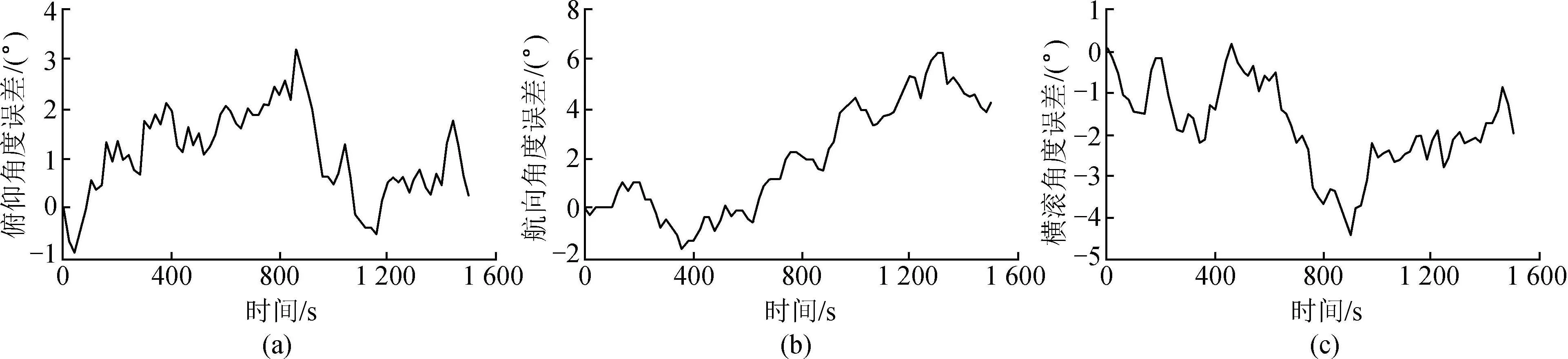
图8 扩展Kalman滤波补偿后姿态角的误差曲线

图9 无迹Kalman滤波及改进算法补偿后姿态角的误差曲线
4 结 语
使用常规Kalman滤波器对组合导航系统状态进行估计时,需先给定系统噪声和测量噪声的统计特性,但在实际物理过程中,无法确定噪声统计特性。针对此问题,本文提出了一种自适应无迹Kalman滤波算法,利用观测新息协方差对噪声统计特性在线估计,对状态预测引入渐消因子,重新计算状态值。以紧组合导航系统为背景,使得INS与GPS两个系统的优点缺点互补,满足了动态性能和抗干扰能力的需求,提升导航定位的精确性。运用3种滤波算法进行补偿分析,由结果可知,无迹Kalman和改进的算法测姿精度大于扩展Kalman滤波,有效抑制了INS系统误差随时间积累的现象,弥补了GPS的动态误差缺陷,本文的改进算法收敛性更强,稳定性更好,测姿精度更高,为了提高算法的实时性,保证算法的可用性,使算法具有说服力,未来会继续对算法进行改进,并将其应用于实物测试,获得更有效的数据。
猜你喜欢
导航定位学报(2022年2期)2022-04-11
苏州科技大学学报(自然科学版)(2021年1期)2021-03-24
舰船电子工程(2020年3期)2020-06-11
北京航空航天大学学报(2019年9期)2019-10-26
电子制作(2019年9期)2019-05-30
数学大世界(2018年1期)2018-04-12
科技视界(2018年3期)2018-04-02
考试周刊(2018年15期)2018-01-21
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
考试周刊(2016年54期)2016-07-18