机器学习算法在自动驾驶系统中的应用
2021-10-17 10:02刘双霞
中国水运 2021年9期
刘双霞


摘 要:自20世纪初,随着人工智能的迅速发展,“自动驾驶”汽车也被雄心勃勃的工业巨头提出,作为新世纪科技时代的一大重要工业改革。从2005年DARPA挑战赛以来,基于车辆智能化的自动驾驶,进入快速发展期。从互联网巨头到传统汽车企业纷纷投入巨资,试图引领这场出行技术的革命。本论文将概述自动驾驶这一方兴未艾的应用领域,并介绍机器学习算法在自动驾驶汽车领域发挥的作用及其实现原理。
关键词:自动驾驶;机器学习;算法
中图分类号:U471.1 文献标识码:A 文章编号:1006—7973(2021)09-0148-04
1自动驾驶汽车研究现状
1.1 研究背景及其国内外研究现状
21世纪已经到了一个科技迅速爆发的时代,无人驾驶新能源汽车[1]更是如火如荼地发展,2016年7月,宝马、英特尔、mobileye正式宣布将与宝马共同合作开发一款无人驾驶新能源汽车,优势相得而补,各有所需,也大大减少了政府筹措用于发展自动驾驶技术[2]的资本、人才对自己主营业务的冲击。2016年福特作为目前中国所有传统的智能车企中唯一的最后一家从迭加替代式自动安全驾驶智能汽车硬件扩充至第二代智能汽车硬件生产商,然而它的自动安全驾驶智能汽车硬件产品能力相比特斯拉而言却确实要微弱得多。从现阶段国内的汽车智能无人驾驶产业市场总体分析情况来看,现代中国的智能无人驾驶这一技术发展起步较晚,它的L2和以及L3阶段均落后于欧美,但在L3和L4阶段却明显地呈现有所加速赶超之势,随着国内国外诸如百度等众多科技公司及其龙头企业在现代中国汽车智能无人驾驶这一关键技术发展方向上的深入研究和产业布局,智能无人驾驶这一技術已经逐渐获得更多国家政策上的支持。
1.2自动驾驶汽车的发展历程
自动驾驶的级别划分主要包括两套标准:一套由美国高速公路安全管理局制定的,一套由SAE International制定的。专业分级[3]定义如下:
L1驾驶员辅助:基本相当于人工驾驶,应其只是依赖不太灵敏的辅助功能来辅助驾驶。
L2部分自动驾驶:部分自动驾驶是当乘车人员在接受到车身发出的警告时没做出相应的应急动作时,部分驾驶汽车就会及时启动驾驶系统,做出应急操作[4]。
L3条件下的自动驾驶:该阶段的自动驾驶车辆就是在对驾驶员进行监控的条件下,让这辆汽车能够自动地控制其行驶方向和车辆的行驶速度。
L4高度自动驾驶:该阶段的自动驾驶汽车是指即使在没有驾驶员监视的情况下,汽车也可以自动改变汽车的行驶路径及行驶速度。
L5完全自动无人驾驶:汽车是自动驾驶汽车无人驾驶的一种非常理想驾驶类型和一种形式,乘客不仅仅只是需要为他们自己提供一个汽车目的地,无论在任何的恶劣路况,任何的恶劣天气,车辆都一样可以轻松实现完全自动汽车驾驶。
2自动驾驶汽车的组成及优缺点
2.1硬件组成
无人驾驶汽车的硬件[4]组成主要包括车身各个模块的传感器系统、摄像头系统、供电系统、启动系统,具体组成如图所示:
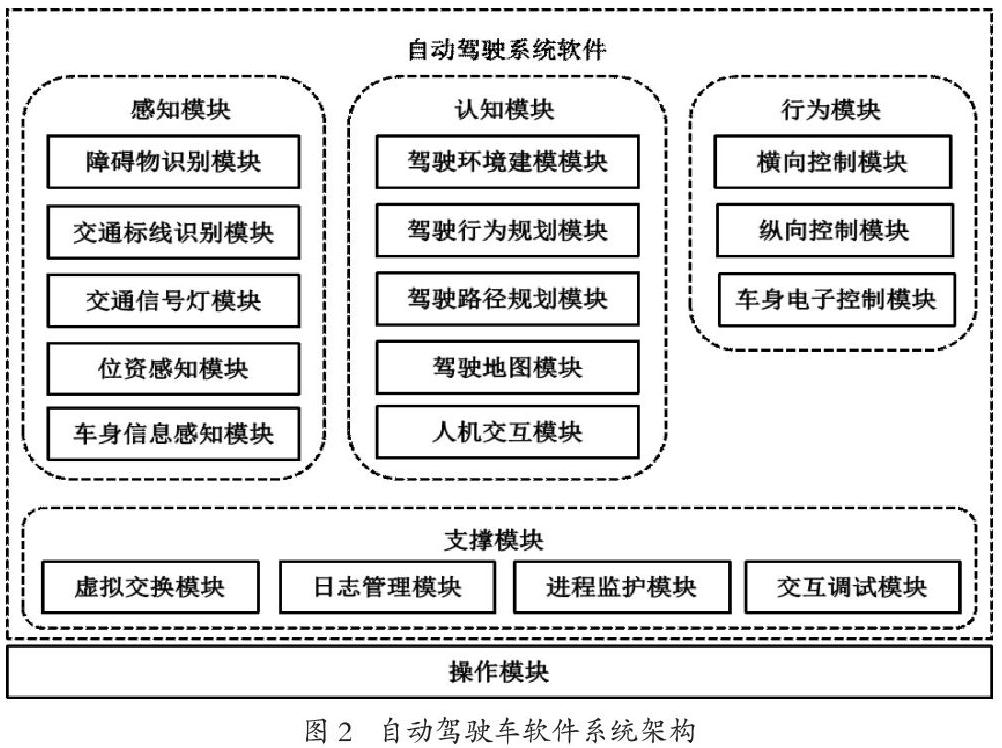
2.2软件框架
自动驾驶汽车软件[5]主要包括:感知、认知、行为、支撑和操作模块。各模块如图2。
2.3自动驾驶的优缺点
安全:从理论上讲,一个完美的自动驾驶解决方案,每年至少能够拯救120万中国老年人的健康和生命。
方便:自动驾驶可以将驾驶员从方向盘后面解放出来,在乘车时进行工作和娱乐。
高效共享:如果能够实现自动驾驶,那么人们可以不再买车和养车,完全依赖于共享出行,这将为每个家庭节约大量在交通方面的开支。
减少拥堵:减少拥堵这一优点,可以使得人们的出行更加方便快捷。
3 机器学习在自动驾驶系统中的作用
作为一种人工智能[5]技术在汽车行业、运输领域的一个延伸和应用,无人驾驶近几年来已经在全球乃至国际社会各个地区以及其他国家和地区得到了广泛的密切重视。
学习是现阶段人工智能发展的重要表现,深度学习[6][7]和功能是人工智能发展的重要特点,而且自动驾驶的本质是通过智能汽车向人们学习而驾驶汽车。感知技术主要依靠传感器,比如摄像头,由于它们的成本较低,在行业内倍受广泛青睐。图像[8]辨识技术就是通过一个摄像头,我们就可以轻松地完成对交通标志的辨识、交通信号灯的辨识、行人的检测,甚至我们就可以辨识前方到底是自行车、汽车或者卡车。认知与控制这两个方面,主要利用了人工智能技术领域下汽车中的一种传统机器人学习技术,通过机器学习对人类驾驶员的行动和驾驶方式建立了驾驶员的模型,学习机器人的驾驶方式来操纵和控制[9]汽车。
4 自动驾驶中应用的机器学习算法
4.1算法概述
人工智能算法主要包括数据处理、图像识别和语义分割技术,而自动驾驶汽车的实现必须用到这三项技术,其中机器学习可包括监督学习、无监督学习和增强学习。
假设自动驾驶被划分为四项子任务,分别为检测目标、物体的识别和分类、对物体的定位与运动进行预测。可大致划分为四种类型:回归算法、聚类算法和决策矩阵算法,其中需要特别注意的就是机器学习算法[10]和任务分类并不都是一一相互对应的,比如回归算法既然可以广泛应用于物体的定位,也同样可以广泛应用于物体的检测和对象运动的预测。
4.2决策矩阵算法
决策矩阵算法可以系统地分析、识别和评价一组信息集和值之间的关系性表现,主要是为了帮助用户做出决策adaboosting 是最常见的算法。我们可以把adaptive boosting 算法简单地称之为 adaboost ,它是多种机器学习算法的完美组合,可以广泛地应用在回归和分类问题中。
上面这张图片描述了如何通过一个能够理解度量代码的简单文件来实现 adaboost 算法。
4.3聚类算法
有时,系统所获取的信息或者图像并没有很清楚,使得对于一个物体来说难以进行定位和检测。
4.3.1 K-均值算法
K-均值用来表示若有一个点送到某一质心的时间距离相对于到其他质心都近,这个点就被指派送到这个最近的质心所需要代表的簇。K均值图如下:
用“x”这个符号直接表示在该图中各点的最近聚合分类质心,在每次迭加替代中各点的每个训练样本实例都可能需要再次指派该输出来用以找到一个最近的集合聚类质心,每个训练集合的最近聚合分类质心被通过转换来作为从点移动到其他点的一个平均值。
4.3.2支持向量机(SVM)
SVM最主要的特征之一就是決策平面,其可以把明显具有类似或类别之间关系的物体与对象区分开。例如图5所示,决策的边界将红色与绿色之间的物体区分成两个部分。
4.4卷积神经网络
卷积式运动神经网络在各个可广泛应用的技术领域主要应用有:图像识别、语音信息识别、自然语言处理(或者例如根据语句顺序划分)。它们还能够准确地快速识别随时出现在人脸、物件和其他交通运输工具上的各种信号,从而给驾驶机器人和智能电子自动车辆驾驶中的车辆应用提供了新的视力。卷积神经网络的具体操作示意图如图6所示:
5人工智能在自动驾驶定位技术中的应用
自动驾驶汽车若想安全行驶,必须要能实现精准的定位,包括行驶路上车道线的定位、停车如图定位,红绿灯定位,所以说自动驾驶行驶的基础就是定位技术。下图为定位算法实施框图:
利用深度学习[11]算法实现无人驾驶的实施步骤如下:
(1)对数据进行预处理。
(2)输入大量数据对第一层进行无监督学习。
(3)对数据分类,将相近的数据划分为同一类,随机进行判断。
(4)调整阀值,提高数据输入的正确性。
(5)将其训练结果作为其更高一层的输入。
(6)输入之后用监督学习去调整所有层。
6 自动驾驶技术所面临的挑战和展望
在我国交通运输和出行条件越来越糟糕的大环境情况下,“自动驾驶”小型汽车在市场上的商业化发展前景,还是会受到许多因素的制约。主要包括:
(1)法规障碍。
(2)不同品牌车型间建立共同协议[12]。
(3)产品行业缺乏规范与标准、基本的道路情况,标志和信息的准确。
(4)信息网络的安全性和难以承受的高昂成本。
这些制约就目前的技术来说,L4自动驾驶汽车于2020年底已初步实现,但还是无法实现全自动驾驶L5。好在自动汽车驾驶困难关键在于人的感知,重在“学习”,自动汽车驾驶的基础科学和工业技术水平迟早会远远地要超越现代人类,完全自动无人驾驶或许有点遥远,但要实现这种人机和谐的共同试驾的目标指日可待。
参考文献:
[1]陈晓博.发展自动驾驶汽车的挑战和前景展望[J].综合运输,2016(11):9-13.
[2]余阿东,陈睿炜. 汽车自动驾驶技术研究[J].汽车实用技术,2017(2):124-125.
[3]朱敏慧.逐步实现自动驾驶5个层级[J].汽车与配件,2016(11):4.
[4]2018 Self-driving safety report[R]. General Motors Cooperation,February 2018.
[5]郭旭.人工智能视角下的无人驾驶技术分析与展望[J].电子世界,2017(20):64-65.
[6]王科俊,赵彦东,邢向磊.深度学习在无人驾驶汽车领域应用的研究进展[J].智能系统学报,2018,13(1):55-69.
[7]On the road to fully self-driving-modeling the future challenge[R]. Waymo Safety Report,October 2017.
[8]Seif H G,胡晓龙.智能城市中自动驾驶汽车工业的关键挑战:高清地图[J]. Engineering,2016(02):27-35.
[9]薛建儒,李庚欣. 无人车的场景理解与自主运动[J].无人系统技术,2018,1(2):24-33.
[10]Lillicrap T P,Hunt J,Pritzel A,et al. Continuous control with deep reinforcement learning[J]. Computer Science,2015,8(6):A187.
[11]Van HH ,Guez A ,Silver D. Deep reinforcement learning with double q-learning[J]. Computer Science,2015.
[12]Scott P,Hans A,Xinxin D,etal. Perception,planning,control,and coordination for autonomous vehicles[J].Machines,2017,5(1).
猜你喜欢
阅读与作文(英语初中版)(2019年8期)2019-08-27
中国科技纵横(2017年4期)2017-05-16
中学生数理化·高一版(2017年1期)2017-04-25
中学生数理化·高一版(2017年1期)2017-04-25
中学生数理化·高一版(2017年1期)2017-04-25
移动通信(2016年24期)2017-03-04
时代金融(2016年27期)2016-11-25
科教导刊(2016年26期)2016-11-15
家用汽车(2016年9期)2016-11-04
科学与财富(2016年28期)2016-10-14