
基于船波相对运动的砰击压力和上浪载荷预报方法
2021-10-11 07:23任慧龙张楷红彭亚康
船舶力学 2021年9期
黄 强,任慧龙,李 辉,张楷红,彭亚康
(1.北京强度环境研究所,北京 100071;2.哈尔滨工程大学船舶工程学院,哈尔滨 150001)
0 引 言
在目前对砰击载荷的研究过程中,试验仍然是相对比较成熟和准确的研究方法之一。在砰击载荷试验中,目前常用的是针对某个区域,通过在该区域上布置大量的压力测量传感器,可以得到测量点压力的时历变化和空间上的分布特征,但此种测量方法比较复杂,需要在船体外壳布置测点,会破坏船体外壳的光顺性,并且当测点很多时,操作会更加困难,既不实用也不经济[1-4]。
甲板上浪是运动着的船体与波浪相互作用而产生的一种高度非线性现象。随着船舶向高速化发展,以及在恶劣海况中作业的深海石油平台的广泛应用,由该种载荷引发的结构破损事故时有发生,因而对这种强非线性载荷的研究越来越受到关注。由于船舶甲板上浪的海水流动是高度非线性物理现象,与之相关的水位、流量等物理量很难精确估算。甲板上浪是指波浪实体涌上甲板,为求得船舶发生上浪时甲板所受的载荷,需要对船舶甲板上浪流体的时空分布进行预报[5]。
本文给出了一种新型船舶砰击压力试验预报方法,通过固连在船体上的浪高仪测出船波相对运动,然后据此求出船波相对速度,利用LS-DYNA对待测点所在的二维剖面进行入水砰击过程仿真,可以求得各个测点的砰击压力系数,最后利用船舶砰击载荷直接计算方法求得各个测点的砰击压力。此种方法适用于很多测点位于同一剖面的情形,解决了测点很多时传统测量方法操作困难的问题。对于甲板上浪载荷的预报,本文基于Ochi提出的甲板上浪载荷理论,将此方法与模型试验结果进行了对比分析,最后结合溃坝模型给出了一种上浪载荷预报方法。
1 船波相对运动
1.1 船波相对运动原理
设砰击发生时刻为t,船体上刚好接触水面的点的坐标为P(xb,yb,zb)。船体表面点P(xb,yb,zb)的垂向位移为[6]

因此,船体表面点P(xb,yb,zb)的垂向线速度和船波相对位移为

根据线性理论,规则波中船体坐标原点处的垂荡、横摇和纵摇运动可表示为

式中,Rz、θ(t)、ψ(t)、εz、εθ和εφ分别为单位波幅下的运动振幅和相位,可以通过三维势流方法计算得到。
根据非线性理论,不规则波中船体坐标原点处的垂荡,横摇和纵摇运动可表示为

式中,Razi、Raθi、Raφi、εzi、εθi和εφi分别为单位波幅规则波ωi下升沉、横摇、纵摇运动的幅值和相位响应。
此时,船体表面点P(xb,yb,zb)在波浪前进轴上的位置为

则波浪运动的位移为

对于规则波,波浪水质点运动的垂向速度为

对于非规则波,可取波浪谱中特征频率对应的规则子波时的值。则P(xb,yb,zb)点船舶与波浪运动的垂向相对速度为

1.2 船波相对运动预报
按照上述船波相对运动预报方法,本文以一艘长艏楼型船的模型试验为例进行详述。本次模型试验的船模缩尺比为1∶25,采用自航形式模拟实船在海洋环境中航行时船体的运动,记录其船波相对运动和砰击压力,模型总布置图如图1所示。针对长艏楼型船舶具有较长艏楼的特点,对距艏垂线0.15L的船体艏部外飘上的砰击载荷进行研究。本次试验在船模上确定了19个压力关注位置,测点在实船上的2D分布如图2所示,在模型上的具体布置如图3所示。

图1 模型布置图Fig.1 Model layout

图2 测点分布Fig.2 Measuring point distribution

图3 测点在模型上的位置Fig.3 The positions of measuring points on the model
上述每个测量点均采用同一型号的压力传感器测量船体砰击压力,为了测量船体相对于波浪的相对运动,本项试验采用电阻式浪高仪对船波相对运动进行测量,这里选取第20站位置布置浪高仪,具体布置如图4所示。

图4 浪高仪布置Fig.4 Wave height recorder arrangement
当船体在波浪上运动时,由于实际船舶的纵摇和首摇角很小,可近似认为切片作平面运动,在随船平动坐标系下,整个切片的水平和垂向位移分别为v(t)、w(t),据刚体运动学可知,船体每个剖面的位移和速度如式(11)所示[6]:

因此可以近似认为船体同一剖面的各个点的垂向运动速度相等,故采用浪高仪来测量船舶与波浪的相对运动,据此可以判断该位置是否发生上浪现象及对应的上浪高度,并且将相对位移对时间求导可以得到船波相对运动速度。
为了验证浪高仪测得的船波相对运动准确性,选取20站剖面10 m水线处的测点3为例,将采用三维势流理论求得的船波相对运动和试验中适航仪测得的结果与浪高仪测得的船波相对运动进行对比,采用三维势流理论求得的不同航速时单位波幅船体的垂向运动分别如图5所示。

图5 单位波幅垂向位移和垂向转动角度Fig.5 Unit wave amplitude vertical displacement and vertical rotation angle
选取波长船长比为1.0时单位波幅运动的幅值,将其代入式(5),可得船体的运动,将其与浪高仪测得的船波相对运动幅值进行对比,如图6所示(本文中所列举数据均为实船数据)。


图6 船波相对运动Fig.6 Ship wave relative motion
从图6可以看出,采用随船浪高仪测得的船波相对运动幅值与理论计算的幅值在船艏入水时较为接近,此时发生砰击和上浪。而采用随船浪高仪测得的船波相对运动幅值与理论计算的幅值在船艏出水时存在一定误差,通过观测试验录像发现,在大波高时船舶运动响应很大,船艏存在严重的出水现象,而浪高仪则在船艏出水过程中,其测量端也随着船艏运动出水,使得测得的出水过程幅值小于理论计算的结果,通过波高为6.4 m和3 m时的结果对比可以验证该猜测。
从图中可知采用理论预报船波相对运动与试验采用浪高仪方法在时间上有所差别,观察发现,试验时船舶相对于波浪的速度并不是一直不变的。由于砰击和上浪发生在船艏入水的过程中,砰击压力极值和上浪高度大小均不受其发生时刻的影响,只与船艏入水时的船波相对运动有关系。因此采用此方法能较好地预报船舶的砰击压力和上浪高度,根据采用浪高仪测相对运动的方法求得测点3处的砰击压力与理论计算幅值也比较接近,表明了采用随船浪高仪测量船波相对运动具有一定的可靠性。
2 船舶砰击压力预报
大量理论计算和模型试验的研究表明,砰击压力峰值P与船波相对速度V平方成正比,满足经验公式:

式中:K为砰击压力系数;V为砰击速度,单位为m/s;ρ为水的密度。
砰击压力直接计算方法是指为了得到砰击压力,对砰击压力系数和砰击速度分别进行求解的方法。在本方法中,砰击速度采用船波相对运动方法确定,砰击压力系数采用二维剖面数值仿真方法确定。
2.1 砰击压力系数的预报
通过经验公式(12)的推导,不同位置的砰击压力系数都可以按式(13)计算:

式中:P为数值仿真中基于假设砰击速度预报的砰击压力值,单位为kPa;V为2D分析中砰击速度的假设值,单位为m/s。
本文采用ANSYS/LS-DYNA软件对长艏楼型船艏部均匀入水的过程进行仿真,从而获得不同位置的砰击压力系数。在对外飘结构的研究中,为忽略球鼻艏对砰击载荷的影响,需把具有球鼻艏剖面的底部曲线处理成圆底形式、光滑过度或尖底形式。
本文挑选长艏楼船明显外飘区域的第20站上的3个测点进行分析,具体位置如表1所示。

表1 测点位置Tab.1 The measuring point positions
本文使用ANSYS/DYNA软件模拟20站所在剖面进行仿真,其剖面原始形状如图7(a)所示,由于其剖面具有球鼻艏结构,需要对其底部进行光顺处理,处理后的剖面形状如图7(b)所示。将20站所在的剖面曲线数据导入前处理软件中,建立局部坐标系,将计算点作为监测点,对其所在位置的压力进行实时监测,通过监测点坐标和曲线上坐标建立整个计算边界,对计算剖面附近的网格采用加密处理,并对相应的区域进行水、空气和自由液面定义,其网格划分和区域定义后的图像如图8和图9所示。
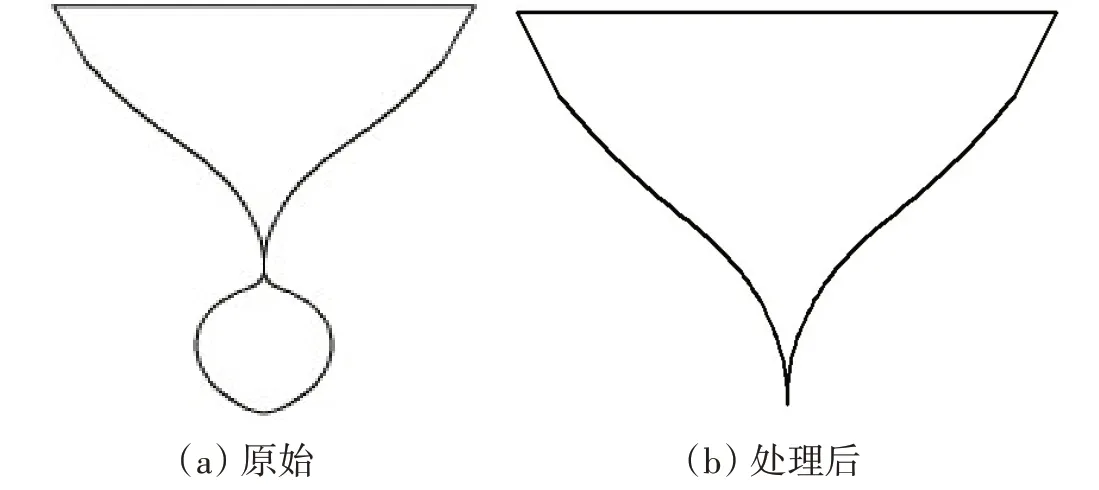
图7 剖面形状Fig.7 Section shape

图8 计算网格划分Fig.8 Computational grid division

图9 空气和水的定义Fig.9 Air and water definition
根据多次计算经验,设置时间步长为0.002 s,计算时间0.8 s为宜,剖面入水的初始速度为16 m/s,并使用ANSYS/LS-DYNA进行计算,最后输出监测点处的压力时历。其中,剖面入水砰击过程如图10所示。

图10 砰击发生过程Fig.10 Slamming process
通过软件仿真得到监测点处的压力时历如图11所示,由于在仿真过程中入水砰击速度等于给定速度,因此可通过式(13)计算得到砰击压力系数,如表2所示。

图11 测点的砰击压力时历Fig.11 Slamming pressure time history at the measuring points

表2 测点的砰击压力系数Tab.2 Slamming pressure coefficients at the measuring points
2.2 砰击压力试验预报
本文测得了规则波中第20站剖面处点3的压力时历信号和船波相对运动。为了验证上述方法的正确性,将船波相对运动和测点3的砰击压力画在同一坐标系下,具体如图12所示,H表示浪高仪测得的相对运动时历,P表示压力传感器测得的测点3的砰击压力时历。

图12 船波相对运动和测点3的砰击压力Fig.12 Relative motion between ship and wave and slamming pressure of Measuring Point 3
从这些不同计算工况的船波相对运动和测点3处的砰击压力曲线中,可以看出当船艏从平衡位置向水面运动时,浪高仪的示数随着增大;当测点接触水面时,砰击压力急剧增大至最大值,此刻,从图中可以看出砰击速度达到最大,并且此时对应的船艏还未运动到最大位移处,整个过程发生时间极短,随后砰击压力开始衰减,直至对应的测点出水,砰击压力变为0。
将利用浪高仪测得的船波相对运动计算的测点3处的砰击压力峰值与试验测得的结果进行对比,如图13所示。

图13 测点3处的砰击压力峰值Fig.13 Peak pressure at Point 3
从这些不同试验工况中压力传感器测得的砰击压力与采用浪高仪测得的船波相对运动求解的砰击压力对比图中可以发现,采用浪高仪测船波相对运动求解得到的砰击压力峰值与采用压力传感器测得的砰击压力峰值相差不大,证明了采用浪高仪来测量船波相对运动的方法是可行的,为模型试验中测量船波运动提供了一种方法,同时也提供了一种新的砰击压力试验预报方法,大大简化了其操作的难度。
2.3 砰击时间理论预报
为了后期的结构强度校核,进行砰击压力预报时除了需知道压力的峰值之外,还需要知道砰击的持续时间,才能够得到砰击的曲线,但是目前对于砰击持续时间的预报,仍沿用Ochi基于砰击压力试验提出的底部砰击压力作用时段经验公式和Kawakami提出的非对称分布以及与船长有关的压力作用时间经验公式。目前砰击时间分布的研究大多是关于底部砰击,而对于外张砰击的时间分布的计算却很少,并且底部砰击时间经验计算公式并不适用于外张砰击。目前国内Chen[8]提出过一个与垂向船波相对速度有关的外张砰击压力持续时间经验公式,但是该方法存在一定的局限性。因此急需一种适用于预报外张砰击持续时间的计算方法。
本文基于船波相对运动理论,以及对砰击过程的分析,提出了一种预报外张砰击持续时间的理论方法。通过对外张砰击过程的分析,发现了只有当水面高度超过监测点时,才会产生砰击压力,因此只要确定船波相对运动的位移是否超过船舶静止时监测点距离水面的高度,以及从船波相对运动的位移刚好超过船舶静止时监测点距离水面的高度的时刻起到刚好没超过的时间差,就可以确定船舶外张砰击持续时间。利用上述方法本文给出了不同计算工况时监测点3的砰击压力持续时间,并与试验结果和Chen经验公式(式(14))计算结果进行了对比。

式中,V为船体与波浪的垂向相对速度。
根据船波相对运动理论预报可知船波相对运动的位移和船舶静止时监测点距离水面的距离,将两者相减可知砰击压力持续时间,具体如图14所示。ΔH和Δh分别表示船波相对运动的位移和船舶静止时监测点距离水面的距离。

图14 砰击时间Fig.14 Slamming time
将船波相对运动对时间求导可得船波相对垂向运动速度,代入式(14)可得砰击时间,具体结果如表3所示。

表3 砰击时间对比Tab.3 Slamming time comparison
通过上面的计算结果可以看出,本文提出的外张砰击压力持续时间计算结果与试验结果非常吻合,证明了该方法满足工程计算要求。
3 船舶上浪载荷预报
在计算得到船波相对运动后,可以获得甲板上浪的高度。通过上浪在甲板上的流动理论,本文主要运用溃坝模型来模拟得到上浪流体在设备处的速度,最后分别计算上浪冲击载荷和垂向上浪载荷。
3.1 溃坝模型改进
溃坝模型中对上浪流体在甲板上的流动模拟是基于船舶处于无航速迎浪航行状态下艏部甲板的上浪[5]:

式中,H0为坝初始高度(m),通过x=0处的高度计算可知,H0=9he/4。
可知坝址处的流体速度(或称之为上浪流体的初始速度)为Vc=ghe,而对于其他任意流体初始速度V0,应考虑V0的影响对坝初始高度进行修正。
基于流体的无粘假设,由流体初始速度V0带来的流体水平方向的位移xV=V0·t,从而可将溃坝模型式(15)修正为

为计入浮体甲板宽度变化对上浪水高度变化的影响,可对前述模型的上浪水高度进行线性修正:

式中,B(x'f)为距甲板前端x'f处的甲板宽度,B0为初始上浪宽度。
初始上浪宽度B0与波浪和浮体首部形状有关。大量的研究表明,对于特定的船型,它与波浪超过干舷的最大高度成正比。因而,初始上浪宽度B0可表达为

式中,CGW为与浮体首部形状有关的系数,对于大部分船型取为0.8~1.l。
3.2 上浪冲击载荷计算方法
本文参考相关规范关于挡浪板局部载荷的经验公式,利用动量定理建立甲板上浪对面板的载荷计算方法。
对于定常流体,动量定理为

假设流体对平板的斜冲击如图15所示。设宽为b0的二元流束以速度V0向平板AB冲击,平板和流速的夹角为α,不计粘性。

图15 平板斜冲击示意图Fig.15 Plate oblique impact
根据动量方程式(19),可以求出

若压力均布,则有

当挡浪板法线在甲板上的投影与舰艇中线面成夹角β时,同理可得出

考虑如图16所示的任意曲板冲击模型,来流速度为V0,曲板两端与来流速度分别成夹角α和β。

图16 屈板斜冲击示意图Fig.16 Bent plate oblique impact
则曲板所受的冲击载荷为

式(23)实际上可以看作是斜板在与来流垂直方向上的投影,因此式(23)曲板所受的冲击载荷可以等效为两端分别与曲板相交斜板的冲击载荷,从而可对设备有限元网格所受载荷进行设计。由于上述计算考虑的是流体无粘性,且不考虑水流动过程中的摩擦现象,与实际情况相比会有一些误差。因此参考相关规范中关于挡浪板及其加强结构计算载荷的经验公式,取修正系数为0.64。
3.3 垂向上浪载荷计算方法
在以往的上浪压力载荷计算中,通常认为甲板上浪压力等于上浪水头的静压力而忽略其动态效应,然而试验测试表明,实测上浪压力明显比上浪高度的静压力高。因而在上浪压力载荷预报时,动态效应是不应忽略的。应用动量定理考虑上浪水头的动力效应后,其压力PGW表达式如下:

式中,ρ为水的密度,ha为甲板上浪水头高度,VD为甲板垂向速度,θ为甲板纵倾角。
3.4 上浪载荷计算
由于本文选取的目标船具有尾部干舷较低及作业海况恶劣的特点,需要对尾部上浪严重区域中的设备(表4)进行安全性能分析,为此需要对艉部设备及相应位置处(图17)的甲板结构进行上浪载荷的计算。

表4 尾部甲板设备信息Tab.4 Tail deck equipment information

图17 甲板上设备分布图Fig.17 Distribution of equipment on the deck
按照船波相对运动计算方法,选取迎浪规则波工况(航速8 kn,波高14 m)中λ/L=0.8的情况作为算例对上浪载荷进行计算。以设备1为例,通过船波相对运动,可以预报得到规则波下设备1所在位置处舷侧位置的上浪高度(或波面与甲板相对高度)变化,如图18所示。以冲击载荷对设备的总弯矩为研究对象,用来确定设备所受载荷最严重的时刻,如图19所示。

图18 舷侧上浪高度变化Fig.18 Height changes on the side of the ship

图19 上浪冲击弯矩分布图Fig.19 Wave impact moment distribution
由此可见,随着设备处上浪流体高度的增加,由此引起的上浪冲击弯矩也不断增加。这种情况就类似于悬臂梁结构。因此,应取上浪流体高度正好为设备高度的时刻。根据上浪载荷计算方法对不同位置进行计算,如表5所示,对波长船长比分别为0.8、0.9、1.0、1.1和1.2进行了计算,取最严重的上浪情况结果。

表5 不同设备处的最大冲击载荷计算结果Tab.5 Calculation results of maximum impact load at different equipments
4 结 语
本文提出了一套基于船波相对运动来计算船舶砰击压力和上浪载荷的理论方法,通过以一艘长艏楼型船为例,开展了砰击压力和上浪载荷模型试验,分别将试验测量的砰击压力和船波相对运动与理论计算方法进行了对比,结果表明理论方法满足工程计算要求。同时本文也分析了基于船波相对运动采用考虑有航速的改进型溃坝模型来模拟上浪流动,并阐述了上浪载荷的计算方法。此外,本文采用一种固定在船上的浪高仪来测量船波相对运动的方法,并且给出了一种通过船波相对运动来计算砰击持续时间的方法。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
中国科技纵横(2022年17期)2022-10-25
船舶标准化工程师(2020年1期)2020-06-12
机械研究与应用(2020年2期)2020-05-21
国防(2017年12期)2017-04-09
北京航空航天大学学报(2016年6期)2016-11-16
船舶标准化工程师(2015年5期)2015-12-03
焊接(2015年9期)2015-07-18
海军医学杂志(2015年2期)2015-02-27
中国舰船研究(2014年6期)2014-05-14
