基于系统保护理念的弹性生态保护空间划定
——以广东省茂名市为例
2021-10-11 07:24张晓琳金晓斌吴心怡梁鑫源周寅康
生态学报 2021年18期
张晓琳,金晓斌,3,*,吴心怡,梁鑫源,韩 博,孙 瑞,周寅康,3
1 南京大学地理与海洋科学学院,南京 210023 2 自然资源部海岸带开发与保护重点实验室,南京 210023 3 江苏省土地开发整理技术工程中心,南京 210023
随着城镇建设用地扩张和人类活动强度增加,全球范围内生物多样性和关键生态系统服务不断减少,加剧了对地球生命系统的威胁[1]。为遏制经济发展对生态环境带来破坏,1987年世界环境与发展委员会在《我们共同的未来》首次提出“可持续发展”概念,强调人与自然和谐共生的新发展路径[2]。2015年,联合国提出17项可持续发展目标,希望到2030年实现经济发展、社会包容、环境协调的全球可持续发展[2]。作为实现可持续发展的重要手段,可持续发展目标中第15项提出“保护恢复和促进可持续利用陆地生态系统”,对生态保护提出更高要求。在实践中,生态保护的落实方式主要是通过建立不同类别的保护区,实施关键区域用途管制。世界自然保护联盟(International Union for Conservation of Nature,IUCN)将保护区定义为“具有相关生态系统服务和文化价值的自然地理空间”[1],按保护等级划分为严格自然保护区/荒野地保护区、国家公园、自然纪念物保护区、生境和物种管理保护区、陆地和海洋景观保护区、资源管理保护区6类[3]。自1956年建立第一个国家级自然保护区以来,我国逐渐形成以自然保护地体系和生态保护红线为主的生态保护空间管控格局[4]。其中以国家公园为主体的自然保护地体系强调重要自然生态系统保护和生态产品供给能力提升,进一步划分为国家公园、自然保护区、自然公园3种类型[5]。以生态功能极重要区和生态环境极敏感区为保护对象的生态保护红线,表征生态保护最小面积和生态安全的底线,体现了生态保护的刚性约束要求[6]。随着山水林田湖草生命共同体理念提出,近年来国家发布了《省级国土空间规划编制指南》(试行)、《山水林田湖草生态保护修复工程指南》(试行)、《全国重要生态系统保护和修复重大工程总体规划(2021—2035年)》等重要文件,旨在提升自然生态系统与农田、城市人工生态系统之间的协同性,构建山水林田湖草一体化保护修复格局。立足可持续发展战略框架和国家战略需求,广义的生态保护不应只关注自然生态空间的保护,还应关注农业和城镇空间中半自然生境的生态保护,以维持区域整体生态系统健康发展[7]。基于此,总结国内外生态保护存在的问题:①在生态保护对象上,由于不同保护体系概念内涵和管理目标差异,保护对象和范围尚未形成统一标准,造成保护区空间重叠、多头管理等问题[5];②在生态保护目标上,较多侧重生物多样性保护目标下自然生境保护,对可持续发展目标下的生态系统服务的保护关注较少;③在生态保护内涵上,均侧重基于现状的生态问题治理和保护,对未来生态保护的弹性空间考虑较少;④在生态保护方式上,保护等级主要呈现刚性约束现象,缺少半自然生境的保护和管理[6,8]。厘清生态保护内在要求,明晰弹性生态保护空间概念定义和划定过程,对协调各类保护区建设冲突,实现区域可持续发展具有重要意义。
立足生态保护内涵要求,采取有效分析方法划定生态保护空间具有重要实践指导意义。常见保护区划定方法包括综合指标评价法[9]、形态学空间格局分析(MSPA)[10-11]、系统保护规划(如MARXAN模型)[12-14]等。综合指标评价法多通过选取表征生态保护要求的评价指标,采用空间加权叠加评价指标方式划定保护区。其中在评价指标选取方面,学者侧重从水源涵养、土壤保持、生物多样性维护等生态功能进行评价[15],而以农田等半自然生境的粮食供给功能评价较少纳入分析体系[16-17]。在空间叠加划定方面,有学者将单项功能前25%区域取交集作为生态保护空间[18],也有学者将评价结果的前20%区域作为重要生态源地[12]。该方法为保护区划定提供了简便路径,但评价指标选择和指标权重计算多样,忽略了斑块在空间结构中重要性及其与周围环境间的关系[19]。MSPA分析法是基于数学形态学原理测度结构连接性的方法,可与指标评价方法相结合划定保护区[10-11]。受社会经济因素影响,保护区通常建立在机会成本较低的地方[20-21],仅考虑结构连接性的MSPA分析法略显不足。系统保护规划是Margules和Pressey在2000年提出的针对生物多样性保护的方法,目前以MARXAN模型应用最为广泛,该模型综合考虑保护区的面积大小、边界长度、连通性以及社会经济成本等因素,通过模拟退火算法迭代运算得到区域最佳保护空间,实现以最少成本达到最有效保护的目的[12-14]。现有MARXAN模型多基于目标物种分布开展保护区选址研究[22-24],然而物种分类复杂多样,相关物种分布范围存在较大不确定性,基于目标物种空间分布研究保护区划定面临诸多局限。利用改进传统MARXAN模型开展生态保护空间划定,可弥补传统评价方法的缺陷,相关研究亟需实践。
沿海地区生态要素复杂多样,是生态保护关键区域[25]。茂名市位于粤港澳大湾区、北部湾城市群和海南自贸区三大国家级经济区的交会处,区域资源类型丰富多样,拥有“山水林田湖草海”等多种生态要素,生态保护与农业生产之间矛盾突出。利用传统生态保护红线划定方法可能导致红线划定范围偏大,保护区内部存在大量的基本农田冲突问题[6]。如何协调基本农田保护区、生态保护红线以及其他保护区冲突,处理好刚性约束与弹性管控之间关系,亟需建立规范、统一的生态保护空间。基于此,本文以沿海地区特色发展区——广东省茂名市为例,通过系统解析生态保护空间内在特征,构建弹性生态保护空间指标评价体系,利用改进的MARXAN模型开展多种约束条件下的弹性生态保护空间划定,以期为国土空间山水林田湖草系统保护提供参考。
1 生态保护空间的弹性思维
为减少栖息地丧失和生物多样性下降,由联合国环境规划署发起的《生物多样性公约》提出,到2020年全球至少保护17%的陆地区域[26]。欧盟委员会制定了生物多样性保护战略,计划到2030年保护其30%的陆地和海洋生物多样性。虽然IUCN将具有重要生态系统服务和文化价值的自然地理空间划定为保护区,但实际生态保护过多关注生物多样性保护,忽略重要生态系统服务[1]。基于国家公园和生态保护红线制度,我国的生态保护主要基于不同生态系统类型,对重要生态功能、生态敏感和脆弱区域加以保护。以生态系统自身特性为保护对象的生态保护方式,侧重完全自然空间生态系统保护,构成了“狭义生态保护空间”。随着山水林田湖草生命共同体理念提出,系统保护理念研究愈加重要。区别于各类重点保护区和绿地系统网络[27-28]等生态保护方式,系统保护理念可定义为通过生态系统内部多要素保护以及生态系统服务提升,维护生态系统结构的完整性和其功能的可持续性,以期实现区域可持续发展的生态保护理念,反映了山水林田湖草各生态系统之间的系统性和有机联系。在结构完整性上,系统保护理念以完整生态系统为基本保护单元,以自然要素区域为保护范围;在功能可持续性上,系统保护理念强调物种多样性保护,维持生态系统各项功能。系统保护理念的整体性与功能性是内部结构与外部系统环境综合作用的结果,体现了山水林田湖草生命共同体理念。基于系统保护理念的生态保护,兼顾了农业生产空间、城镇生态空间等半自然生境保护,成为“广义生态保护空间”的重要组成部分。正确认识狭义、广义生态保护空间在国土空间规划中表现方式及所发挥作用,对生态系统有效保护具有重要实践意义。
从管控强度上看,广义生态保护空间具有刚性约束和弹性管控特性。广义生态保护空间包括了基于现状评价的生态功能重要区、生态敏感区、生物多样性重点保护区等狭义生态保护空间,通过建立生态红线或各类自然保护区制度,对关键的自然生态空间进行严格保护,具有刚性约束特点。另一方面,广义生态保护空间也具有一定“弹性”。在微观尺度,生态系统具有一定弹性,表现在偏离平衡状态后恢复到原始状态的自我调节能力[29]。在宏观尺度,基于多目标规划优化土地资源配置的弹性规划,为未来的可持续发展预留足够空间,是实现资源管理可持续性重要手段[30]。区别于刚性生态保护空间,弹性生态保护空间具有四个基本特征:①空间范围上,刚性生态保护空间针对自然生境的保护,弹性生态保护空间具有更广空间范围,包括半自然生境的保护范畴;②时间维度上,刚性生态保护空间基于现状区域生态问题进行保护治理,弹性生态保护空间针对未来发展前景,对现有广义生态保护空间进行规划管控;③管控强度上,刚性生态保护空间具有排斥人类活动的严格保护特性,弹性生态保护空间针对不同生态系统类型采取多样化管控路径,既有针对生态重要区的严格保护,也有针对半自然生境生态建设,通过高自然价值农田、绿色基础设施网络建设,保持生态系统完整性以及提升生态系统服务。关于刚性、弹性生态保护空间的概念辨析,详见表1。
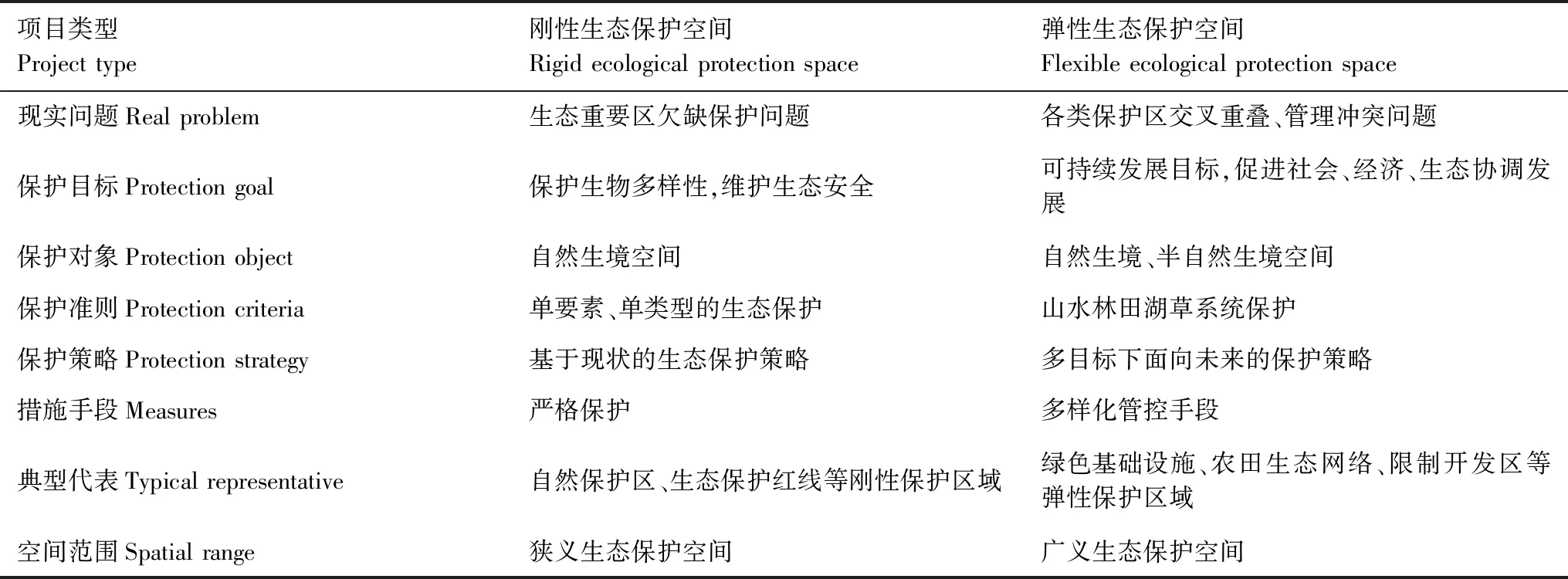
表1 刚性与弹性生态保护空间概念辨析Table 1 Discrimination on the concept of rigid and flexible ecological protection space
联合国千年生态系统评估是在可持续发展战略框架下,通过综合评价生态系统服务,分析世界资源利用、发展趋势等情况[31]。借鉴千年生态系统评估框架,弹性生态保护空间至少具备:①功能属性上,弹性生态保护空间是国土空间中生态系统服务的高值集聚区域;②空间属性上,弹性生态保护空间应维护不同保护区间连通性,即具备满足较高的生态系统弹性恢复力和生态连通性等其他空间属性要求[32-33];③效用属性上,在实践操作上弹性生态保护空间应具有较高保护效用,尽可能提升生态保护价值,降低保护成本,为生态保护和社会经济发展提供生态支撑。基于此,弹性生态保护空间是以自然或半自然属性为基础,以功能属性为依据,以空间属性为优化,以效用属性为辅助的国土空间,以实现多因素综合考虑下的保护区最优选址目的。系统保护规划是一种选址优化算法,从保护成本与保护目标两方面出发,对研究区域内有限的保护资源进行优化配置,达到多目标集成、多条件限制下保护区最佳选址目的[12-14]。基于弹性生态保护空间特性,耦合系统保护规划的弹性生态保护空间应满足以功能属性为评价对象和准则,以自然或半自然属性为基本限制条件,以效用属性为最终保护目标,达到空间属性优化目的(图1)。
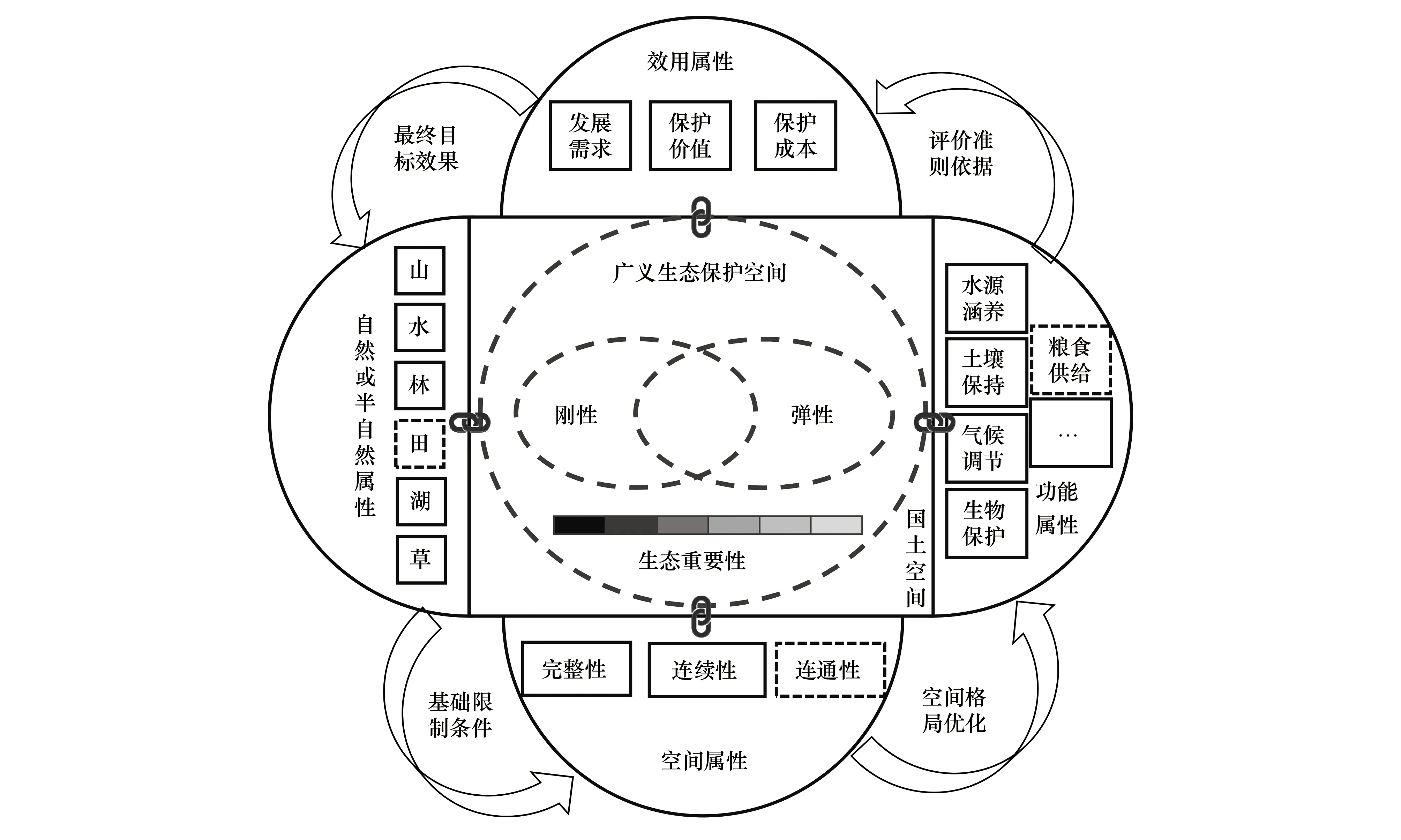
图1 系统保护规划下的弹性生态保护空间理论解析图Fig.1 The theoretical analysis diagram of flexible ecological protection space under system conservation planning
2 研究区与研究方法
2.1 研究区概况与数据来源
2.1.1研究区概况
茂名市位于广东省西南部,东经110°20′—114°40′,北纬21°25′—22°43′之间,东与阳江市毗邻,西与湛江市接壤,北连云浮市和广西壮族自治区,南邻南海。茂名市辖信宜市、高州市、化州市、茂南区和电白区,陆域面积为11458 km2,其中农用地4429.62 km2、建设用地1288.2 km2、林草地4839.71 km2、水域694.87 km2(图2)。全市资源丰富类型多样,拥有“山水林田湖草海”等多种生态要素,农业资源和水资源丰富,是粤西地区重要水源涵养区和广东省重要农业生产基地。全市产业发展特色明显,是全国重要的石油化工基地和能源基地。根据2018年茂名市国民经济和社会发展统计公报,茂名市人均地区生产总值49406元,三次产业结构为16∶38.1∶45.9,高质量发展态势逐步显现。总结茂名市经济发展与资源保护利用问题:一方面面临生态要素丰富但整体质量不高,生态保护压力逐年增大等现实问题;另一方面存在生态保护红线划定范围偏大,与基本农田控制线权衡管理问题[6]。

图2 研究区区位与土地利用现状(2018)Fig.2 Location of the study area and land use status (2018)
2.1.2数据来源与处理
本文的基础数据包括土地利用数据、遥感影像数据、基础设施数据等,所有数据均统一行政区边界与坐标投影(2018年,高斯-克吕格投影,1980年西安坐标系),详见表2。基础数据预处理包括以下方面:(1)为统一精度,将土地利用矢量数据转换为30 m分辨率栅格数据。(2)为获取与研究精度相一致的NDVI数据,选取夏季少云的Landsat 8 OLI影像(2018年),利用ENVI 5.1软件对影像进行大气校正、几何校正、图像拼接等操作,提取相应波段得到NDVI数据。(3)将土地利用数据与POI点数据进行空间关联并转换成30 m×30 m的栅格,代表基础设施点密度数据。(4)从土地利用变更数据库提取铁路、公路、农村道路等作为研究区道路图层。

表2 数据来源及说明Table 2 Data sources and description
2.2 研究方法与改进
2.2.1MARXAN模型
MARXAN模型最初由昆士兰大学的Watts.Matt研发,是基于模拟退火算法的多目标系统保护规划软件,可在一定保护成本限制下实现最有效保护目标[12-14]。模型最早应用于海洋保护体系规划,随着方法不断完善,近年来广泛应用于陆地保护体系规划,其核心是通过目标物种分布情况确定保护区选址,达到生物多样性保护目的[22-24]。MARXAN模型运算基本函数如下[12]:
Sc=∑Cost+∑SPF×Penalty+BLM∑Boundary
(1)
式中,Sc为总保护成本;Cost为单个栅格保护成本;SPF为单个栅格没有得到保护目标的惩罚;Penalty为惩罚系数;Boundary为边界长度调节因子,用以平衡边界长度和成本支出,从而得到建设成本低且边界长度短的解决方案。BLM值越小,边界长度越短,代表保护区域形状愈加紧凑和完整,有利于生态斑块间内部连通,同时提高了管理和保护效率。参考研究[34],将总规划成本和运算结果中总惩罚值进行敏感性分析,进一步确定合适的SPF值;将边界长度和总规划成本进行敏感分析,从而确定最佳BLM值。
在模型运行过程中,研究区首先被划分为一定数量的规划单元,每一规划单元包含不同保护对象的特定面积和栅格保护成本值[35]。既往研究的规划单元划分主要为三种类型:网格单元[36]、六边形[37]、自然生态分区(如水文集水区)[38]。规则的规划单元形状便于运算,但容易割裂生态连接性[34]。因此研究利用DEM数据生成集水区,将水文集水区作为规划单元。不同规划单元可设定特定初始状态,具体为“初始时可能保留参考”、“初始时一定保留参考”、“一定锁定结果”、“一定剔除结果”4种状态,分别用数字0、1、2、3进行设置。当设定保护对象的目标后,模型会随机选择一定数量规划单元,通过不断迭代运算最终得到满足保护目标,成本最低、数量最少的规划单元。以规划单元视角,设规划单元总数为m,保护对象类别总数为n,则有:
(2)
式中,i=1,…,m;j=1,…,n;aij表示保护对象j是否包含在规划单元i。
(3)
式中,i=1,…,m;xi表示规划单元是否被选入保护体系。
(4)
式中,tj代表保护对象j的目标百分比,即保护对象目标值。保护目标设置太高将难以达到目标值而惩罚值过高,设置太低将失去保护意义[34]。结合以往研究[34,36],保护目标值设定为20%—50%可以达到较好保护区划定效果。根据《茂名市国家森林城市建设总体规划(2017—2030年)》,到2023年茂名市顺利荣获并通过“国家森林城市”称号复查。其中国家森林城市建设标准为年降水量800 mm以上的地区城市森林覆盖率达到35%以上,城区绿化覆盖率达到40%以上。基于茂名市自然环境特点,综合设定保护对象目标为30%。
2.2.2模型方法改进
(1)保护对象模块改进
基于弹性生态保护空间特性,以生态系统服务为系统保护规划对象。依据广东省主体功能区规划(2010—2020年)、粤西地区环境保护规划(2011—2020年),综合确定研究区重要生态系统服务。气候调节功能、生物保护功能、水源涵养功能、土壤保持功能利用InVEST模型[39]的固碳量、生境质量、产水量、土壤保持模块进行计估算;粮食供给功能基于分县区的粮食产量统计数据利用NDVI修正耕地栅格数据,通过空间分配方式将粮食产量落到栅格单元[6]。进一步确定系统保护对象空间分布,需要对生态系统服务评价结果进行二值化处理。具体地,对各项生态系统服务评价结果进行0—1标准化处理,将功能值大于平均值的区域作为保护对象潜在分布范围。
(2)保护成本模块改进
受各种限制因素制约,直接计算保护经济成本非常困难[34]。由于保护成本主要受人为活动影响[40-41],人类活动越密集的地方保护成本越高[36],本文将生态阻力面作为保护成本进行分析。将土地利用数据按不同类型赋以不同土地利用阻力值,利用研究区道路数据、基础设施点密度、DEM数据、NDVI数据等共同修正土地利用阻力值,得到最终生态阻力面[28]。
(3)保护方案模型优化
按照规划单元初始状态不同,设置情景模拟进行不同保护方案优化对比分析,采用锁定生态保护红线核心区、剔除建设用地以及不采取任何锁定、剔除操作2种模拟方式。第一种情景下可保证红线内部核心区一定保留在模拟结果内,同时剔除建设用地选择可能性;第二种情景主要依据保护成本和功能评价结果进行选择,没有初始状态的限制。
3 结果分析
3.1 重要生态系统服务评价结果
根据各项功能评价结果,采用极差标准化方法对各功能值进行标准化处理,以消除度量单位的影响。将各项功能标准化结果进行叠加运算,得到综合生态系统服务。从各项生态系统服务评价结果来看,茂名市气候调节功能、生物保护功能、水源涵养功能高值主要分布在北部山区,集中在北面的云开大山、东北面的大云雾山脉和西北面的勾漏山脉附近(图3)。土壤保持功能高值主要分布在东北部山区,说明西北部植被覆盖度和土壤保持功能低于东北部。粮食供给功能高值主要分布在中南部区域,说明城市郊区内部的基本农田和耕地在粮食供给方面发挥重要作用。从综合生态系统服务评价结果来看,高值区主要分布在北部山区,低值区主要集中在城镇建设内部及其周边区域,整体上综合生态系统服务的空间分布与单项生态系统服务评价结果趋势相似。综合生态系统服务低值区一定程度上代表人类活动强度较大区域,同时该区域生态保护价值较低且保护成本较高。
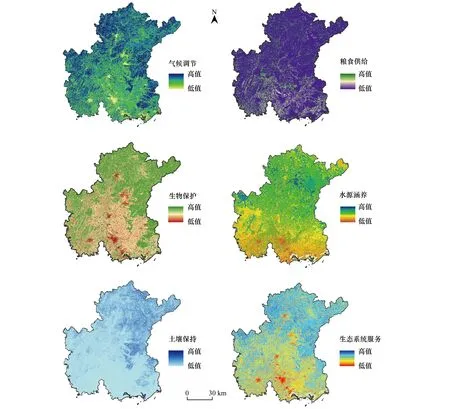
图3 重要生态系统服务评价结果Fig.3 Evaluation results of important ecosystem services
3.2 弹性生态保护空间划定结果
(1)不考虑初始状态的情景模拟
不考虑生态保护红线、建设用地等限制条件下,规划单元的初始状态均设置为“0”。通过总规划成本和总惩罚值的敏感性分析,得到适宜的SPF值为1.05。通过不同边界长度和总规划成本的敏感分析,得到最佳BLM值为32。基于单项生态系统服务评价结果和保护成本数据,进行MARXAN模型迭代运算,得到该情景下模拟最终结果。其中绿色区域为该情景下系统保护最佳结果,红色区域为现状生态保护红线。为分析不同方法的优劣,将综合指标评价分级法作为传统分析方法,取综合生态系统服务前30%的区域作为传统方法划定结果。
从图4可以看出,情景模拟1的结果与传统方法划定结果空间分布趋势一致,说明改进MARXAN模型在识别生态保护空间方面的适用性。与传统结果不同,系统保护结果空间分布更加集聚和完整,而传统结果空间分布零散,易受人为因素的干扰。通过生态保护红线与系统保护结果的叠加分析,两者空间分布差异明显,不重叠部分主要分布在西北部山区。这主要因为两者评价内容和目标不同,生态保护红线划定依据生态极重要和生态极敏感评价结果,系统保护规划结果依据各项重要生态系统服务评价,同时受各项生态系统服务保护目标的约束。结果在一定程度上说明西北部区域生态重要程度虽较低,但在区域生态系统服务供给方面起着重要作用。
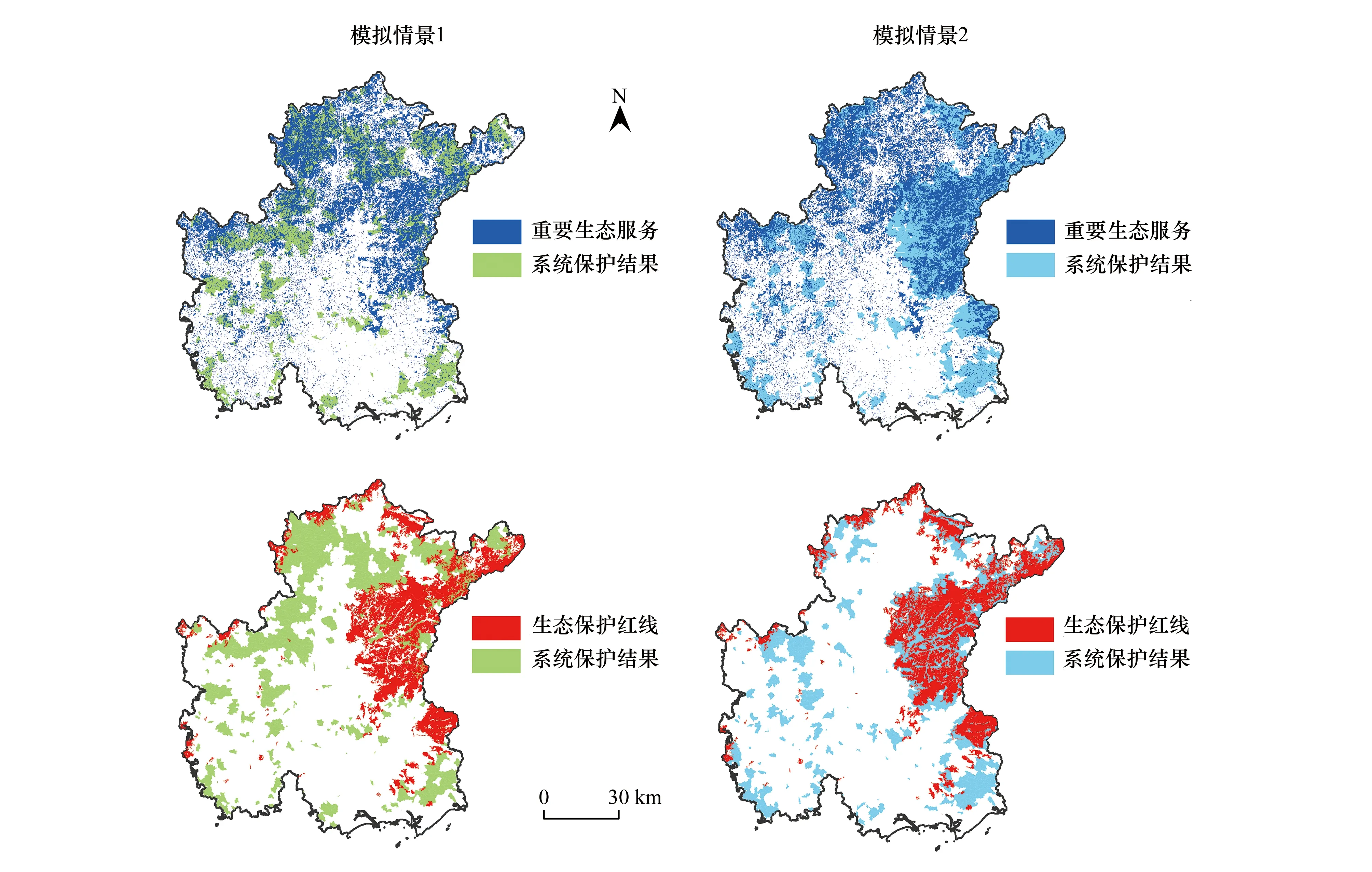
图4 生态保护空间模拟结果Fig.4 Simulation results of ecological protection space
(2)考虑初始限制状态的情景模拟
考虑生态保护红线、建设用地等限制条件下,将生态保护红线核心区内的规划单元设置为“2”,建设用地内的规划单元状态设置为“3”,其余规划单元的初始状态设置为“0”。通过敏感性分析,得到适宜的SPF值为0.65,最佳BLM值为32。该情景模拟的最终结果详见图4,其中浅蓝色区域为该情景下系统保护最佳结果,其他区域释义可参照情景模拟1的分析。
受生态保护红线等限制条件影响,情景模拟2的结果与传统方法划定结果在空间分布上存在差异,主要集中在西北部、北部区域。与传统结果相比,系统保护结果分布更加集聚和完整,更贴合生态保护红线空间分布,易于后期管理和维护。系统保护规划结果与生态保护红线空间分布趋势相似,且系统保护范围大于生态保护红线,超过的部分主要分布在中西部台地平原区,表明这些区域在未来国土空间规划中需加强保护。
(3)两种模拟结果对比分析
经模型迭代运算,情景模拟1所得系统保护规划面积为2770.9 km2,占区域总面积24.26%;情景模拟2系统保护规划面积为3474.56 km2,占区域总面积30.41%。一方面,情景模拟2比模拟1考虑限制性因素更多,与生态保护红线重叠面积更大,更符合现实管控需求;另一方面情景模拟2结果比模拟1结果受保护范围更大,所付出保护成本更高(表3)。

表3 模拟结果对比分析Table 3 Comparative analysis of simulation results
4 讨论
4.1 弹性生态保护空间划定的合理性
为验证生态保护空间划定的合理性,将生态保护红线核心区作为限制条件,选择情景2的系统保护规划结果与茂名市陆域生态保护红线进行对比。2018年茂名市陆域生态保护红线面积为1803.94 km2,系统保护结果面积为3474.56 km2,两者相交部分面积为1505.02 km2,占生态保护红线面积的83.43%,表明系统规划结果涵盖了大部分生态红线区域。两者的空间分布趋势相似,相交部分主要集中在东北部山区(图5)。
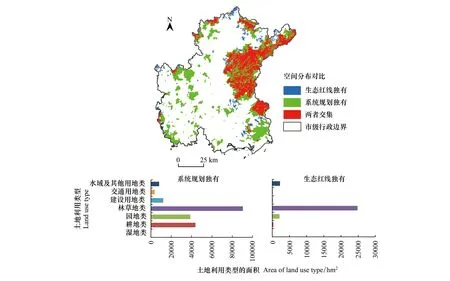
图5 系统保护结果与生态红线对比分析Fig.5 Comparative analysis of systematic conservation planning results and ecological red line
对两者不重叠部分进行土地利用类型分析,系统规划独有的区域面积为1969.54 km2,其中林草地类、园地类、耕地类占比最高,分别为45.92%、19.71%、22.24%;生态保护红线独有的区域面积为298.91 km2,其中林草地类面积占比为83%,水域及其他用地类面积占比为7.56%,园地类面积占比为7.06%。生态保护红线独有的区域分布在生态红线外围,该区域受人类活动干扰程度较大,生态系统功能不稳定。参考相关研究[42-43],利用景观格局指数中边缘密度、平均斑块面积、欧式平均最邻近距离、结合度指数、聚集指数分析两者空间分布的差异性。从表4看出,系统规划独有的区域更加集聚连片,在空间布局上更具合理性。综上,研究选址结果具有相对合理性。

表4 空间布局对比分析Table 4 Comparative analysis of spatial layout
4.2 弹性生态保护空间与各类保护区衔接
区别于刚性生态保护空间的强管控约束,弹性生态保护空间是以功能属性为依据的广义生态保护空间,对实现区域可持续发展发挥重要作用。生态保护红线是生态保护最小面积和生态安全的底线[6],基本农田是保障粮食安全的底线和约束条件,各类自然公园和保护区是生态保护重要组成部分,协调各类保护区间关联作用,开展弹性生态保护空间系统性建设具有重要研究意义。在划定弹性生态保护空间过程中,将生态保护红线等法定保护区域作为限制条件,研究结果更具有实践操作性。基于系统保护规划的生态保护空间划定,为解决保护区规划冲突、保护空缺、生态连通性差问题,加强国土空间规划生态空间用途管制提供新路径。采取具体策略:(1)对于系统保护规划内生态红线核心区应加强保护,强调自然培育和恢复,严禁人类开发建设活动,维持生态系统安全。(2)对于系统保护规划内一般保护区可开展一定程度保护和建设活动,强调“基于自然的解决方案”的生态保护修复,增强不同要素间生态连通性的同时,拓展和提升各类生态系统服务。(3)对系统保护规划内基本农田或耕地开展生态农业建设,提升耕作便利条件和粮食产量的同时,实现农田可持续利用。此外,建立生态系统综合管理的政策保障机制,统筹山水林田湖草系统性保护与利用,协调不同要素间保护冲突,促进生态系统服务有效恢复和提升。
4.3 研究不足与展望
本文利用改进的MARXAN模型划定生态保护空间具有借鉴价值,但在规划结果应用、计算过程分析方面仍需进一步完善。受基础数据的限制,研究将生态阻力面作为保护成本具有一定可取性,但保护成本与生态阻力面关系仍需进一步分析,后续将区分不同阻力类型对保护成本影响进一步修正生态阻力值。研究利用InVEST生境质量模块评价结果作为生物保护功能,强调生境质量对生物保护重要程度,但未从各类物种角度出发分析其空间分布范围和强度。此外,在模型运算中保护对象目标值均设定为30%,后续仍需根据研究区实际情况和未来规划进行适当调整,进一步区分不同生态系统服务类型对保护目标影响。研究通过单项功能二值化处理得到保护对象空间分布,后续将借鉴突变点检测理论完善相应计算方法,精准识别重要生态系统服务空间分布。借鉴生态系统“格局-过程-功能”研究,明确格局与功能互馈关系,以及生态系统演变过程,进一步指导弹性生态保护空间划定。
5 结论
本文基于可持续发展目标下的生态保护内在要求,对生态保护空间中刚性和弹性管控模式进行区分,以沿海地区茂名市为研究区,从生态系统服务角度出发,采用改进的MARXAN模型划定生态保护空间,并结合传统划定结果和生态保护红线数据进行了研究方法和结果有效性验证,拓展了MARXAN模型的应用范围,为解决不同生态要素间规划冲突问题以及未来国土空间用途管制提供指导。研究结果表明:(1)茂名市重要生态系统服务呈北高南低态势,空间分布不均衡。综合生态系统服务与单项生态系统服务评价结果在空间分布上趋势相近,其中高值区主要分布在北部山区,低值区主要集中在南部城镇建设内部及周边区域。(2)与传统划定方法相比,考虑多种限制条件的系统保护结果在空间分布上更集聚,更符合现实管理需求。系统保护结果与生态保护红线重叠面积1505.02 km2,占生态保护红线面积的83.43%,不重叠区域主要由林草地类、园地类、耕地类组成,占比分别为45.92%、19.71%、22.24%,研究结果具有合理性。(3)在未来生态保护建设中,应针对系统保护规划内不同区域采取多样化整治策略。针对系统保护规划内生态红线核心区域采取加强保护管理策略,对系统保护规划内一般保护区采取生态系统服务功能系统提升策略,对系统保护规划内耕地采取生态农业建设策略,达到山水林田湖草系统保护目的。
猜你喜欢
房地产导刊(2022年10期)2022-10-18
英语世界(2022年9期)2022-10-18
军事文摘(2021年18期)2021-12-02
品牌研究(2021年7期)2021-11-28
军事文摘·科学少年(2021年9期)2021-10-13
家庭影院技术(2020年2期)2020-03-25
建材发展导向(2019年11期)2019-08-24
模具制造(2019年4期)2019-06-24
意林·全彩Color(2018年9期)2018-10-12
现代园艺(2018年2期)2018-03-15