基于模糊自适应PID的无人驾驶车辆路径跟踪控制
2021-10-15 10:41张佳奇杨佳龙葛平淑
大连民族大学学报 2021年3期
张佳奇,张 涛,杨佳龙,葛平淑,肖 鹏
(大连民族大学 机电工程学院,辽宁 大连 116605)
路径跟踪控制问题是无人驾驶车辆领域中的重要研究内容之一,有利于降低交通事故,提高车辆主动安全性能。目前,路径跟踪控制模型主要分为预瞄跟随模型和智能控制模型两大类[1]。预瞄跟随模型的基本原理是在路径前方设立预瞄点,使车辆获取预瞄点所处位置信息,即未来路径曲率及行驶偏差,并根据这些信息控制无人驾驶车辆,以实现对目标道路的有效跟踪。控制算法大多采用PID控制、模糊控制、滑模控制及最优控制等[2-4],其优点在于鲁棒性强且参数易调节,但较少考虑车辆动力学和驾驶环境约束的影响。智能控制模型将智能控制算法引入驾驶员模型,目前主要有基于模糊逻辑[5]、神经网络[6]、模型预测[7]和深度强化学习等算法[8]。智能控制模型模拟人的思维能力,使系统更加智能化,但需要较大计算量,现阶段实时性不易达到。
综上,本文基于预瞄理论建立考虑纵向车速的运动学模型,以前轮转角作为控制系统的输入,设计基于横向偏差和航向偏差的模糊自适应PID路径跟踪控制算法。分析量化因子和比例因子的选取原则,利用模糊理论对PID参数进行自适应调整,基于Carsim与Simulink对所提算法进行联合仿真实验。
1 考虑纵向车速的车辆预瞄运动学建模
1.1 惯性坐标系下车体运动学模型
车辆与道路的相对运动关系如图1。
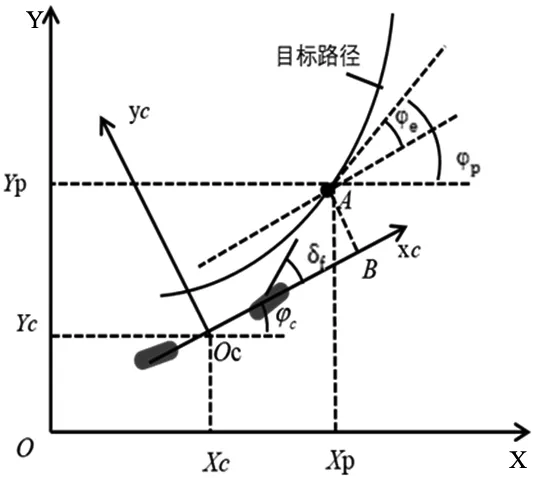
图1 车辆和道路的相对运动关系
在车辆坐标系中,假设车辆质心坐标为(xc,yc),横坐标与X轴夹角为φc,则得到车辆的运动学模型如式(1)。
(1)
式中:ωc为车辆质心处的横摆角速度;vc为质心处的纵向速度。由公式(1)能够进一步推导出车辆下一时刻的行驶轨迹,设车辆目标道路上的预瞄点为A,坐标为(XP,YP),切线方向与X轴形成的夹角为φp,从而得出车辆的运动学模型如下:
(2)
式中:xe为车辆前方预瞄距离;ye为车辆质心处与预瞄点之间的横向偏差;φe为车辆质心处与预瞄点之间的航向偏差。
1.2 基于预瞄的转向角生成器
预瞄点(XP,YP)处的道路曲率半径R与预瞄距离xe和航向偏差φe之间的关系可以表示为
(3)
车辆期望前轮转角:
δf=tan-1(L/R)。
(4)
将式(4)代入式(3)中得到:
δf=tan-1(2Lsinφe/xe)。
(5)
航向误差φe可跟根据预瞄距离xe和预瞄点处横向轨迹误差ye表示:
sinφe=ye/xe。
(6)
预瞄距离xe的大小与纵向车速vc有关:
xe=kvc。
(7)
式中,k为调整比例系数。
将式(6)和式(7)代入式(5)中,可得前轮期望转角:
(8)
1.3 航向误差生成器
车辆当前质心点OC加上预瞄距离xe得到点B,点B在目标路径上的投影即为预瞄点A,从而得到当前目标方向φp:
(9)
车辆当前质心位置OC,坐标为(xc,yc),预瞄点A处坐标为(XP,YP),从而得到:
(10)
由(6)式和(8)式进一步得出航向偏差:
φe=φp-δf。
(11)
2 路径跟踪控制器设计
模糊自适应PID是在传统PID的基础上增加模糊控制规则库,根据建立好的规则对PID参数进行自适应调整。模糊控制在解决非线性及不确定问题上具有较好的控制效果。本文设计模糊自适应PID从而实现自动驾驶车辆的路径跟踪控制。控制框图如图2。
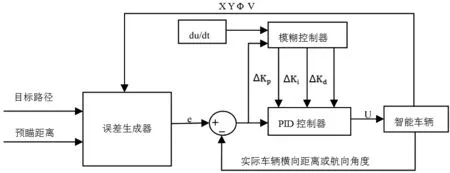
图2 模糊自适应PID路径跟踪控制框图
控制器输入分别为横向偏差ye、横向偏差变化率yec,航向偏差φe及航向偏差变化率φec。输出为ΔKp、ΔKi、ΔKd。将控制输入、输出的基本论域规划为13个等级,控制输入输出采用三角形隶属度函数,中间隶属度函数较为陡直的区域分辨率高,控制灵敏度也比较高,输入、输出变量隶属度函数如图3。
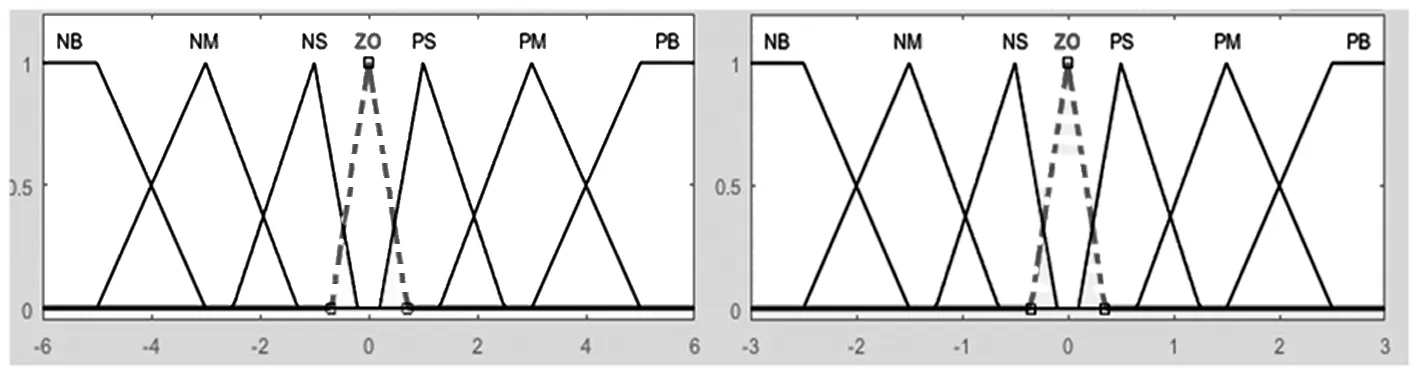
a)输入变量隶属度函数 b)输出变量隶属度函数
从汽车驾驶的经验角度制定出一套模糊控制规则。采用if-then语句进行模糊规则库的建立,具体可表示如下:
ifyeis NB andyecis NB
thenΔKpis PB andΔKiis NBΔKdis PS
模糊自适应PID控制器计算自适应调整参数:
(12)
式中:Kp、Ki、Kd为初始PID参数;k1、k2、k3为比例因子;ΔKp、ΔKi、ΔKd是经模糊规则调整得到的参数。
模糊自适应PID最终输出参数:
式中,e(k)表示第k个采样时刻输入的偏差。
利用Mamdani的模糊推理方法,根据极大值极小值法得到模糊控制量的输出矢量,解模糊选取重心法,模型输出曲面如图4。
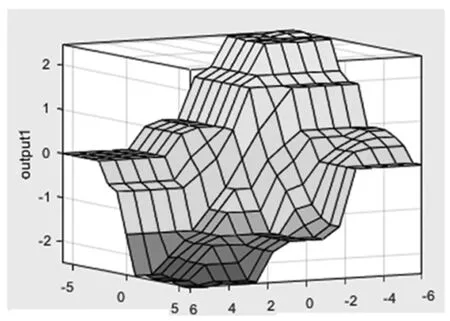
图4 模型输出曲面
在建立模糊规则库的基础上,对量化因子和比例因子的选取也做了相应的仿真分析。利用设定不同的航向误差范围,通过设定阈值,整定出车辆偏航误差大与误差小两种情况的比例因子与量化因子。实验结果表明:
(1)当路径跟踪偏差比较大时,此时应增加横向偏差对控制输出的影响,量化因子起主导作用,应加大横向偏差比例因子与航向误差比例因子的比值。控制偏差在阈值45°的仿真结果如图5。
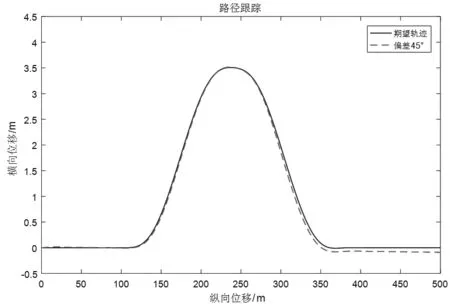
图5 偏差阈值45°时路径跟踪效果
(2)当路径跟踪偏差较小时,控制量应着重考虑超调给系统带来的影响,要以系统稳定性为主要出发点,这时应加航向偏差相对横向偏差的控制权重,加大航向偏差的量化因子,减小横向偏差的量化因子,控制输出量的比例因子也应减小。控制偏差在阈值12°的仿真结果如图6。

图6 偏差阈值12°时路径跟踪效果
3 基于Carsim与Simulink联合仿真的路径跟踪控制仿真
基于CarSim软件建立车辆模型,设置各子系统和行驶工况的参数。在MATLAB/Simulink中构建系统路径跟踪控制策略。在CarSim中设置控制变量的输入与输出,获取车辆实时动态响应。CarSim的输入接口为前轮转角,输出接口为航向角、质心纵向速度、质心坐标位置、车辆与目标道路的前视距离、前方道路目标点的位置等。在Simulink中建立转角生成器及路径跟踪控制器。联合仿真流程如图7,控制策略如图8。
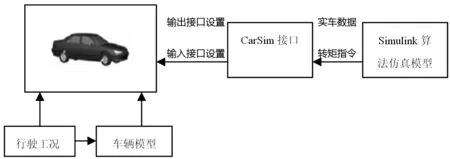
图7 CarSim/Simulink联合仿真流程
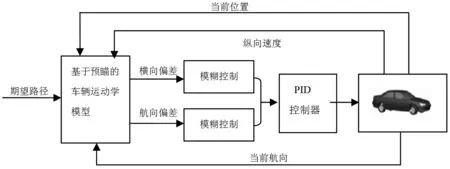
图8 路径跟踪控制策略
选取路径较为复杂的U型线、伯努利双纽线两种工况进行仿真分析。
(1)U型线工况。选取20 km·h-1、40 km·h-1、60 km·h-1的车速,基于U型道路,对PID控制器和模糊自适应PID控制器进行仿真,路径跟踪效果如图9。从仿真结果来看,模糊自适应PID较传统PID控制算法,具有较好的车辆路径跟踪性能,使目标车辆更能可靠稳定地跟踪期望轨迹。表明模糊自适应PID较传统PID,具有较好的路径跟踪性能,随着速度的增大,系统的非线性明显,传统PID控制效果逐渐变差,模糊自适应PID依旧能够较好地跟踪路径。

a)速度20 km·h-1 b)速度40 km·h-1 c)速度60 km·h-1
(2)伯努利双纽线工况。伯努利双纽线工况较为复杂,能更好地体现测试车辆的各项驾驶性能。本文选取20 km·h-1、40 km·h-1、60 km·h-1的车速,基于伯努利双纽线,对PID控制器和模糊自适应PID控制器进行仿真,仿真结果如图10。在直线路段或者速度较低时,两种控制方法都能较好地跟踪路径。但随着车速的增加,在曲线路段,常规PID控制器参数由于不能及时调整,误差逐渐增大。模糊自适应PID控制由于能及时调整控制器参数,跟踪效果较PID更优。在车速较高的曲线路段,模糊自适应PID的跟踪效果还可以进一步提高。分析原因,一方面车速提高,车辆动力学特性明显;另一方面,弯曲路段时,基于预瞄的车辆运动学模型有待进一步优化。
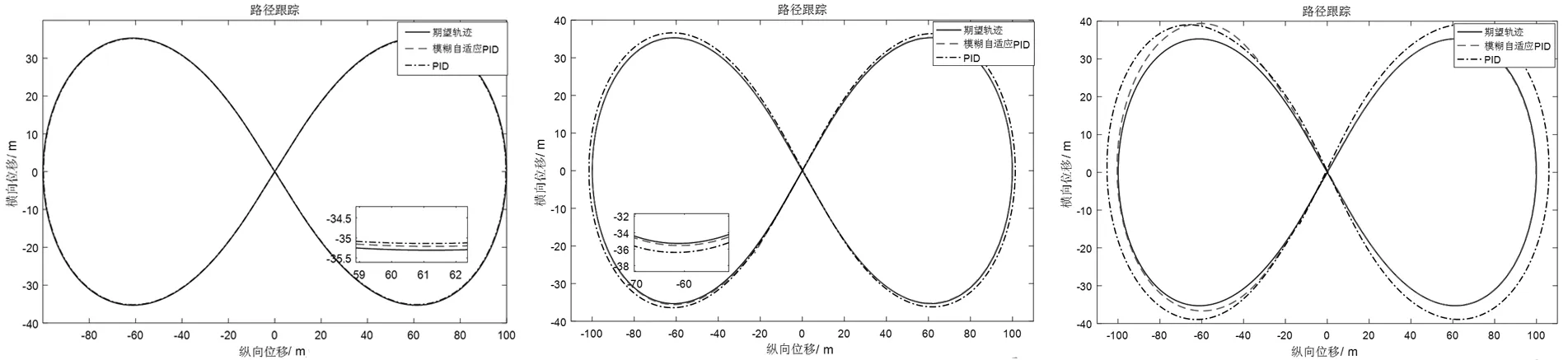
a)速度20 km·h-1 b)速度40 km·h-1 c)速度60 km·h-1
4 结 语
本文基于车辆运动学预瞄及误差模型设计了基于模糊自适应PID的路径跟踪控制器,基于CarSim/Simulink联合仿真进行实验验证。仿真结果表明,本文所设计的模糊自适应PID控制器在直线路段或速度较低的曲线路段能够精确可靠地跟踪期望路径。下一步将基于本文研究基础,重点探讨高速且曲率较大的道路上的路径跟踪控制模型。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
汽车实用技术(2022年14期)2022-07-30
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
科技与创新(2021年24期)2022-01-03
北京航空航天大学学报(2021年4期)2021-11-24
电子制作(2019年15期)2019-08-27
电子技术与软件工程(2019年8期)2019-07-16
中学生数理化·教与学(2019年5期)2019-06-06
民用飞机设计与研究(2019年4期)2019-05-21