
基于BP网络的字符识别算法
2021-10-18 08:13王汝心马维华
现代计算机 2021年24期
王汝心,马维华
(南京航空航天大学计算机科学与技术学院,南京210016)
0 引言
字符识别应用于多个领域。常用的字符识别方法包括基于模板匹配[1-2]、基于特征分析匹配[3]和基于机器学习[4-6]。字符特征有网格像素统计、正交投影法、骨架特征等方法,但这些特征提取方法各有侧重,具有局限性,当字符相似时识别效果较差。随着机器学习算法的研究进展,机器学习算法被越来越多的应用到字符识别领域。孙国栋、江亚杰等使用训练好的BP(Back Propagation,反向传播)网络对图像全局阈值进行预测并二值化,达到分离重影的目的,并采用改进LeNet-5网络完成字符识别[4]。呙润华、苏婷婷等通过总体密度、分块密度等特征表达不同字符的差别,以减少后续工作的计算量,将模板匹配方法嵌入到收敛的BP神经网络中,在提高系统的计算效率、缩短运行时间的同时提高了字符识别效率[6]。
本文将骨架提取与BP网络相结合,在细化图片、保留原字符特征的同时引入字符图片中更多的特征,优化BP网络,以提高对尺寸偏小的图片的识别准确度和精确度。
1 特征提取
1.1 骨架提取
骨架提取(image skeletonization)是实现二值图像细化(image thinning)的运算方法之一。当图像本身尺寸偏小、或者当字符图案在图片整体中所占区域过小时,进行字符分割后获得的字符图片往往像素点偏少,导致提取特征时能够提取的特征向量个数也会随之减少,因而会对字符识别结果造成影响。对图片中的字符笔画进行细化,提取字符的骨架,从而在不改变字符的轮廓特征的同时,突出字符与字符之间的细微区别
对一个二值图像而言,骨架可以理解为图像的中轴,它是一种细化结构,描述了目标的拓扑结构。细化过程就是将图像中的像素点剥离,图像有规律地缩小,在保持原图案形状的基础上,逐步删除原图像中的部分像素点,直到获得图像的骨架。
保证图案形状不变,应保证图像的连通性质不变,减少线条相交处的畸变,在细化过程中,应判断一个点p1是否能去掉时,应参考该点的相邻8个点的情况。在这9个点中,只有当p1不是内部点、且不是端点、且不是固定点、且是边界点、且去掉p1后,如果连通分量不增加时才可删除p1点。
如图1所示,当p1周围的8个点满足图1(b)、(c)、(d)中任意一种情况时,p1点都不能删除。
根据以上条件可以推导出,对于图像中的任意像素点p1,只有同时满足以下4个条件时才能将p1点删除:
(1)f(p)=p2+p3+p4+p5+p6+p7+p8+p9,则f(p)应满足2≤f(p)≤6。
结合图1可知,当p1为孤立点时,f(p)的值为0;当p1为端点时,f(p)的值为1;当p1为内部点时,f(p)的值为7或8。由此得出,当2≤f(p)≤6时,排除了p1点是端点、孤立点或内部点的可能性。
(2)在序列{p2,p3,p3,p4,p4,p5,p5,p6,p6,p7,p7,p8,p8,p9,p9,p2}中,0,1的数量为1,以保证图片的连通性不发生改变。
(3)p2*p4*p8=0或者A(p2)≠0,其中A(p2)表示p2周围8邻域的0,1的数量,以保证2个像素宽的垂直区域不完全被腐蚀掉。
(4)为了保证2个像素宽的水平区域不完全被腐蚀掉,应满足条件p2*p4*p6=0或者A(p4)≠0,其中A(p4)表示p4周围8邻域的0,1的数量。

图1细化条件
1.2 HOG提取
为了减少计算复杂度、时间消耗和空间消耗,对分割好的字符图片进行分析,从大量数据中提取中关键信息转换为若干特征。本文通过提取字符的HOG特征,在描述目标特征的同时获取分布向量。
提取HOG特征共分5步:
(1)分割图像为2×2像素的连通区域;
(2)采集连通区域内的像素点,通过垂直梯度算子[- 1,0,1]T,水平梯度算子[- 1,0,1]提取像素点的水平和垂直梯度。
(3)计算水平和垂直方向的合梯度,包括幅值和方向。
(4)以2×2个连通区域为一个block,将block中的HOG向量拼接并归一化。
(5)滑动步长设定为1个像素,计算图像整体的HOG特征向量。
2 BP分类器
2.1 BP网络构建
BP神经网络分为两个过程:将输入信息正向传递,完成一次训练过程;将实际结果和预测结果的误差反向传播,修正各层的权重。Robert Hecht-Nielsen曾提出万能逼近定理,证明了包含一个隐藏层的BP网络可以用于拟合任意闭区间内的连续函数。换言之,假设单个样本具有m个样本特征、n个输出向量,一个包含输入层(I)、隐含层(H)、输出层(O)的三层的BP网络就可以完成任意的维到维的映射。当m=3、n=3时,BP网络如图2所示。
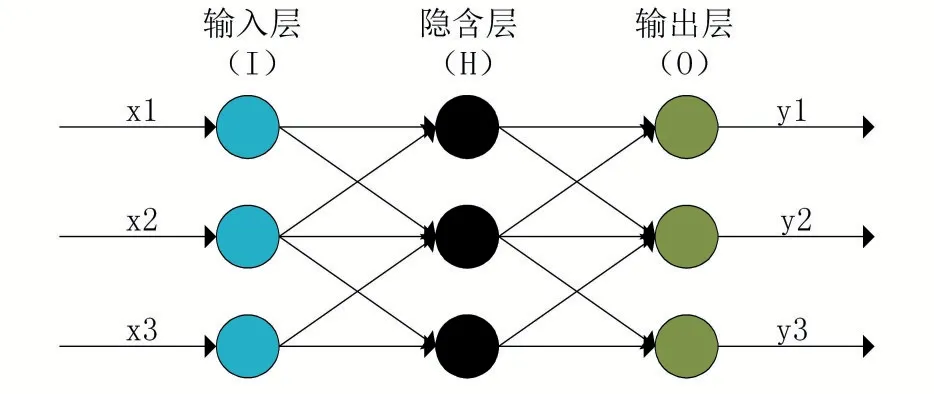
图2 BP网络
假设有a个训练样本,那么对于第p个输入,输入向量为Ip=(ip1,…,ipm)T,目标输出向量Tp=(tp1,…,tpm)T,最终输出向量表示为Op=(op1,…,opm)T。以wij表示输入向量第j(j=1,2,…,m)个分量到输出向量的第i(i=1,2,…,n)个分量的权重。则第p个输入下输出方差为:

其中,p=1,2,…,a。则网络总误差如公式(2)所表示:
根据梯度下降法和Widrow-Hoff规则,连续调整网络的权值和阈值,wij应沿着相对误差平方和方向,权值矢量的修正值和当前位置上的E的梯度成正比,则对于第j个输出节点,有:

重复上述过程,以修正各层神经元之间的连接权重,使得期望输出值在误差阈值的允许范围内。
2.2 BP网络优化
由于BP网络中的极小值较多,易于陷入局部极小值,而无法获得全局最优值。所以通过以下方法优化BP网络。
(1)多次随机训练,选择使训练后效果最好的初始值。在依据误差函数进行BP网络训练以得到最小误差的过程中,需要以初始值为基础和起点,所以初始值决定了BP网络的收敛方向。并采用退火思想允许E按照一定概率上升,从而减少BP网络陷入局部最小值的可能性。
(2)增加动量项∝。通过增加动量项,增大搜索步长,从而加速算法收敛,同时可以降低BP网络对误差曲面局部区域的敏感性。根据BP网络的思想,第n-1次的迭代结果影响力第n次迭代中,神经元之间的权值更新,所以在迭代过程中采用公式(4),其中动量因子∝一般选择0.1~0.8。

(3)自适应调节学习率。学习率的大小影响了BP网络的收敛快慢和训练成果。当学习率取值较小时,训练更容易稳定收敛,但取值过小会导致BP网络训练时间变成、运行速度降低等问题;当学习率取值较大时,可以加速收敛,训练结果可能震荡发散。因此,为了选择合适的学习率,应采用自适应方法调节取值大小。
(4)通过优化隐含层数和隐含节点数目完成网络结构优化。若隐含节点过少,可能导致精度降低;若隐含节点过多,虽然能提高精度,但由于网络结构过大导致BP网络性能下降。艳霞、李禹生等曾就隐藏节点数目与BP网络性能之间的关系进行实验,结果表明,当隐藏节点数目为取20~40时BP网络性能更好[7]。
3 性能评估
隐藏层选择Sigmoid型函数作为变换函数,隐藏层节点设置为30个,采用自适应学习算法,目标误差设置为0.001,或执行30次迭代训练。将样本数据集进行骨架提取,所得结果图片作为BP网络的训练数据集。获得迭代次数和识别正确率的数据后,将隐藏层节点设置为40个和50个。在图3中,展示了迭代次数、识别正确率、节点个数三者之间的关系。
从图3可以看出,第一次学习迭代的识别正确率普遍较低,在第10次迭代之前,正确率的波动较大。在第10次迭代之后,正确率趋于稳定。在多次迭代、正确率稳定后,当隐藏层节点设置为30个时,平均正确率为93.88%,最大正确率为94.36%;隐藏层节点设置为40个时,平均正确率为94.23%,最大正确率为95.06%;隐藏层节点设置为50个时,平均正确率为95.20%,最大正确率为95.60%。
综合考虑迭代次数的多少、隐藏层节点数目和网络结构复杂度等因素对训练结果、训练时间的长短的影响,设置隐藏层的神经元个数为50个,令BP网络迭代训练30次。
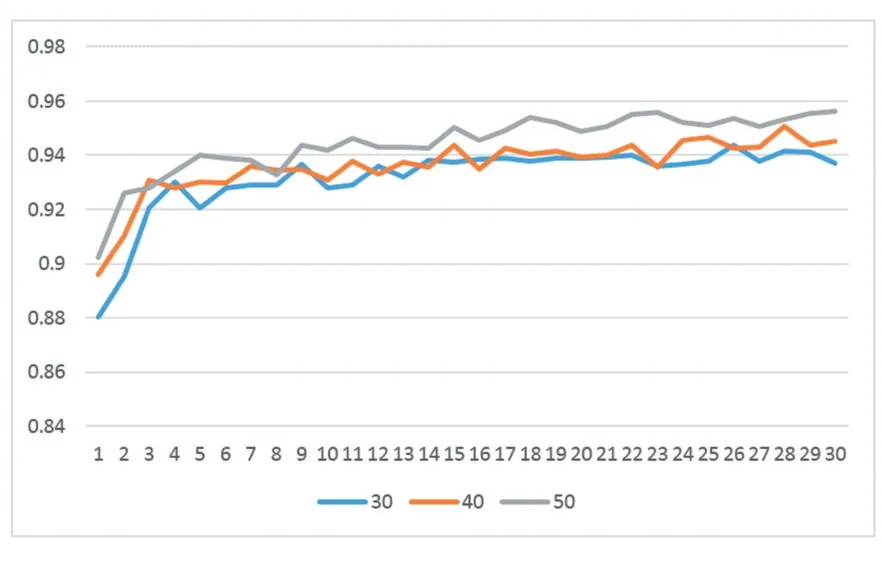
图3迭代次数与正确率之间的关系
将测试样本数据集进行骨架提取,将所得结果图片作为BP网络的输入,得到字符识别结果,并对识别结果进行统计,以测验BP网络对低像素图片的识别效果,得到BP神经网络对骨架提取后的字符图片进行识别,正确率为95.55%。将识别错误的图片经过图像细化、HOG特征提取后,通过BP网络进行识别,正确率为95.65%。
4 结语
本文通过分析低像素图片的特征,将二值图片的骨架提取与BP神经网络相结合。通过骨架提取细化图片中的字符图案,判断像素点是否应删除的依据,并进行HOG特征提取。构建BP网络,并对BP网络进行优化,完成对低像素图片识别算法。对BP网络进行训练,对隐藏层节点个数、迭代次数和识别正确率进行统计和分析,迭代次数为30次,隐藏层节点个数为50个。将测试样本数据进行图片细化,通过BP网络进行识别,正确率为95.55%。
猜你喜欢
电子乐园·上旬刊(2022年5期)2022-04-09
电子乐园·上旬刊(2022年5期)2022-04-09
电脑报(2021年41期)2021-11-04
发明与创新·大科技(2020年6期)2020-06-22
电脑知识与技术(2019年29期)2019-12-16
电脑爱好者(2019年8期)2019-10-30
现代电子技术(2018年18期)2018-09-12
软件导刊(2018年4期)2018-05-15
电脑知识与技术(2018年35期)2018-02-27
科学家(2017年12期)2017-08-10
