3WP-200型智能植保机器人喷洒装置性能试验分析
2021-10-15 01:42张义胜宫玉敏侯心爱刁培松张银平黄道跟
农机使用与维修 2021年10期
张义胜,宫玉敏,侯心爱,刁培松,张银平,黄道跟,郭 刚
(1.淄博市农业机械研究所,山东 淄博 255086;2.山东理工大学,山东 淄博 255000;3.山东鲁虹农业科技股份有限公司,山东 曲阜 273100)
0 引言
植物保护是农业生产的重要工作。农作物病虫害防治是劳动强度最大的田间劳动[1],药物防治是确保农业稳产增收的重要措施[2],而植保机械的自动化水平成为降低劳动强度,提高植物保护成效的关键。
目前,我国大田作物生长期的追施肥、病虫害防治等田间管理机械的研制尚处于起步阶段,主要存在的问题是可靠性差、故障率高、机械结构复杂、性能差等[3]。其中喷雾设备比较落后,很多地方还在使用背负式的手动喷雾设备或者是高压喷枪,不仅药量大、用药不均匀,而且还会严重污染环境[4]。农药过量使用会带来生产成本增加、农产品残留超标、作物药害、环境污染等问题,直接威胁农业可持续发展[5]。
传统喷药方式采用人工式喷药,不仅工作强度大、喷药不均匀,且可能出现重喷、漏喷等情况,无法保证喷雾质量,对环境也会产生一定的污染,使作物产生抗药性,增加作物感染寄生虫的风险[6]。
我国作为农业生产大国,丘陵山区地带占国土面积的10%[7]。广大山区或丘陵地区种植地块面积小,道路狭窄,大型植保机械不方便进入土地作业。
为满足市场需求,克服传统喷药方式存在的缺点,研制了3WP-200型智能植保机器人。
1 植保机器人结构及工作原理
3WP-200型智能植保机器人主要技术指标如下:
遥控四轮自走式;
最小离地间隙≥15 cm;
轮距65~70 cm;
行进速度2.4~9.6 km·h-1;
遥控距离≤1 000 m;
药箱容量200 L;
药泵流量≥6 L·min-1;
工作压力0.2~0.3 MPa;
大田除草作业宽度6~8 m;
葡萄专用作业高度≤2 m;
果树型作业高度≤6 m。
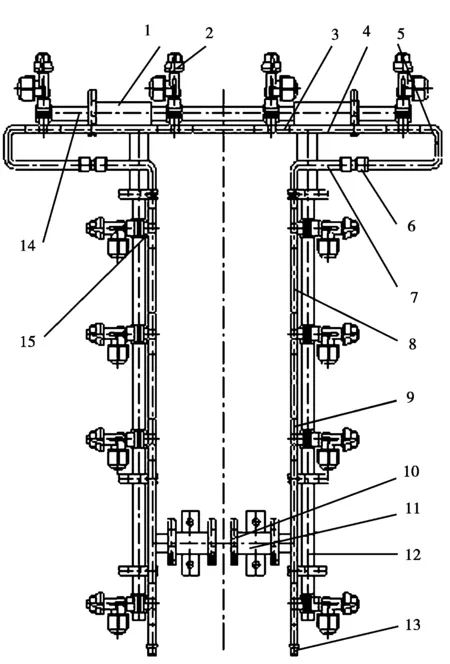
如图1所示,为3WP-200型智能植保机器人结构,由动力系统、控制系统、行走系统和喷雾系统4部分组成。
动力系统由5.5 kW汽油发电机和交直流转换器组成,也可更换为蓄电池。动力系统最后输出直流电,分别为行走系统的转向电机、四轮驱动电机、喷雾系统中的药泵、喷枪电机、控制系统、控制器等提供电力。
控制系统由控制器和遥控器组成。机器人作业时,工作人员通过遥控器远程操作,控制器通过天线接收到信号后,向各系统发出相应指令,控制植保机器人的前进、后退、停止、转向和作业。
行走系统由四轮驱动机构和转向电机组成。每个行走轮上方安装有转向电机,每个行走轮中心安装有驱动电机,完成植保机器人的行走及转向工作。
喷雾系统由药泵、药液箱、喷洒装置组成。喷雾系统开关由遥控器控制,药泵为农用3缸柱塞泵,药泵将药液箱中药液输送到喷洒装置。
植保机器人采用后置式喷洒装置,配置喷枪摆动喷洒、喷头装载于垂直喷杆喷洒、喷头装载于横向喷杆喷洒三种结构型式,分别满足果树、葡萄架、大田农药喷洒需求。
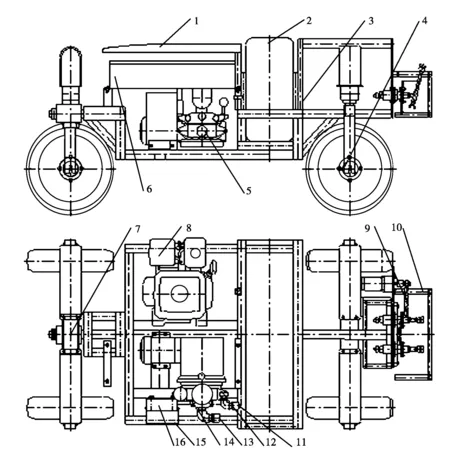
1.保护罩;2.药液箱;3.机架;4.驱动轮;5.药泵;6.控制系统;7.前车架总成;8.发电机;9.喷枪摆动喷洒装置;10.保护架;11.药泵进口;12.压力调节阀门;13.药泵出口a;14.药泵出口b;15.整流稳压模块;16.换热器图1 喷枪摆动喷洒植保机器人结构图
2 三种喷洒装置结构
2.1 喷枪摆动喷洒装置
如图2所示,喷枪摆动喷洒装置由摆动机构、电机护罩、电机、减速机、喷洒装置固定板、喷洒机构组成。
如图3所示,摆动机构总成由螺栓、电机摆动拉杆、连接杆、关节轴承、螺母、喷洒机构及摆动机构连接杆等组成。
药泵两个出水口分别连接到两个喷枪,两个喷枪固定在摆动机构上。电机做旋转运动,带动摆动机构左右往复摆动,进而带动喷枪一边喷洒,一边左右摆动。两个喷枪通过摇摆可以实现180°无死角全方位喷洒,喷枪喷雾距离大、覆盖面广,可用于果树植保作业,作业高度在6 m以内。
电机采用直流小型齿轮减速电机,功率40 W,额定电压24 V,转速3 000 r·min-1。减速机减速比120∶1,即减速机最高输出转速为25 r·min-1。调整输入电压的大小,可改变输出转速的大小,即改变摆动机构的摆动频率。
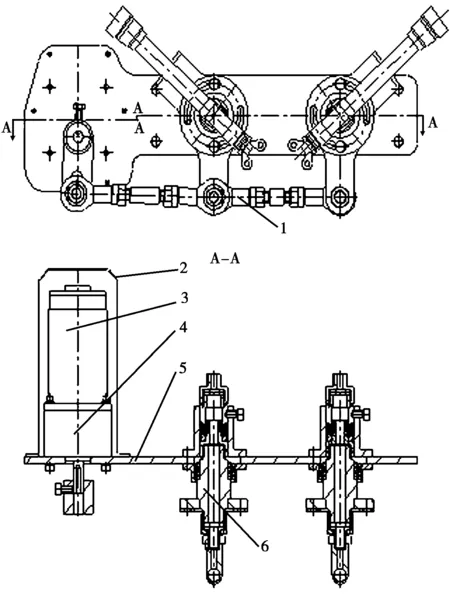
1.摆动机构;2.电机护罩;3.电机;4.减速机;5.固定板;6.喷洒机构图2 喷枪摆动喷洒装置结构图
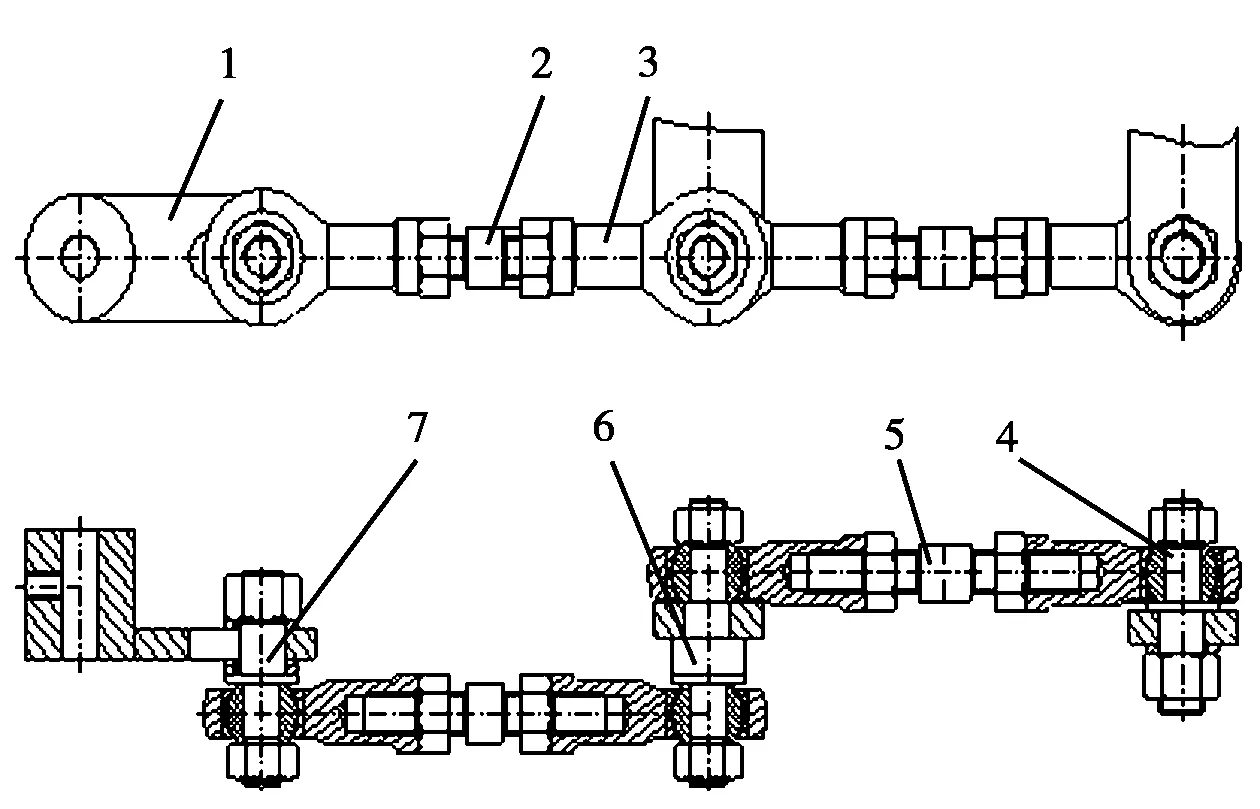
1.摆动拉杆;2.连接杆;3.关节轴承;4.关节轴承;5.连接杆;6.销轴;7.销轴图3 摆动机构总成
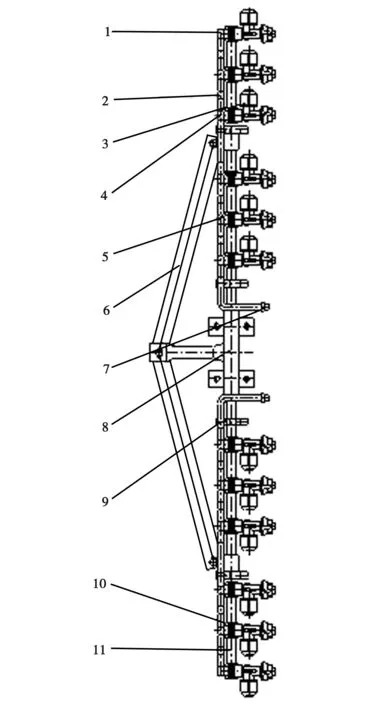
1.弯头;2.喷头;3.软管卡子;4.软管1;5.软管2;6.接头;7.软管3;8.软管4;9.三通;10.卡箍;11.竖管底部固定段;12.竖管底部T型连接段;13.进水软管;14.横杆;15.喷头固定卡子图4 喷洒装置(垂直安装)结构图
2.2 喷头装载于垂直喷杆喷洒装置
如图4所示,喷洒装置替换为桁架式,即喷杆垂直安装,喷杆上均匀设置12个喷头,药泵两个出口分别与垂直喷杆喷洒装置两个进水口连接软管连接,药液通过12个喷头进行喷施。
垂直喷杆喷洒装置适用于对猕猴桃、葡萄、西红柿、黄瓜等爬藤果蔬进行喷洒作业,作业高度在2 m以内。
2.3 喷头装于横向喷杆喷洒装置
如图5所示,喷杆横向安装时,喷杆上均匀设置12个喷头,药泵两个出口分别连接到横向喷杆喷洒装置两个进水连接软管,药液通过12个喷头喷向植物。横向喷杆喷洒装置可以进行大田、叶菜类的喷雾作业,作业宽度为6~8 m。
1.弯头;2.软管;3.喷头;4.三通;5.喷头固定卡子;6.斜拉杆;7.进水软管;8.T型固定架;9.卡箍;10.软管卡子;11.横杆图5 喷洒装置(横向安装)结构图
3 喷洒量测试
2020年9月14日,在淄博市农业机械研究所院内,对3WP-200型智能植保机器人2#样机进行了喷洒量初步测试。测试按照T/CAMA 22-2019《喷杆式植保机器人》、GB/T24677.2-2009《喷杆喷雾机试验方法》等标准进行。测试项目为喷枪喷洒量、喷杆喷头喷洒量、喷杆上各喷头喷雾量变异系数、喷头防滴性能测量等。试验地块平整,试验介质为常温下不含固体悬浮物的清水。
三种喷洒装置试验压力均设定额定工作压力为0.3 MPa。
3.1 喷枪喷洒量测定
测定工作开始之前,首先对喷枪进行检查,确认出口无堵塞现象时,方可进行测定。
喷枪的数量为2个,总的清水排量为20 L,记录测试时间,然后计算单位时间内喷枪的喷洒量。测试次数为3次。喷枪流量检测场地见图6,测定结果见表1。

图6 喷枪流量检测
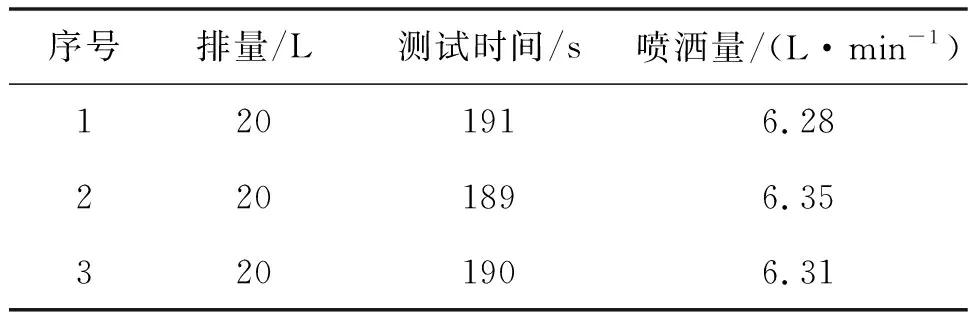
表1 喷枪流量检测结果
3.2 喷杆喷头喷洒量测定
测定工作开始之前,首先对喷头进行检查,确认出口无堵塞现象时,方可进行测定。
由于喷杆横向安装及垂直安装,喷头喷洒量一致,因此只记录喷杆横向安装时喷头喷洒量。
喷杆横向安装,喷头的数量为12个。总的清水排量为20 L,记录测试时间,然后计算单位时间内喷杆喷头的喷洒量。测试次数为3次,测定场地见图7,测定结果见表2。

图7 横向安装喷杆喷头喷洒量测定
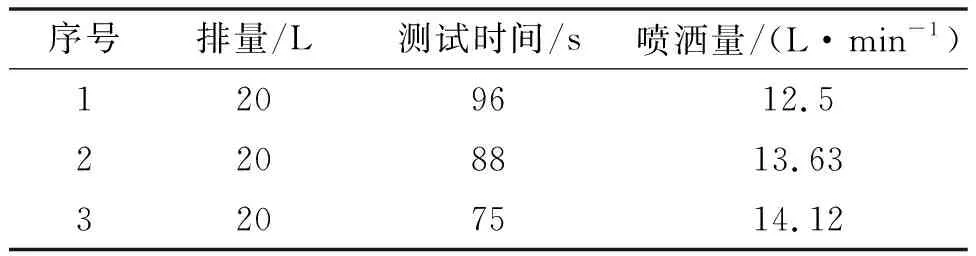
表2 喷头流量检测结果
3.3 喷杆喷头喷雾量变异系数测定
喷杆上各喷头的喷雾量变异系数按照GB/T24677.2-2009中5.3的规定执行。根据标准要求,植保机器人在额定工作压力下喷雾时,喷杆上各喷头的喷雾量变异系效应不大于15%。
试验前,按喷头制造厂提供的压力和流量指标对喷头进行检验,合格后方可在植保机上装配。
试验压力为额定工作压力0.3 MPa,测定喷杆上每个喷头的喷雾量,喷头的数量为12个。用塑料袋盛接雾流,袋口密封严实,避免雾滴飞溅或外流。测定时间1 min,试验次数三次,按式(1)~(3)[8]计算喷雾量变异系数。
(1)
(2)
(3)
式中q1、……、qn—各喷头喷雾量,L·min-1;
n—喷头数量,个;

∑q—喷头的总喷雾量,L·min-1;
S—标准差,L·min-1;
CV—喷雾量变异系数,%。
这里只记录喷杆横向安装的测试数据,测定结果见表3。计算结果表明,各喷头的喷雾量变异系数为7.8%,符合标准要求。
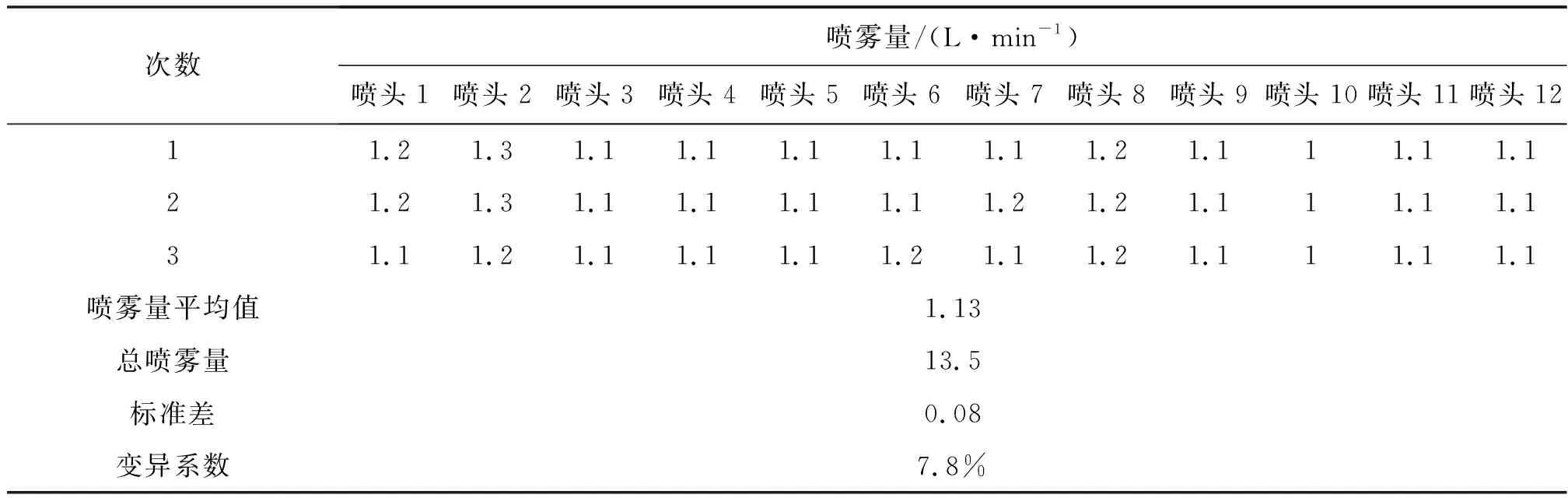
表3 喷头喷雾量变异系数测定结果
喷头喷雾量的大小取决于工作压力的大小和喷头的结构尺寸。当喷头有堵塞现象时,影响喷雾量的大小,进而影响喷头的喷雾量变异系数。
3.4 喷杆喷头防滴性能的测量
喷杆喷头防滴性能测量按照GB/T 24677.2-2009中5.4的规定执行。
植保机在额定工作压力下进行喷雾,停止喷雾5 s后计时,观察出现滴漏现象的喷头数,计数各喷头1 min内滴漏的液滴数,出现滴漏现象的喷头数量应不大于喷头总数的10%,且单个滴漏喷头滴漏的液滴数应不大于10 滴·min-1。测定结果记入表4。测定结果表明,第一次测试时,1号喷头滴漏5 滴·min-1;第二次测试时,6号喷头滴漏2 滴·min-1;第三次测试时,11号喷头滴漏5 滴·min-1;三次测试喷头滴漏总数为12 滴·min-1,喷头滴漏的平均值为1,符合标准要求。
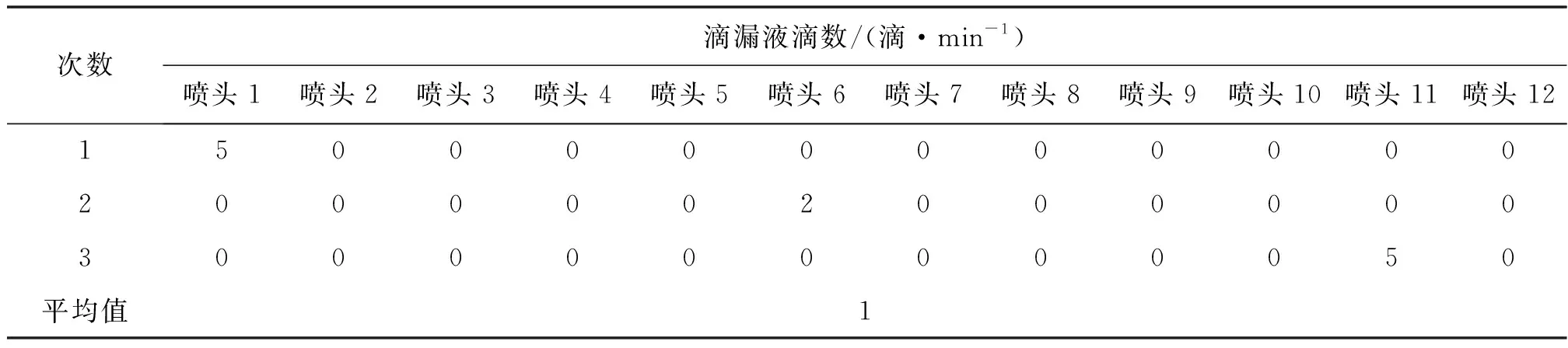
表4 喷头滴漏的液滴数测定结果
4 结论
(1)3WP-200型智能植保机器人,喷洒装置后置设计,配置喷枪摆动喷洒、喷头装载于竖向喷杆喷洒、喷头装载于横向喷杆喷洒三种结构型式,一机多用,分别满足果树、葡萄架、大田农药喷洒需求,大大提高了机具的适用性。
(2)使用3WP-200型智能植保机器人,一人操作便可轻松完成整个喷药工作,极大地提高了植保作业效率,减轻农户的劳动强度。喷洒均匀,减少用药量,降低作业成本,避免了药液在空气中弥散造成人员中毒的危险,减轻对土壤污染。
(3)试验表明,喷枪喷洒量、喷杆喷头喷洒量、喷杆上各喷头喷雾量变异系数、喷头防滴性能的测量等指标均符合有关标准要求。
(03)
猜你喜欢
农业装备与车辆工程(2022年5期)2022-10-31
中国农机化学报(2022年8期)2022-08-12
农业机械学报(2022年2期)2022-03-14
能源工程(2021年1期)2021-04-13
水泵技术(2021年6期)2021-02-16
地理教育·当代幼教(2020年1期)2020-02-16
酒·饮料技术装备(2018年1期)2018-04-28
中国有色冶金(2018年1期)2018-02-01
农业知识(2018年45期)2018-01-17
现代农业(2016年5期)2016-02-28