
基于Kibana 系统的机器人故障数据分析
2021-10-14 03:28张艳清
科技与创新 2021年19期
张艳清
(北京奔驰汽车有限公司,北京 102600)
科学技术是第一生产力,当代不断涌现出新型科学技术,以各种各样的形式影响着人类生活,其中信息化技术与数字化技术得到了极大进步。尤其是近些年来,大数据技术的应用极大促进了各大行业的发展,大数据无处不在,其主要被应用于金融、汽车、餐饮、电信、能源、体能和娱乐等领域,可以看出社会各行各业都已经有了大数据的印迹。北京奔驰汽车有限公司在北汽集团与戴姆勒股东双方的战略引领下,以及在北京市、大兴区各级领导的大力支持下,以世界领先的制造工艺和卓越的运营水平为依托,全面发力高端制造的前沿阵地。此外,工厂秉承“数字化、柔性化、高效、可持续”四大特性,发挥最现代、最智能的汽车工厂制造优势,推动北京奔驰持续向高速度、高质量发展。本文主要以北京奔驰装焊车间为背景,讲述了北京奔驰不仅拥有着智能制造和绿色制造的先进生产工艺,还依靠Kibana 系统获取大数据信息,对现场设备进行智能化预防性维护,降低现场故障率,有效保证生产线顺利运行。
1 Kibana 系统介绍
Kibana 是一个开源的分析与可视化平台,和Elasticsearch 一起使用。可以使用kibana 搜索、查看、交互存放在Elasticsearch 索引里的数据,通过使用各种不同的图表、表格等,kibana 能很轻易地展示高级数据分析与可视化。采用Kibana 系统可使用户分析大量数据变得更加容易。同时,基于浏览器的接口,用户能快速创建和分享相关数据变化的动态仪表盘。不需要写任何代码,没有其他基础软件依赖。
Kibana 系统主要功能分为APM、Discover、Visualize、Dashbord、Canvas、Metrics、Logs。
APM:性能监控,从应用当中自动收集并监控各项性能和报警信息。
Discover:搜索数据,通过该项可以直接输入搜索条件,输入请求后,直方图、文档列表等可以按照新的搜索结果进行展示。
Visualize:可视化界面,通过该项用户可以根据自己的需求自定义可视化界面,方便用户分析使用数据。
Dashboard:仪表盘,通过该项可以展示保存的可视化结果集合,在编辑模式下,用户可以根据需要安排和调整可视化结果集,并保存仪表盘,以便重新加载和共享。
Canvas:用于图形的绘制,能够非常灵活地对柔性搜索里面的数据进行可视化布局与展现,可以实现非常酷炫的信息图效果。
Metrics:用户通过该项可以从服务器操作系统中获取到相关信息数据。
Logs:该界面可以从丰富的数据源中获取日志,并在仪表盘中以可视化界面形式展现出来。
本文主要讲述的是对Kibana系统中Dashboard仪表盘的应用,通过该功能展示给用户机器人报警信息及报警信息次数,用户通过这些数据,对其进行相应分析,并制定措施,从而降低现场停机率。基于MFA 装焊车间相关设备创建的Dashboard 界面如图1 所示。

图1 创建的Dashboard 界面
2 基于Kibana 系统数据分析及相应预防性维护措施
本文主要采用Kibana 系统将机器人常见的报警信息提取出来,并通过用户设定相关筛选数据,筛选出有用的信息,以柱状图的形式展现给用户,用户将得到的有用信息进行整理并指定相应的预防性措施,最后将这些信息发送给班组成员,利用班后非生产时间进行整改。
根据现场机器人实际使用情况以及CT 人员在Iportal 系统中所记录的关于机器人的故障信息,将机器人报警信息分为三大类,即EtherCAT bus error、Robot net lost、Speed of outer fan too low。EtherCAT bus error 主要是机器人内部系统报警信息,主要是由KSB KUKA 系统总线、KCB KUKA 控制总线运行过程中出现的总线闪断或断网等异常故障。2020 年CW47 周内报出的机器人EtherCAT bus error 信息如图2 所示。
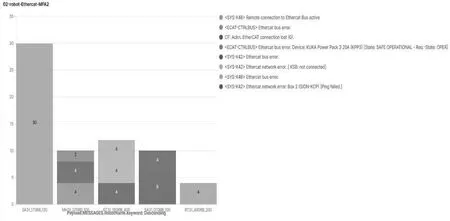
图2 EtherCAT bus error 报警统计
上述导出数据展示的是近一周EtherCAT bus error 报警信息前5 位的机器人,从图2 中可以看到,每个机器人所报出不同报警信息的次数以及通过右上角颜色报警信息备注可以得出每个机器人在近一周内详细的报警信息。通过这些报警信息,制定了相应的预防性措施,如插拔EtherCAT 网线,若下一周导出数据仍然有报警信息,便将该网线进行更换。
现场通过机器人报出的警报最多的还有机器人各个子站掉网情况,该故障报出时并不能当下使生产停止,这是因为这类报警信息开始时机器人在本身扫描周期内无法快速捕捉到报警信息,而Kibana 却能够快速捕捉到,因此开始出现故障报警时并不能够立即打断机器人正常运行,但是如果不能及时处理,会严重影响生产。所以,通过Kibana 能够提前捕捉到机器人与子站之间发生过网络闪断的次数,根据捕捉的信息给出相应的预防性措施。2020 年CW47 周报出的机器人Robot net lost 报警信息如图3 所示。
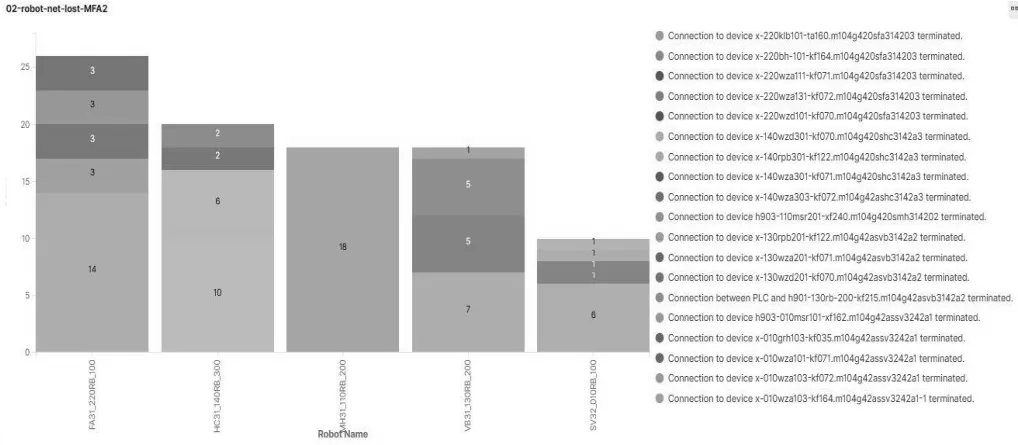
图3 Robot net lost 报警统计
由图3 可知,不同颜色代表机器人不同的子站设备,数字代表着断网次数。需要对比现场,查看机器人网络物理连接顺序,综合判断机器人具体掉网子站位置,找到故障点后,重新插拔网线,断电重启相应子站设备,若每周断网次数持续增长,那么必须考虑更换网线或子站模块。
为了保证机器人控制柜更好地散热,KUKA 机器人研发团队对机器人控制柜设置了3 个风扇,分别为外部风扇、内部风扇以及PC 风扇,外部风扇主要实现控制柜与外界的热量交换,将机器人控制柜内的热量带到外部;内部风扇主要助力控制柜与外界进行空气交换,将PC 机产生的热量带到风道;PC 风扇主要将CPU 产生的热量排出到PC 机。控制柜散热时需通过风扇与外界进行空气交换,由于装焊车间空气中有少量灰尘,导致控制柜吸入空气时灰尘难免会落到风扇轴承处,随着生产进行,如果不能及时发现清理,灰尘会越积越多,最终导致外部风扇运行速度过慢甚至停止,严重影响控制柜散热性能。控制柜不能及时散热,温度会升高,导致机器人驱动温度过高而报警,使机器人停止工作,严重影响生产。
因此通过捕捉Kibana 数据,可以提前得到外部风扇报警信息,需提前清洁机器人外部风扇,保证风扇正常运行,从而避免了由于机器人控制柜温度过高引起的停机。2020年CW47 周报出的机器人Speed of outer fan too low 信息如图4 所示。

图4 Speed of outer fan too low 报警统计
3 数据分析成果
Kibana 系统自 2020 年 CW37 周开始被应用于 MFA 装焊车间,通过链接不同设备的故障数据源,捕捉相应的故障信息,并通过Kibana 系统内部数据整理,将结果展示给用户。
本文主要讲述的是Kibana 系统每周捕捉机器人故障信息,并反馈给用户,根据现场实际需求以及装焊车间班组实际工作量问题,针对每种机器人报警信息均提取报警次数前5 位即故障Top 5,并发送给各个班组,并针对相关故障信息进行相应预防性处理。由于2020 年CW40 周是十一黄金周假期,同时在CW42 周对Kibana 系统进行维护,提取数据时剔除了CW40 周、CW42 周。经过CW37~CW48周预防性维护,三种不同报警信息每周报警次数趋势如图5 所示。
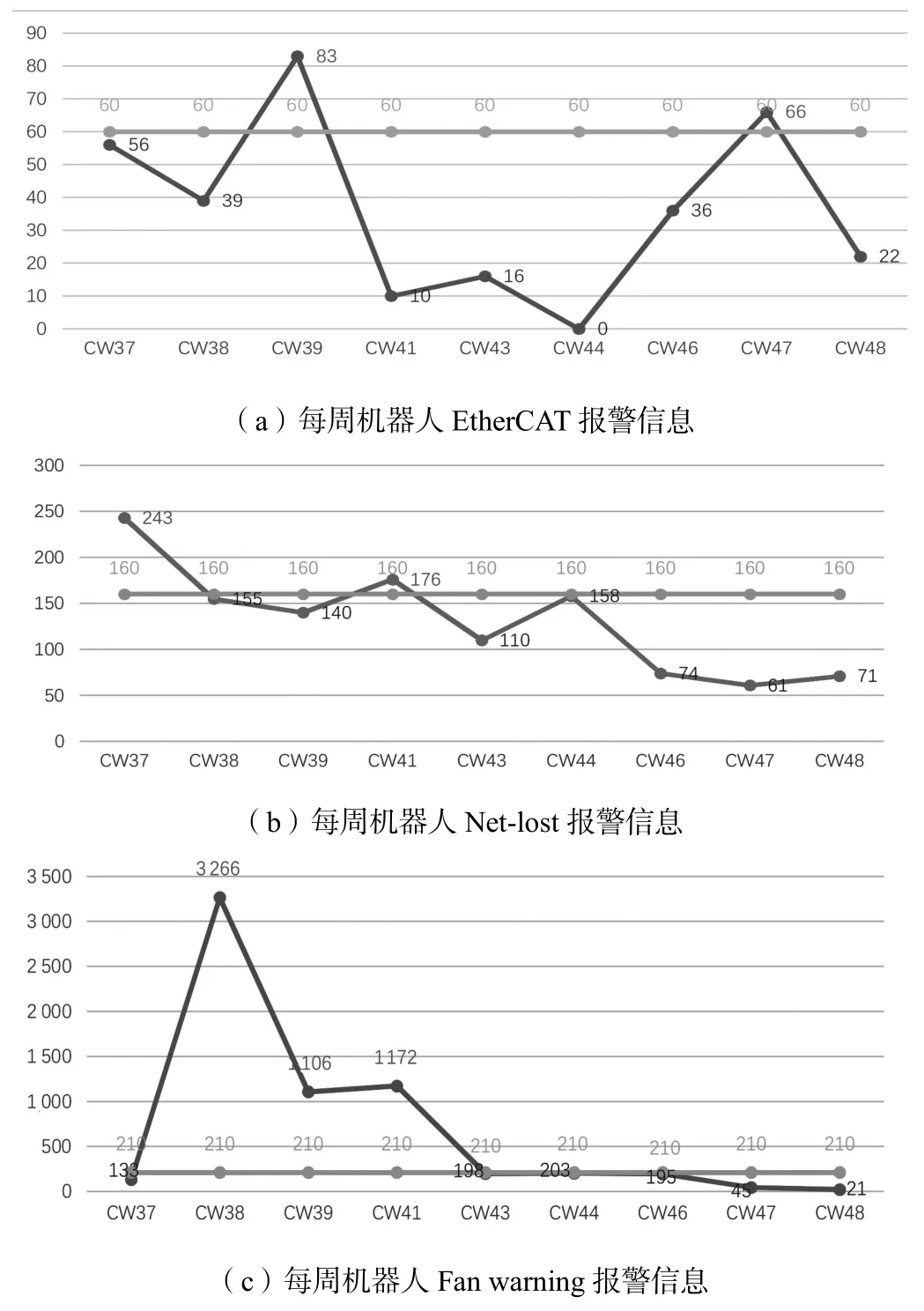
图5 机器人报警信息次数趋势图
图5(a)展示的是每周机器人EtherCAT 报警信息,通过该图可以看出灰色标记的是EtherCAT 目标值,该值主要根据现场实际经验以及每天CT 人员统计的Iportal 数据选取,该报错信息每周报警次数低于该值,认为线体正常运行,则不需要班组着重关注。图中有两周的报警信息超出了目标值,显然需要班组及时去关注。通过Kibana 系统数据导出,很容易捕捉到CW39、CW47 周机器人的报警记录。如CW39周总共报出83 次,CW47 周总共报出66 次,超过了目标值,此时需要具体分析这2 周数据,掌握报警记录的数据源,采取相应措施进行维护。
图5(b)展示的是每周机器人Net-lost 报警信息,该图仍然设定了一个目标值,该值同样根据实际经验以及CT 人员统计的Iportal 数据选取。通过导出系统数据,很容易捕捉到CW37 周、CW41 周机器人Net-lost 报警信息次数超出目标值。此时需要具体分析故障数据源机器人子站异常情况,根据采集到的具体信息采取相应措施进行维护,以确保第二周不会出现同样的故障。
图5(c)展示的是每周机器人Fan warning 报警信息,根据现场生产经验的积累,该报警信息目标值为210,高出这一设定值时,需要对本周的报警机器人进行具体分析及预防性维护。采取相应预防性措施后,自CW43 周开始,每周报警次数均低于设定值。
4 结束语
在大数据时代,现场故障信息与大数据相结合是必然的趋势,大数据设备故障分析及预防性对策也将成为未来车企行业中日常维护的主流。大数据需要结合现场设备故障信息,两者相辅相成,各自有其需要的部分。结合后可看到,通过大数据采集与分析,找到设备故障发生规律,同时分析出故障发生前的征兆,总结规律,制定出相应的预防性措施,减少现场停机率,实现北京奔驰“智能制造与绿色制造”的理念。
猜你喜欢
现代仪器与医疗(2022年3期)2022-08-12
阅读(低年级)(2022年6期)2022-06-17
中国药学药品知识仓库(2022年10期)2022-05-29
交通科技与管理(2022年8期)2022-05-07
锦州医科大学报(2022年2期)2022-05-07
建材发展导向(2021年22期)2022-01-18
中国品牌(2021年6期)2021-08-06
现代职业教育·中职中专(2018年7期)2018-05-14
科学与财富(2017年24期)2017-09-06
电脑知识与技术(2017年13期)2017-07-12
