
基于多尺度深度卷积神经网络的故障诊断方法
2021-10-11 09:49卞景艺刘秀丽徐小力吴国新
振动与冲击 2021年18期
卞景艺,刘秀丽,徐小力,吴国新
(北京信息科技大学 现代测控技术教育部重点实验室,北京 100192)
行星齿轮、轴承被广泛应用于风力发电机组,航空设备,工程机械设备中。在低速重载的恶劣工作环境中,容易出现磨损或疲劳裂纹等故障。因此针对其进行的故障诊断方法研究,对于提高设备的可靠性以及经济效益具有重要意义。
传统的故障诊断方法分为三个步骤:①通过对信号的降噪,分解等实现对信号的预处理。②将预处理完毕的信号通过一定特征提取方法获得其时域、频域、或其他的特征。特征提取的方法有:小波变换(wavelet transform)[1-2],同步提取法(synchro extracting)[3-4]、经验小波变换(empirical wavelet transform)[5-6]等。这些方法是对信号的无用特征又一次过滤,使得所需故障特征更为明显。③将最终提取的特征输入到基于机器学习的分类器中进行训练,通过训练分类器实现对故障的类型的识别。已经有反向传播神经网络(back propagation neural network,BP-NN)[7-8]、支持向量机(support vector machine,SVM)[9-10]被应用于故障分类当中。以上方法具有特征提取操作简单,分类器参数容易调节的特点,最终的诊断识别率可以满足大部分要求。但是上述方法仍旧割裂了故障特征提取与诊断识别两部分,在信号特征处理中需要大量的专家经验较为依赖人工,且人工提取特征的能力有限。
如今深度学习浪潮的到来,大量的深度学习模型被应用于自然语言处理、图像识别、无人驾驶等领域。深度学习通过模仿人脑的学习方式,构建深层网络模型,加之利用“大数据”训练模型,而获得数据中隐含的特征,是一种提取特征与模式识别为一体的智能模型。卷积神经网络(convolutional neural networks,CNN)[11-15]因其独特的卷积结构、权值共享、稀疏链接等特点使其对特征有强大的学习能力和较高的泛化能力,而被广泛的使用在图像识别领域。已有LetNet,AlexNet,GoogleNet等经典CNN网络模型在ImageNet图像识别大赛上获得不俗的表现。近几年有学者提出将卷积神经网络应用在故障诊断领域。如文献[16]对轴承滚动振动信号进行短时傅里叶变换生成二维图的时频图样本,再将二维时频样本放入二维卷积神经网络中进行训练最终实现故障诊断;文献[17]提出一种基于多小波变换(multi-wavelet transform,MWT)和CNN的滚动轴承智能复合故障诊断方法。对滚动轴承的振动信号进行MWT,得到相应的多小波系数分支,用所得多小波系数分支构造特征图,建立二维CNN分类器组模型,以实现滚动轴承复合故障的智能诊断。以上学者尽管使用了CNN网络,网络对故障信息提取的方式都局限在二维形式,在一维时序信息转换为二维形式的过程中会对故障信息产生遗漏,影响故障诊断的准确率,并且对信号特征的处理手法仍依赖人工操作,没有充分发挥出深度学习模型的强大特征提取能力与对特征的自我学习能力。文献[18-19]将原始一维振动信号直接放入浅层的一维CNN网络实现故障诊断。但针对原始一维振动信号多尺度复杂性的特点,单一尺度的特征提取无法充分的获取故障信息,故障特征提取效果仍有可提升之处。
本文针对不同的故障的特征在信号中所占的相对体积质量与位置不固定,以及噪声等因素所造成的原始一维振动信号具有多尺度复杂性的特点,对一维卷积神经网络进行改进,构建多尺度一维卷积神经网络:在网络的输入层构建多个含有不同尺度一维卷积核通道进行特征提取,将提取特征输入到具有更多尺寸卷积核以及多样池化层的特征处理层中进行特征处理,最后合并多通道所处理的特征,使网络完成自我学习实现故障诊断。此方法不依赖任何专家经验,并且多尺度的特征提取以及更高层级的网络结构设计丰富了诊断信息。对故障信号使用滑窗的方式构造数据集,使用数据集对网络进行训练,对比故障诊断精度以及使用流形学习的T-SNE(T-distributed stochastic neighbor embedding)观察网络特征提取效果,选出最优网络模型。实现行星齿轮箱多尺度特征提取与故障诊断。
1 多尺度一维卷积神经网络
1.1 卷积层与池化层
卷积核是构建多尺度一维卷积神经网络的主要部分其主要目的是提取信息特征。卷积核提取特征有两个特点稀疏链接与权值共享。卷积核与输入信息以局部链接的方式进行链接并进行滑动,其滑动时以权值共享的方式进行计算得到信息特征值。其计算过程如式(1)

池化层是对特征的二次处理操作,可以提高网络运算效率和使得特征更为有效。池化函数如式(2)中表示

1.2 卷积通道模型
使用卷积层与池化层等功能函数按照图1结构相互联结构成卷积通道实现特征提取。从图中可以看出第l层需要接受前面所有的x0,x1,x2,…,xl-1输出作为输入如式(3)

图1 卷积通道联结结构Fig.1 Convolution channel connection structure

式中:[x0,x1,x2,…,xl-1]为对第0,1,2,…,l-1层所提取的特征值进行合并;Fl为三个操作分别为批量归一化(batch normal),Relu激活函数以及卷积运算。
当复合函数Fl产生k个特征值时,会把k0+k×(l-1)的特征值输入到第l层中,其中k0为输入层的通道数;k为神经网络学习增长率。因为第l层接收到第0,1,2,…,l-1层的特征值输入,所以仅需要很小小的学习增长率就能达到可观的学习效果。对于故障分类任务通常使用Softmax函数给出最终结果,假设有n个样本其中i类别的输入概率为Pi计算公式为
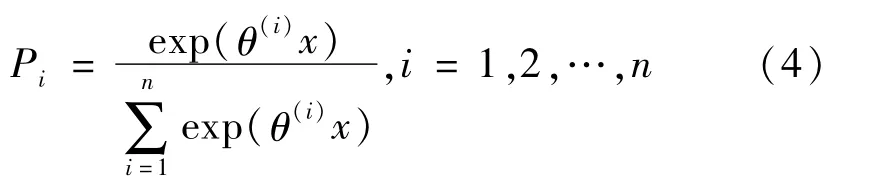
式中:θ(i)为网络模型参数;x为网络模型输出到Softmax的参数。
1.3 多尺度卷积神经网络
使用卷积层与池化层按照卷积通道模型构建出的经典模型,已经被广泛应用在图像识别领域。这些网络模型通过增加一定数量的卷积层与池化层以及添加Dropout、Relu等操作,将网络的深度增加,使得模型泛化能力与准确率提高到令人满意的结果。但当图像中重要特征部分大小差别很大时,如何选择合适的卷积核来提取不同大小的特征就成为一个新的问题。并且一味的增加网络深度会浪费大量的计算资源且会更容易造成过拟合现象。因此将网络在同一层级增加更多通道,每个通道使用不同尺寸的卷积核,使得网络变的更宽而不是简单的变得更深,实现对特征的多尺度提取,可以为该问题提供解决思路。
在机械设备的故障诊断中,不同的故障的特征在信号中所占的体积质量与位置不固定、噪声等因素所造成的原始一维振动信号具有多尺度复杂性,都会影响故障诊断准确率。本文提出使用多尺度卷积神经网络结构[20]改进1DCNN网络,从而构建多尺度一维深度卷积神经网络(M1DCNN)网络模型并将其应用于行星齿轮箱故障诊断。多尺度卷积神经网络结构,使网络可以获取更多尺度下原始一维振动信号故障特征,为智能体丰富故障诊断信息,如图2所示。图2中原始信号经三个不同尺寸卷积核n1Conv,n2Conv,n3Conv,进行多尺度的特征提取。

图2 多尺度故障特征提取流程Fig.2 Multi-scale extraction to extract fault features
2 基于M1DCNN的故障诊断方法
本小节提出基于多尺度一维深度卷积神经网络故障诊断方法,并将其应用于轴承故障、行星齿轮箱故障诊断当中。该方法通过在1DCNN改进构建M1DCNN,输入原始振动信号,对模型进行训练实现故障类型的分类。
2.1 M1DCNN网络结构
针对于行星齿轮、轴承故障诊断大多数使用的是一维振动信号以及一维卷积神经网络模型。于是将传统1DCNN改进,加入多通道以及多尺寸卷积核,构建多尺度一维卷积神经网络。网络结构如图3所示。

图3 M1DCNN网络结构Fig.3 M1DCNN network structure
该网络包含三个通道,每个通道都有一个特征提取层、两个特征处理层、特征合并层。每个通道特征提取层由不同尺寸的1DConvolution组成,其中通道1、通道2、通道3的1DConvolution尺寸依次减小,以获取不同尺寸下原始振动信号故障特征;通道1的1DConvolution的尺寸最大,直接使用1DConvolution进行特征处理,可以给网络提供信号的整体特征认知;通道2特征处理层中使用Maxpooling1D,是为在更小尺寸的卷积操作中对特征筛选出识别率更高的特征,可以给网络提供信号的局部特征认知;通道3中的1DConvolution的尺寸最小,为保证最小尺寸下的特征信息不被遗漏,使用Averagepooling1D对提取特征进行处理特征,维持了局部特征的完整性且减少了网络参数量。在特征合并层添加Global Average Pooling层把三个通道所获取的特征合并输入到全连接层,通过Softmax分类器输出故障类别与分布概率。该网络具有如下特点:
(1)通过多通道多尺度卷积结构对原始振动信号进行多尺度卷积解析,丰富网络故障诊断信息,采用Maxpooling1D、Averagepooling1D、1DConvolution三种方式对提取的特征进行处理[21],并对特征最后进行整合,使得网络进行更有效的特征学习。
(2)添加Global Average Pooling层对多通道提取特征进行合并,使网络模型减少训练参数,抗拟合效果更为优秀[22]。
(3)该网络从原始振动信号中获取故障特征,自身可以对特征进行学习,将特征提取与故障诊断融为一体。
2.2 本文方法
基于M1DCNN的故障诊断方法是由构建数据集、网络训练以及网络测试三部分组成:
(1)构建数据集。将原始振动信号分为训练集与测试集。输入信号为一维原始振动信号,故采取滑动窗口的模式在样本信号上截取数据集。为保证不遗漏故障特征,滑动窗口在截取时使所截去长度有所重叠。截取方式如图4所示。这种截取方式可保证故障特征在样本中的完整性,也保证了为网络训练提供足够数量的样本。

图4 滑窗截取示例Fig.4 Example of sliding window interception
(2)网络训练。构建网络结构并对网络参数初始化。其中特征提取层中的卷积尺寸采用多种组合来寻找最佳的卷积尺寸;依据构建网络经验Maxpooling层以及Average Pooling层的尺寸选择为6;Dropout系数为0.2;优化器选择为Adam;学习率使用指数衰减法开始设定为0.02衰减系数为0.90;总共进行80次训练,每一次输入10个样本,样本为从数据集中随机抽取获得。编译语言为Python模型运行框架为Keras+Sklearn;硬件环境为Intel Core i52.5 GHz+Inter iris Plus Graphics 655。
输入训练集样本对网络进行训练。网络经多次反向传播更新选择出最优的参数,输出故障类型以及诊断准确率,并使用T-SNE来可视化网络内部对特征的学习效果。
(3)网络测试。将测试集输入完成训练的网络中输出故障类型以及准确率,并使用T-SNE可视化网络对特征的学习效果。对比网络诊断的准确率,并观察T-SNE分析结果,确定网络对特征的学习效果与准确率。流程如图5所示。
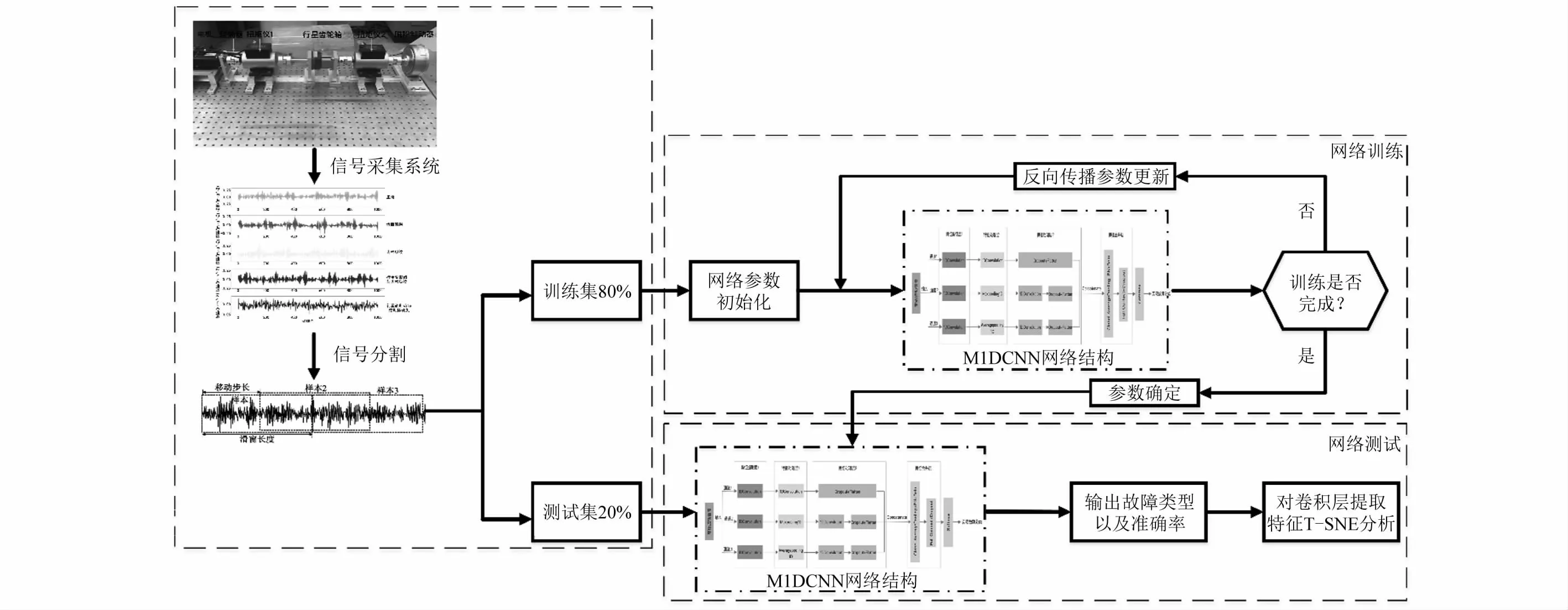
图5 方法流程Fig.5 Method flow
3 试验验证
本次试验使用美国凯斯西储大学的轴承故障数据与实验台所采集的行星齿轮箱故障数据。图6为凯斯西储大学轴承试验台。平台由1.5 kW电动机,扭矩传感器,功率测试计组成。驱动端轴承采样频率为12 kHz和48 kHz,风扇端采样频率为12 kHz。

图6 西储大学轴承试验台Fig.6 Bearing test bench of Western Reserve University
行星齿轮箱故障数据来自试验台,如图7所示。电机、扭矩仪、行星齿轮箱、磁粉制动器通过联轴器相互联结实现传动。行星齿轮箱的两侧扭矩仪对行星齿轮箱的输入轴与输出轴施加径向载荷,磁粉制动器施加轴向载荷。行星齿轮箱基本参数见表1。

图7 行星齿轮箱试验台Fig.7 Planetary gearbox test bench

表1 行星齿轮箱基本参数Tab.1 Basic parameters of planetary gearbox
3.1 故障信号采集
轴承故障数据集选用凯斯西储大学数据集中转速为1 750 r/min,采样频率为12 kHz的正常轴承、内圈故障、滚动体故障、轴承外圈故障中心方向、轴承外圈故障正交方向共五种故障类型,其中故障数据的故障尺寸为0.177 8 mm,故障深度为0.279 4 mm。其轴承故障数据集基本信息,如表2所示。
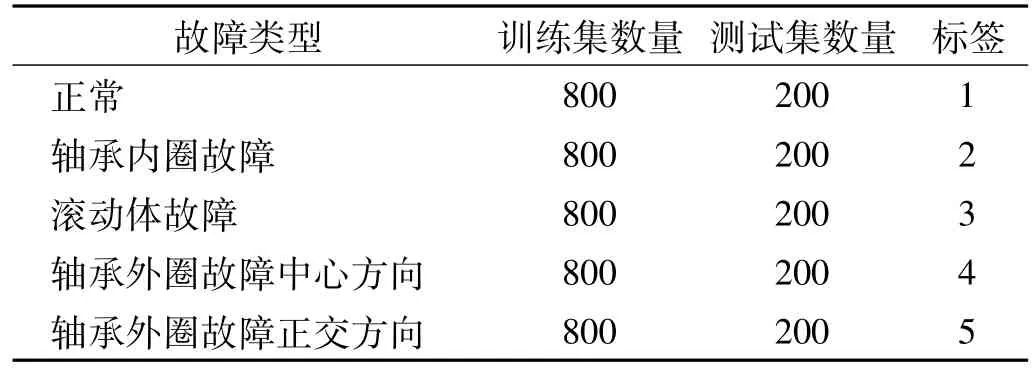
表2 轴承故障数据信息Tab.2 Information of bearing failure data
通过在行星齿轮箱放置三向加速度传感器收集纵向振动信号构建试验数据集。通过替换故障件来模拟行星齿轮箱故障,故障类型分别为滚动体缺失、齿面磨损、行星齿轮与断齿、行星齿轮与齿面磨损。试验台采样频率设置为20.48 kHz,电机转速为1 980 r/min。每组采集到的振动为327 675个点,样本分割窗尺寸选择为512个点,总共生成4 000个样本其中训练集包含3 200个样本,测试集包含800个样本。数据集基本信息如表3所示。网络模型的输入为样本所包含的数据点数为512,模型输出的分类器神经元数为标签个数5。图8为采集信号时域图示例。

图8 采集时域信号示例图Fig.8 Example of acquiring time domain signals

表3 行星齿轮箱故障数据集信息Tab.3 Planetary gearbox failure data set information
3.2 网络优化
通过将样本数据输入网络,进行80次训练和测试,得到训练准确率、测试准确率、训练损失值、测试损失值。分别取每组实验的最后十次测试集的准确率取平均值,结果如表4所示。可以得出:当采用不同尺寸的卷积核(试验1、试验2、试验3)时的诊断准确率高于采用统一尺寸卷积核(试验4)时的准确率。因此,不同尺寸的卷积核来组成特征提取层能提高网络的诊断准确率。

表4 多组卷积核尺寸诊断效果Tab.4 Diagnosis effect of multiple sets of convolution kernel sizes
3.3 对比分析
本次实验建立BP神经网络,循环神经网络(recurrent neural network,RNN),一维卷积神经网络与M1DCNN网络进行对比。各网络参数设置如下:BP神经网络的输入层神经元数为1 024,隐藏层单元数依次为512,256,激活函数为Relu,输出层使用Softmax分类器;循环神经网络三个全连接层神经元个数分别为512,256,128,激活函数选择Relu,全连接层之间添加GRU(gate recurrent unit)代替LSTM进行训练,因GRU相比于LSTM减少了一个门使得计算维度减少,输出层使用Softmax分类器;一维卷积神经网络输入层为含有512个神经元的全连接层,之后连接完成堆叠的4个卷积层,卷积层为步长16卷积核,数量为32,激活函数选择Relu,并在卷积层之间添加大小为1×3的池化层,在池化层后添加Dorpout设置系数为0.2,最后添加神经元数为5的全连接层与Softmax分类器。
为比较1DCNN网络与M1DCNN网络对于故障特征的学习效果,提取完成训练的两种网络的全连接层特征进行T-SNE可视化分析,如图9所示。从图中可以看出M1DCNN网络模型对五种故障提取的特征无重合边界,类与类之间间距更大,优于1DCNN网络模型,因此获得更明显的决策边界影响了最终模型的诊断准确率。
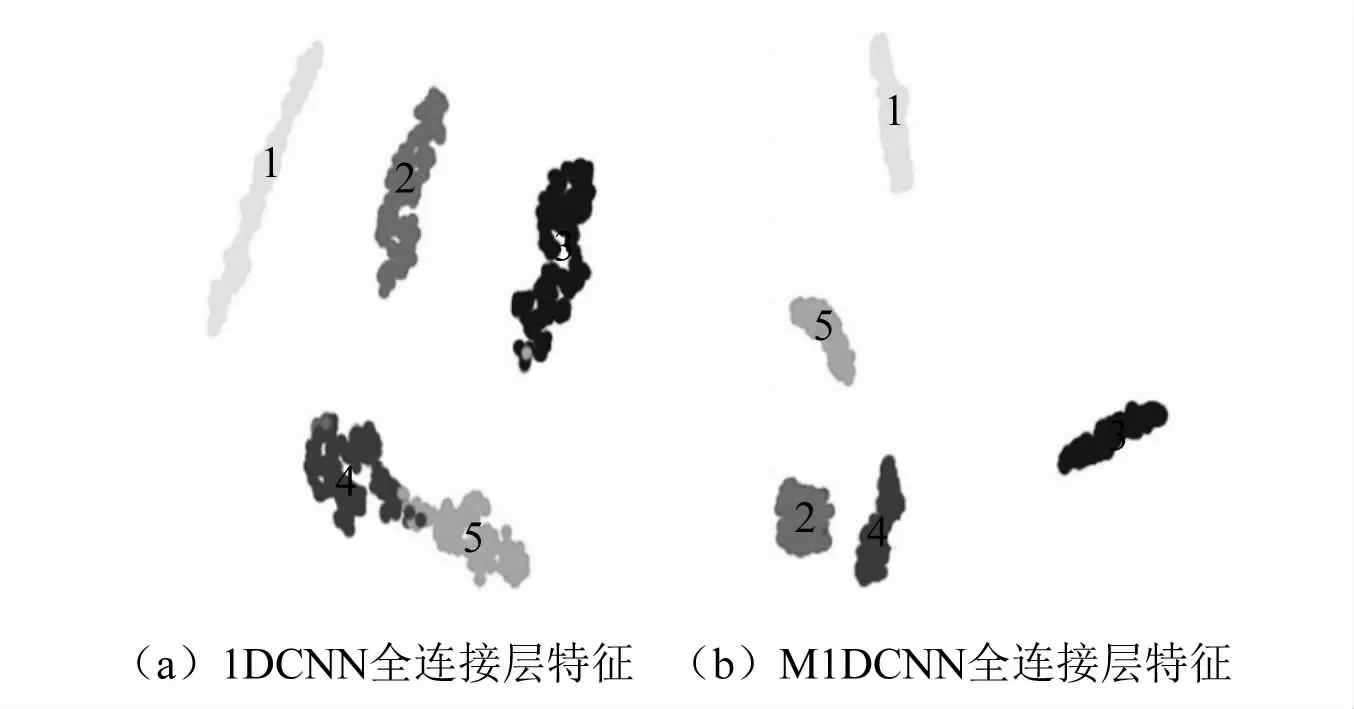
图9 行星齿轮箱数据集网络T-SNE分析Fig.9 T-SNE analysis of the planetary gearbox data set network
使用轴承数据集与行星齿轮箱对上述各个网络进行训练结果如图10、图11所示。在图10、图11可以得出M1DCNN网络可以实现对轴承故障与行星齿轮箱故障的诊断说明网络具有泛用性,且其损失率都较低,具有良好的鲁棒性。从对比网络训练结果可以得出本文提出的M1DCNN网络相比普通的1DCNN模型在诊断准确率、损失率优于其他网络,说明网络的诊断精度与鲁棒性都优于其他网络。
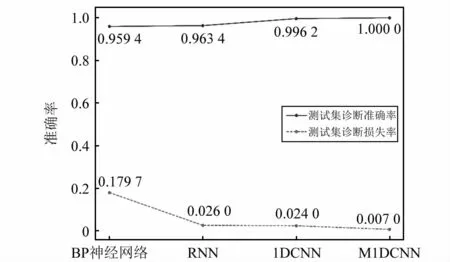
图10 轴承数据集网络训练结果Fig.10 Network training results of the bearing dataset

图11 行星齿轮箱数据集网络训练结果Fig.11 Network training results of planetary gearbox dataset
结合图9与图10、图11分析,M1DCNN相比BP神经网络、循环神经网络、1DCNN在诊断准确率上具有一定的优势,主要原因为两点:①BP网络与循环神经网络针对原始振动信号缺乏有效的特征提取方法,对故障特征认知不够充分;②使用多尺度卷积解析故障特征以及多样特征处理方法,可以提高网络对于故障特征的学习效果,从而提高了诊断精度。
图12为M1DCNN的行星齿轮箱数据集训练过程。由图12可知模型经过十次训练的诊断准确率均已经达到97%以上,之后的训练中模型准确率总体呈上升趋势,损失值也呈下降趋势。最终模型在最后十次的训练趋于稳定,其训练集的平均准确率已经达到100%,测试集平均准确率达到99.84%,损失值在之间浮动趋向稳定。因此可以断定模型的诊断精度较高,同时具有较好的鲁棒性。

图12 IM1DCNN训练过程Fig.12 IM1DCNN training process
4 工业现场应用
为验证本文方法在实际工程中应用效果,将该方法应用到工业现场风电机组齿轮箱监测数据中。该风电机组位于张北某风场,型号为SL1500/77,齿轮箱采用两级行星齿轮加一级斜齿轮传动。齿轮箱采用两级行星齿轮加一级斜齿轮传动。该风机的启动运行过程中在700~800 r/min时有异响。风机参数如表5所示,齿轮箱结构参数如表6所示。使用东方振噪所14个加速度振动传感器以及一个电涡流位移传感器进行现场数据采集以及远程数据采集。设定采样频率为16 384 Hz,采样长度为1 min,采样间隔为29 min,采样次数为5 000次。采样通过3D上网卡进行远程控制以及数据传输传。感器布点如图13所示。

表5 风电机组参数Tab.5 Wind turbine parameters

表6 齿轮箱结构参数图Tab.6 Structure parameter diagram of gearbox
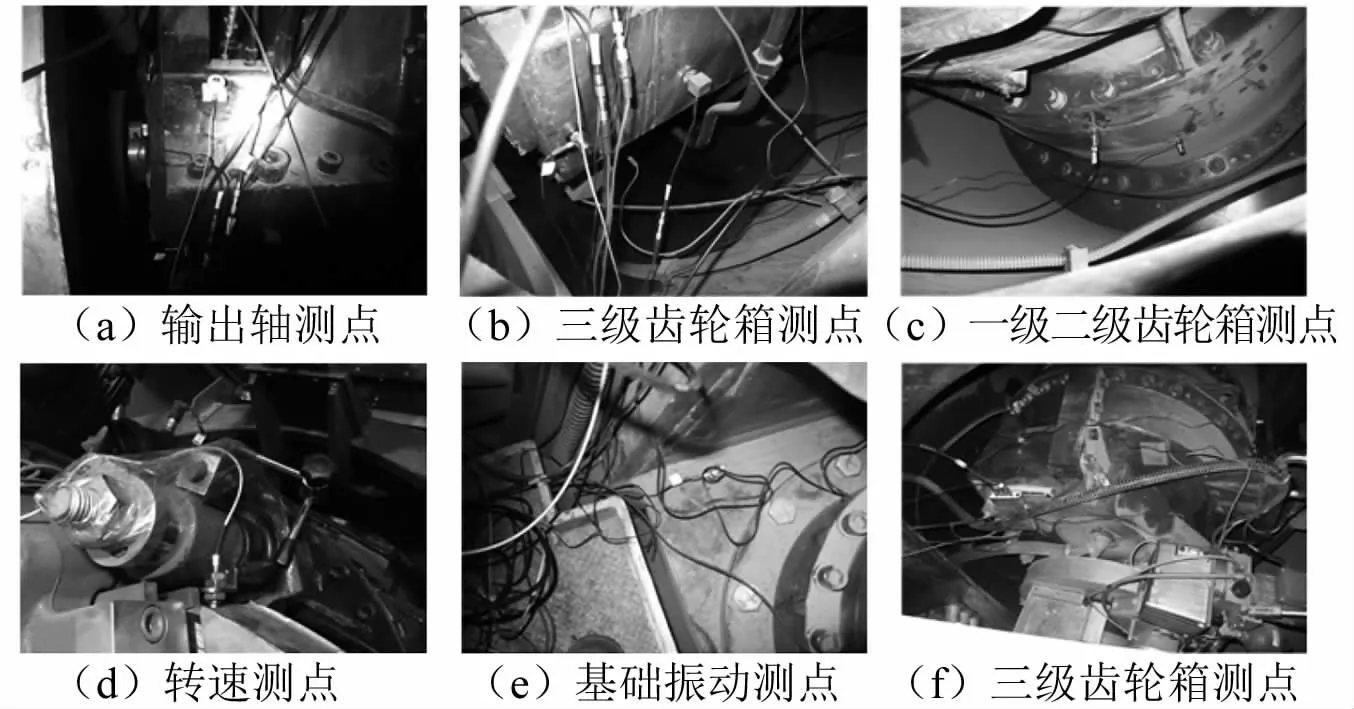
图13 传感器布点位置图Fig.13 Sensor location map
对所采集数据依照2.2节所述,构建数据集并进行网络训练。最终网络对监测数据的诊断结果为该风机存在齿轮磨损故障。经查阅相关现场维修记录,发现该风机确实存在第二级太阳轮微磨损故障。证明了本文方法在工程应用中的有效性。
5 结 论
本文提出基于多尺度一维深度卷积神经网络用于行星齿轮箱的故障诊断,以解决一维卷积神经网络对于不同故障类型信号中故障特征所占特征的相对体积质量不同,导致特征提取不够充分的问题。首先通过对行星齿轮箱内部结构加工故障模拟故障并采集振动信号构建数据集,之后构造M1DCNN网络,对网络模型内部参数优化,最终对网络进行训练测试并与其他网络针对特征提取能力以及诊断准确率与鲁棒性表现进行对比。
最终结果表明:
(1)本文提出的M1DCNN网络的诊断精度优于BP神经网络、循环神经网络、1DCNN网络,且具有较高的鲁棒性。
(2)通过T-SNE可视化分析M1DCNN和1DCNN网络的特征的学习效果,得知M1DCNN的特征学习效果优于1DCNN网络。
(3)基于M1DCNN网络的故障诊断方法是将特征提取与故障诊断融为一体的智能诊断方法,相较于传统方法不需要大量的专家经验。
猜你喜欢
山东冶金(2022年3期)2022-07-19
一重技术(2021年5期)2022-01-18
电子制作(2018年19期)2018-11-14
制造技术与机床(2017年4期)2017-06-22
自动化学报(2017年11期)2017-04-04
风能(2016年12期)2016-02-25
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28
噪声与振动控制(2015年4期)2015-01-01
振动、测试与诊断(2014年5期)2014-03-01
振动、测试与诊断(2014年4期)2014-03-01
