基于物流分拣循迹车的设计
2021-10-19 04:38陈钊庆范祥祥
湖州师范学院学报 2021年8期
陈钊庆,范祥祥
(1.湖州师范学院 信息工程学院,浙江 湖州 313000;2.杭州电子科技大学 自动化学院,浙江 杭州 310018)
随着人们生活质量的提高,网购已融入人们的日常生活.2019年前5个月的数据统计显示,我国网上零售额达3.86万亿元,在社会消费品零售总额中的占比超1/5,大量的配送货物使得配送中心的货物分拣任务量庞大[1],人工操作已无法满足大规模的分拣需求,自动分拣势在必行.目前,京东等大型网商已大规模普及循迹车自动分拣,其中最关键的就是循迹车的设计实现.
循迹车通过轨道在不同工位之间进行货物转换,以减少分拣过程中的人工作业.当工位需要做出改变时,循迹车只要改变循迹线路即可.本文以自主循迹车为研究对象,通过分析设计以实现循迹车自主通过直道、弯道、十字道等复杂路线,且能自行躲避道路上的掉落物,并在循迹轨道磨损消失后通过备用方案进行循迹,以避免系统瘫痪.该设计可以提升整个分拣流程的效率和可靠性.
1 总体设计
本设计的系统结构如图1所示.利用灰度摄像头对循迹轨道图像进行分析,提取轨道中线;通过红外测距模块进行测距,以避开掉落在轨道上的货物;通过电感谐振获取轨道电磁信号,当碰到轨道磨损较大无法使用摄像头分析时,自动切换为电磁信号循迹;由编码器获取循迹车实时速度,并采用PID控制算法控制速度,以提高系统的稳定性.

图1 系统结构框图Fig.1 Diagram of system structure
2 硬件电路设计
系统整体硬件设计主要从系统的稳定性、可靠性、高效性和成本等方面考虑,采用LPC54606J512单片机作为主控芯片(图2).此单片机原生主频可达180 MHz,其运算速度等多种性能均优于传统的STC89C52、STM32等系列单片机,且价格相对更低[2].
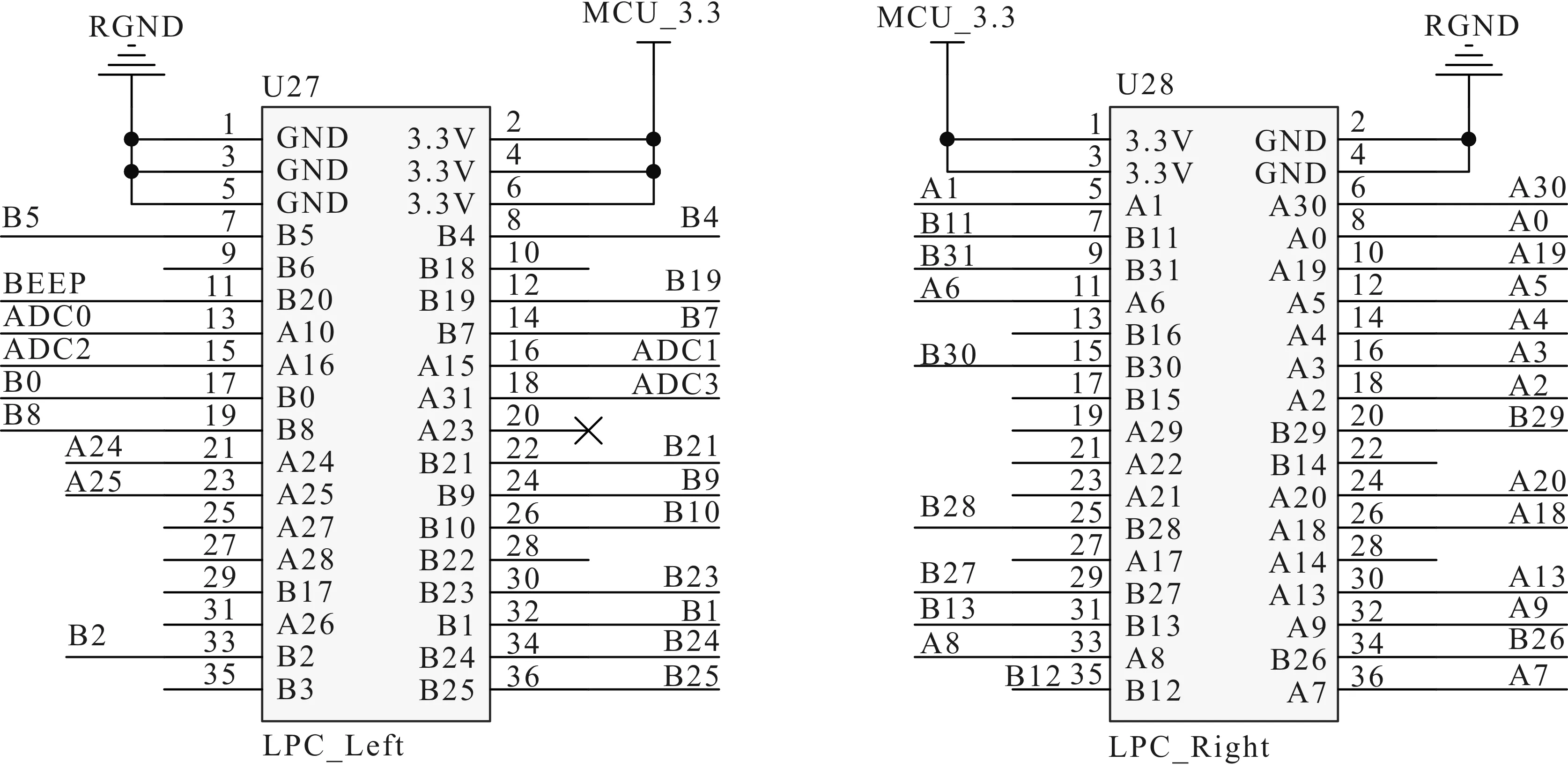
图2 系统主控芯片电路原理图Fig.2 Schematic diagram of master chip in the system
2.1 电机驱动模块
图3为电机驱动模块与编码器模块原理图,电机驱动采用全桥驱动.专门设计的栅极电路可以增加MOSFET的开关速度,从而提升PWM控制的调制频率,使电机发挥出更强的动力.专用栅极驱动芯片具有防同臂导通、硬件死区、欠电压保护等功能,可以提升电路工作的稳定性和可靠性[3].编码器选用512线编码器,利用官方提供的程序库中的正交解码功能实现速度与转向方向检测.

图3 电机驱动模块与编码器模块电路Fig.3 Schematic diagram of motor drive and encoder module
2.2 循迹与避障模块
图4为循迹与避障模块原理图.电感信号的放大选择OPA189芯片,以构建反向放大器.在运放输出部分,采用检波电路将输出的交流信号转化为直流信号,增加二阶滤波,以提升输出电压信号的稳定性.摄像头采用逐飞科技的总钻风,以更好地获取动态图像,即使在较快的车速下,也可以呈现一幅高品质图像.避障模块选用红外测距模块,传感器输出电压与距离呈线性关系,获取到的电压值通过公式计算即可得到与探测物体的距离.

图4 循迹与避障模块电路Fig.4 Schematic diagram of tracking and obstacle avoidance module
2.3 电源管理模块
图5为电源管理模块原理图.由于不同模块需要的电压不同,且整车仅有一个电池输入的7.2 V电压,故需通过对7.2 V进行升降压变换来适应不同模块的电压需要.采用LM2940芯片产生的5 V电压给测距模块供电,LM2941芯片产生的5.5 V电压给舵机供电,MC34063和B1212S-1W芯片产生的±12 V电压给运放供电,AMS117-3.3芯片产生的3.3 V电压给MCU摄像头供电.为防止电源输入的纹波波动对摄像头模块造成影响,将MCU与摄像头模块分开供电[4].
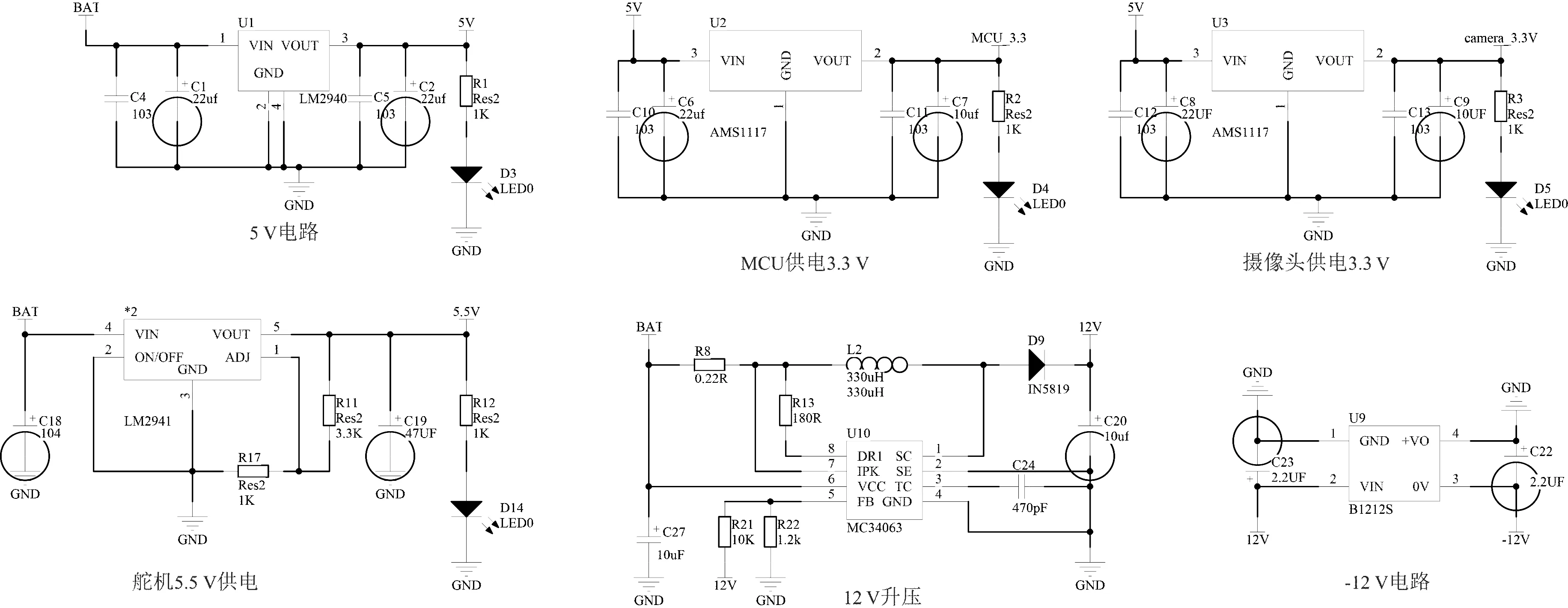
图5 电源管理模块电路Fig.5 Schematic diagram of power management module
3 系统程序设计
主程序流程如图6(a)所示.系统初始化后,首先分析图像,将获取的图像经过二值化处理,通过判断前方黑色像素点的个数,以及通过红外测距模块获取的距离综合判断前方轨道是否存在掉落货物,若存在则执行避障子程序.然后判断轨道清晰度,同样通过黑色像素点个数及红外测距模块综合判断,若轨道磨损严重,获取的轨道信息有限,则采集电感电压数据,使用电压信号循迹.若以上都不满足,说明轨道状况良好,则可运用边缘二值化进一步处理图像,获取循迹车此时所处的位置与轨道中线所偏离的程度,通过PID控制算法来调节车的位置[5],使其在轨道上快速地运送货物.

图6 主程序流程图(a)和图像处理子程序流程图(b)Fig.6 Program flow diagram of the system(a) and image process(b)
在电感电压采集子程序中,由于电感采集回来的值会受到干扰,为得到理想数据,需要对采集的数据进行滤波及归一化处理.滤波采用平均滤波、中位值滤波和限幅滤波,以克服由于偶然因素造成的干扰,减少电感值波动的干扰[6].利用归一化算法将电感值归一化至1~100之间,使电感波动范围变小.
对避障子程序,首先给舵机PWM信号,使其驶出轨道;当红外测距检测到前方大于50 cm时,代表已偏离轨道,随后再次给舵机PWM信号,使其回到轨道;最后判断图像中白色像素点的个数,当图像中间行的白色像素点个数大于10个时,则表示回到轨道,随后结束避障子程序.
图像处理子程序如图6(b)所示.系统采用灰度摄像头,虽然摄像头会产生梯形失真,但在实际过程中对图像影响甚微,故未进行图像校正.程序上采用隔列处理法,即仅处理所获取的60×180分辨率图像中的60×90个像素点,以减少单片机的运算压力[7].为搜索轨道的边缘,首先使用迭代阈值法获取阈值,随后根据阈值与像素点间的灰度差值进行综合判断,使获取的边缘更加准确,以抑制图像噪声.由于小车近处的图像稳定,远处的图像略有失真,故使用由近及远的方法来处理图像,提取最近3行的黑白跳变点确定近处道路的边缘.由于轨道的连续性,因此可以根据上一行的边沿位置确定下一行的边沿点.全部获取完成后,根据边沿点计算出轨道中线位置.由于轨道元素复杂,仅通过边沿获取的中线可能拟合程度较差,尤其在弯道处,易存在单边边沿丢失的情况,基于此,可采用增加矫正数组的形式来修正曲线.当判断得出单边丢边沿线情况后,可不再采用中点(左边界+右边界)/2获取,而采用对未丢边沿线的一边增加或减去矫正数组来获取.此时中线的线性大幅增加,总体变化平缓,PID算法作用更加有效,小车运行更加稳定[8].获取的图像信息及拟合中线如图7所示.

图7 轨道图像处理效果图Fig.7 Picture of the track image processing
4 设计结果
循迹车的整体设计效果如图8所示.此循迹车将灰度摄像头传感器和红外传感器放置在车前,电感放置在碳素杆上并固定.车中部由电池及主控电路板组成.在后方,车的编码器通过齿轮传递连接至电机,以获取电机转速.所设计的电机驱动板可给电机提供强大的动力.

图8 循迹车实物图Fig.8 Picture of the tracking car
如图9所示,系统的运行共分3种情况:(a)为轨道获取正常,小车在轨道上正常行驶;(b)为当前方轨道出现掉落货物时,MCU控制舵机转角使小车避开货物;(c)为当轨道前方图像特征不够清楚时,小车降速并使用电感循迹通过磨损路段.经过多次重复实验,小车的平均车速可达2.4 m/s,可以提前50 cm检测到障碍物,并立即转向通过障碍物,所花费的时间约为2 s.

图9 循迹车运行效果图Fig.9 Running effect pictures of the tracking car
5 结 语
本文根据未来智能化的发展,采用LPC系列单片机为主控,通过摄像头、电感电磁感应的方式循迹,并采用红外测距模块测得距离并避障,采用PID控制算法来调节车速和方向,以实现多因素耦合循迹的循迹车系统.该循迹车可代替人工分拣货物,大大提升分拣效率.随着快递行业的飞速发展,此产品的未来经济效益非常可观.
猜你喜欢
导航定位学报(2022年4期)2022-08-15
湘潭大学自然科学学报(2022年2期)2022-07-28
合肥工业大学学报(自然科学版)(2021年11期)2021-12-10
现代电子技术(2021年1期)2021-01-17
科学(2020年3期)2020-01-06
汽车与驾驶维修(维修版)(2019年4期)2019-05-09
微型电脑应用(2019年1期)2019-01-23
电脑知识与技术(2018年35期)2018-02-27
电子制作(2017年7期)2017-06-05
电子制作(2017年1期)2017-05-17