
基于FDM 型3D 打印机机械结构设计及优化
2021-10-14 03:28邢小颖王龙兵姚启明徐江波
科技与创新 2021年19期
邢小颖,马 运,王龙兵,汤 彬,姚启明,徐江波
(清华大学基础工业训练中心,北京 100084)
随着时代的进步,3D 打印技术也得到了进一步发展并跨入了一个全新的领域,新的信息和控制以及材料等技术不断被广泛应用到机械制造领域,3D 打印技术也将被推向各个领域。需研制更多类型的打印材料,提升打印材料的打印速度、效率和精度,提高3D 打印成品的表面质量、粗糙度和物理性能,以实现直接面向产品制造。本文设计的3D 打印采用FDM(Fused Deposition Modeling)熔融堆积成型技术,以丝状材料为基本原料(如塑料,通过电加热模块将丝材料加热至熔融状态,本文选择PLA 材料),在处理器的控制下,控制喷头在平面X-Y轴做二维平面运动,将喷头内熔融状态的材料按照当前层的轮廓轨迹数据喷射,冷却固化后形成工件的当前层截面,完成一层后,喷头在Z轴方向垂直移动单位高度,进行下一层堆积,这样逐层堆积后形成三维工件。
1 3D 打印机结构设计
1.1 3D 打印机设计基础和依据
1.1.1 设计参数
打印机运行尺寸:200 mm×200 mm×200 mm。打印的最大范围:200 mm×200 mm×200 mm。电机的转速:3 600 r/min。喷头最大运行速度:80 mm/s。最大成型件质量:约为10 kg。Z向定位精度:0.01 mm。加热板、丝杠以及直线导轨轴等的总质量:约10 kg。
1.1.2 材料选择
打印材料:PLA 工程塑料,PLA 耗材熔点为230 ℃左右,分解温度260 ℃以上,因此其通常成型温度在250 ℃左右。加热板材料:LCP 特种工程材料300~350 ℃。
1.2 3D 打印机整体结构设计
打印机的结构材料主要是铝合金,底座由4 个地脚和1块铝板构成,这样的底座稳固性非常强,能保证打印机在工作的时候不会发生摇动而导致打印精度下降。打印机共有5个电机,2 个同步电机用在Z轴方向,1 个用在X轴方向,1个用在Y轴方向,剩下1 个用来传送材料到喷头。在打印机两边装有2 个同步电机连接丝杠,带动喷头所在的光杠在Z轴方向做上下运动。X轴方向电机连接在喷头的同步带使喷头完成左右运动,Y轴方向底座的电机带动加热板完成前后运动,总结构图如图1 所示。

图1 3D 打印机总结构图
从整体结构分析,地脚(如图2 所示)连接底板保证其打印机的稳固性,底板上面连接的龙门(如图3 所示)是打印机最重要的结构,此结构上面固定Z轴方向的电机支架和光杠丝杠支架,同时也固定X轴方向的电机支架和2 根光杠,所以龙门结构既会受到Z轴上下运动的力,也会受到X轴同步带的拉力以及电机的重力,因此,考虑到打印机工作中的载荷作用,设计2 个拉筋(如图4 所示),与龙门固定在一起形成一个整体,有效地约束龙门骨架的变形,增大了龙门的刚度和稳定性。

图2 地脚图

图3 龙门

图4 拉筋
1.3 底座支架结构设计
底座支架结构主要作用是连接支撑底板和加热板,并带动加热板做前后运动。
底座支架分为光杠支架和同步带支架,在打印过程中起关键作用,它们的运动决定了加热板的运动。同步带支架(如图5 所示)的导槽与底座的光杆导套连接,支架中间由同步带固定,电机通过带动同步带使加热板在光杆做Y轴方向的前后运动。加热板与支架通过杆固定连接,底座支架带动加热板做来回运动。
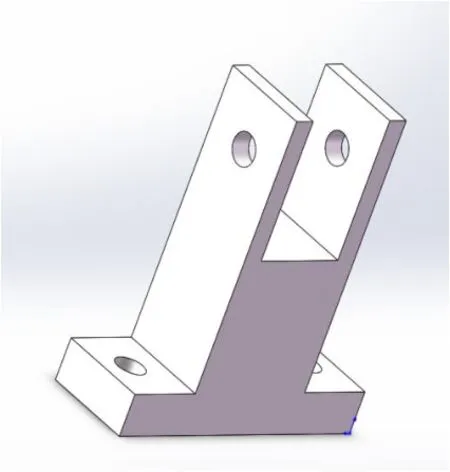
图5 同步带支架
光杠支架(如图6 所示)的作用是支撑整个底板、固定光杆、电机。考虑到受力情况,光杠支架固定在底板上,底板左右各有2 个支架固定2 根光杠,支架中间有固定电机的地方,而且板材相对比较厚,因为要承受比较大的力,包括电机自重和同步带的拉力。
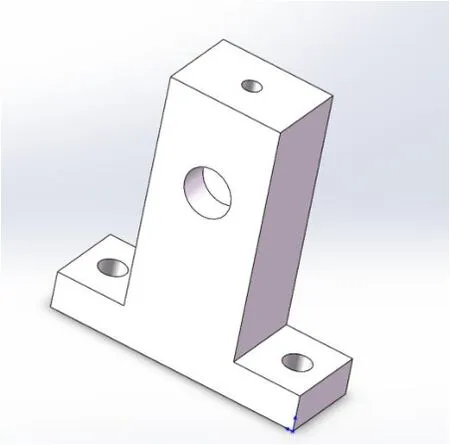
图6 光杠支架
1.4 X 轴方向运动的优化设计
X轴方向的运动之前是使用滑动丝杠,但其在运动过程中摩擦阻力太大,而且传动效率低,虽运动平稳,但在低速或微调时可能出现爬行,螺纹有侧向间隙,反向运动时有空行程,定位精度和轴向刚度较差,因此,将X轴方向运动改为靠同步带带动喷头完成运动,喷头固定在上下2 条同步带上,提高了运动时的稳定性,确保同步带传动比准确,传动的范围广,传动比大,效率高(高达98%),预紧力小,轴和轴承负荷小,单位长度质量很小,因此它允许线速度高。喷头的运动方向是光杠的轴向,为了使喷头运动时不受摩擦力影响,还需在喷头上套上光杠轴套,保证喷头能平稳运动。同步带传动通过左边的电机带动同步带轮完成。
1.5 Z 轴升降系统设计
Z轴方向的主要构件有电机L 板(如图7 所示)、丝杠、光杠和上端L 板,这些构件能完成零件支撑和在Z轴方向运动,电机L 板固定在底板上连接电机,通过联轴器驱动丝杠上的喷头上下移动,丝杠和光杠通过X轴右端的支架(如图8 所示)和X轴左端的支架(如图9 所示)进行固定,此支架既可以固定Z轴方向的丝杠、光杠,也可以固定X轴方向的电机和2 根光杠,Z轴带动喷头上升一层的厚度,实现零件的堆积,确保定位精度。定位精度的好坏直接影响成型零件的尺寸精度和表面光洁度和层与层之间的粘结性能。采用步进电机驱动、精密滚珠丝杠传动和精密导轨导向,步进电机配合细分驱动电路,直接连接滚珠丝杠来实现高分辨率驱动,消除中间齿轮传动,减小了尺寸和传输误差。
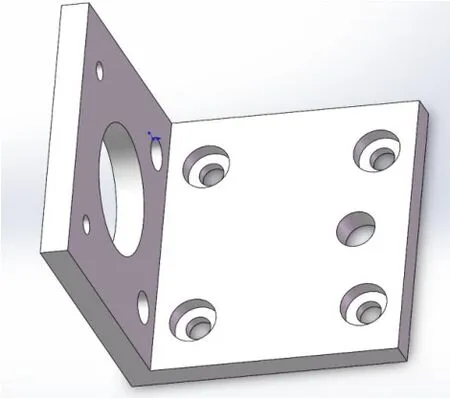
图7 电机L 板

图8 X 轴右端固定支架
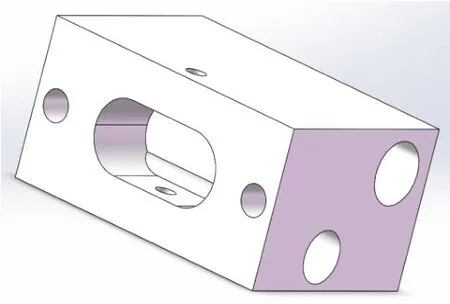
图9 X 轴左端固定支架
2 3D 打印机主要构件受力分析(X 方向光杠的受力分析)
当光杠、丝杠等构件工作时,将会受到载荷的作用,它们有抵抗破坏的能力,但在外力作用下这种能力又是有限度的,而且在外力作用下,它们的尺寸和形状还将发生变化,为保证光杠、丝杠正常工作,应有足够的承受载荷的能力,因此,它应该满足强度要求、刚度要求、稳定性要求。若构件横截面尺寸不足或形状不合理,或材料选用不当,将不能满足上述要求,不能保证工程结构或机械安全工作。也不应不恰当地加大横截面尺寸或选用优质材料,这样会增加成本造成浪费。对构件进行必要的受力分析,在满足强度、刚度和稳定性要求的前提下,为设计既经济又安全的构件提供必要的理论基础和计算方法。进行机械设计或工程结构设计时,要判定零件或构件受载后的工作应力,需要预先确定衡量的标准,这个标准就是许用应力。因此要对零件或构件进行许用应力校核,凡是零件或构件中的工作应力不超过许用应力时,这个零件或构件在运转中是安全的,否则就是不安全的。光杆的受力与剪切如图10 所示。

图10 光杆的受力图
光杆长为266 mm。根据平衡方程求出约束力,然后用截面假想沿C 处把光杠切开为左右两段,取左端梁为脱离体,因杆原来处于平衡状态,所以被截取的左段杆也同样保持平衡状态。
令a=100 mm,b=166 mm,F=3 N。

取X1=0.08,求出喷头力作用在X1点处时剪力和弯矩的大小:

取X2=0.12,求出喷头力作用在X2点处时剪力和弯矩的大小:

对导轨再一次进行核对、校核、验证,经过检验导轨刚度,最终得出总误差为0.72 μm,查表知6 级精度导轨允许误差13 μm,因此刚度足够,保证在合理范围内。
3 结论
对 FDM 型3D 打印机机械结构进行设计,基于Solidworks 软件对框架结构底座支架及X轴方向运动的优化和Z 轴升降系统进行了设计,最后对机械部分总体进行装配,对导轨的受力进行再一次计算,保证在合理范围之内。3D 打印机成本较低,也可以应用学校教学,对今后3D 打印机的普及起到很大作用。
猜你喜欢
机床与液压(2022年8期)2022-09-19
建材发展导向(2022年12期)2022-08-19
汽车实用技术(2020年4期)2020-04-10
学苑创造·B版(2018年6期)2018-07-09
百科探秘·航空航天(2018年1期)2018-05-14
商情(2017年4期)2017-03-22
中国新通信(2016年17期)2016-11-17
文学港(2011年3期)2011-11-21
新媒体研究(2009年21期)2009-07-13
中小企业管理与科技·下旬刊(2009年9期)2009-03-08
