
企业专利质量优劣评价的犹豫模糊平衡参考解方法
2021-10-09 05:03彭定洪陈文妮曾洪鑫
科技管理研究 2021年17期
彭定洪,陈文妮,曾洪鑫
(1. 昆明理工大学管理与经济学院;2. 昆明理工大学质量发展研究院,云南昆明 650093;3.东莞理工学院经济与管理学院,广东东莞 523808)
创新是引领发展的第一动力,创新驱动发展战略是推动经济发展质量、效率和动力变革的关键[1]。企业是我国社会主义市场经济的主体,也是创新的主体,创新驱动的实施需要企业来推动[2]。专利是企业创新能力和成果的集中体现,专利质量的高低是企业科技创新产出准确、客观的度量标准之一,在促进企业的经济增长与技术进步中有显著作用[3]。自中国正式颁布《专利法》以来,企业专利的申请量和授权量就呈现爆炸式的增长态势,垃圾专利、问题专利、专利怪客等现象也层出不穷,企业专利质量情况不容乐观,且多数专利只是在原有技术基础上进行微小改进,仅少部分有较大创新或蕴藏巨大的经济价值[3],这引起社会各界对专利质量问题的高度关注[4]。分析创新驱动发展下影响企业专利质量水平高低的因素成为亟需研究的内容[5]。纵观研究,多数学者结合相关数学模型对企业专利质量进行了评价。例如,万小丽等[6]将模糊综合评判法引入中国企业专利质量评价中,对模糊的、不确定的专利价值进行量化处理,最终计算出评估对象的综合评定结果;张军荣[7]以专利维持作为专利质量的代理变量,运用虚拟回归的方法对高校专利质量进行了分析等;冯君等[8]、张耀天等[9]等运用定性与定量分析相结合的层次分析法对专利质量进行了评价;陈伟等[10]结合DEA 与TOPSIS 方法分析了30 个省份的高新技术产业专利质量以及知识产权运行效率;陈伟等[11]基于熵值法与TOPSIS 法对高技术产业知识产权保护能力进行了评价分析;谢萍等[12]针对国内外核心专利研究现状,基于技术领域与时域,利用TOPSIS 法对专利质量进行了研究。尽管以上研究大都以基数式或序数式排名显示专利质量的优劣评价结果,一定程度上对专利质量评估做出了贡献,但是现实中我们的认知习惯往往期盼能够了解评价对象(也包括创新驱动下企业专利质量)各类因素的具体优劣情况,上述方法似乎不能达到这一意图。因此,本文在创新驱动发展战略背景下,对影响企业专利质量的各类因素进行综合评价并分析获取具体优劣情况,为企业专利质量管理提供参考。
欲对创新驱动下企业专利质量的进行全面、客观和有效的评价,需要来自相关领域的专家群体协同参与[13]。从评价方法看,该问题实属一个多群组专家参与的综合评价问题。此类问题的关键和难点是如何合理地解决各群组中个体意见的分歧从而整体地表征群组意[14]。针对该情形,2010 年西班牙学者Torra 等[14]提出的犹豫模糊集(Hesitant Fuzzy set,HFS),HFS 通过一组数目不定且无序的取值特征隶属函数正好应对着群体中个体意见分歧难达共识的问题。至今HFS 现已普遍用于解决多群组中个体意见的分歧[15],并且获得了良好的效果。依据现有应用研究,本文尝试将犹豫模糊集理论运用于创新驱动下企业专利质量评价中以科学合理地表征各群组中个体意见。
参考依赖是人类评价、分析的普遍模式。在综合评价方法理论中,将该模式具体化的当属TOPSIS(Technique for Order Preference by Similarity to an Ideal Solution,逼近于理想解排序)方法[16],该方法根据被评对象与理想化和负理想化目标之间的距离进行排序,从而实现对现有对象相对优劣的评价,已成为当今最常用的方法之一。最近,考虑到人们热衷于以平均水平为基准列出优势项和劣势项的习惯,Keshavarz 等[17]于2015 年提出了EDAS(Distance from Average Solution,依赖平均距离)方法,该方法通过计算各被评对象指标与平均水平的正向距离与负向距离,确立被评对象的综合优劣势度,进而获取各评价对象的优劣情况。该方法能够有效消除专家组对被评对象指标评价的偏差风险[17],并能够获取各指标相对于平均水平的优劣程度。以上两种方法因自身的优越性在许多领域得到了广泛应用,例如创新能力评价、专利情报质量评价以及竞争情报评价等。但在实际应用中,TOPSIS 法中的正负理想解往往是无法达到的,且基数式或序数式的评价结果排名并不能得到被评对象具体的优劣情况[15]。因此,本文计划融合TOPSIS 法的依赖极值参考解思想和EDAS 法的依赖均值参考解思想,以列出被评对象优势项和劣势项为目的,从TOPSIS 方法的正距离矩阵和负距离矩阵中获取被评对象每个指标的最优距离分量和最劣距离分量,并将其融合为平均距离分量以了解被评对象指标在最优和最劣状态下的平衡水平,再通过计算以平衡水平为基准的指标综合优劣势度来分析其优劣或好坏。
无论是TOPSIS 法还是EDAS 法,均需衡量评价对象和基准理想解之间的差异。而距离测度是衡量差异的主要方式之一,且在创新驱动背景下,企业专利质量各指标的差异性信息广泛存在[18],为此,通过各类距离测度对比,本文引入能够衡量不同样数据样本差异的Bray-Curtis 测度[19],将其与HFS结合,并用于度量被评对象之间的距离,通过实际计算表明该距离测度能够有效衡量具有不同样数据样本的差异性。
综上,基于犹豫模糊Bray-Curtis 距离测度,本文构建了集成TOPSIS 法的依赖极值参考解思想和EDAS 法的依赖均值参考解思想的以指标优劣水平为性能度量的多指标多群决策模型,并将其应用到创新驱动发展下高技术企业专利质量评价的多指标群组决策中,验证了该决策方法的可行性和实用性,并对比其他方法,该决策方法在评价精度方面具有更加优异的表现,对于当下创新驱动发展战略下企业专利质量的提高具有重要的参考意义。
1 预备知识
1.1 HFS 的相关知识及犹豫模糊Bray-Curtis 距离测度
在创新驱动发展环境下,由于某些数据分散、残缺、动态性高以及结构复杂等问题,导致其质量评价标准存在模糊性以及无法兼顾各群组的意见等问题。为解决以上问题,本文采用HFS 这一工具来处理不确定信息,此工具不仅可以充分反映和兼顾各群组的不同意见,还可以充分利用决策信息体现决策者偏好[15]。以下给出HFS 的定义及计算法则:


为了对评价信息进行有效处理,距离测度近年来被有效应用于多指标评价方法中。目前,在评价方法中应用较多的是Euclidean 距离、Hamming 距离以及Hausdorff 距离,然而,这些距离存在以下缺点:(1)对离群值敏感[19];(2)不能兼顾分量间的差异[20];(3)稳定性差[19],因此,不适用于常存在离群值和指标之间具有差异性的专利质量评价。在信息测度领域中,Bray-Curtis 距离能够很好的克服上述缺陷,且该距离测度具有标准化的特性,能够使各指标在同一量纲进行测度,因此免去了标准化这一步骤,使得信息得到充分利用且不受损失。基于此,本文根据Torra 等[14]的拓展原理以及Peng 等[21]的距离构造思想将Bray-Curtis 距离拓展到犹豫模糊背景,形成一种新的犹豫模糊距离测度,具体定义如下:

为证明其有效性,下面我们给出一个例子进行说明。
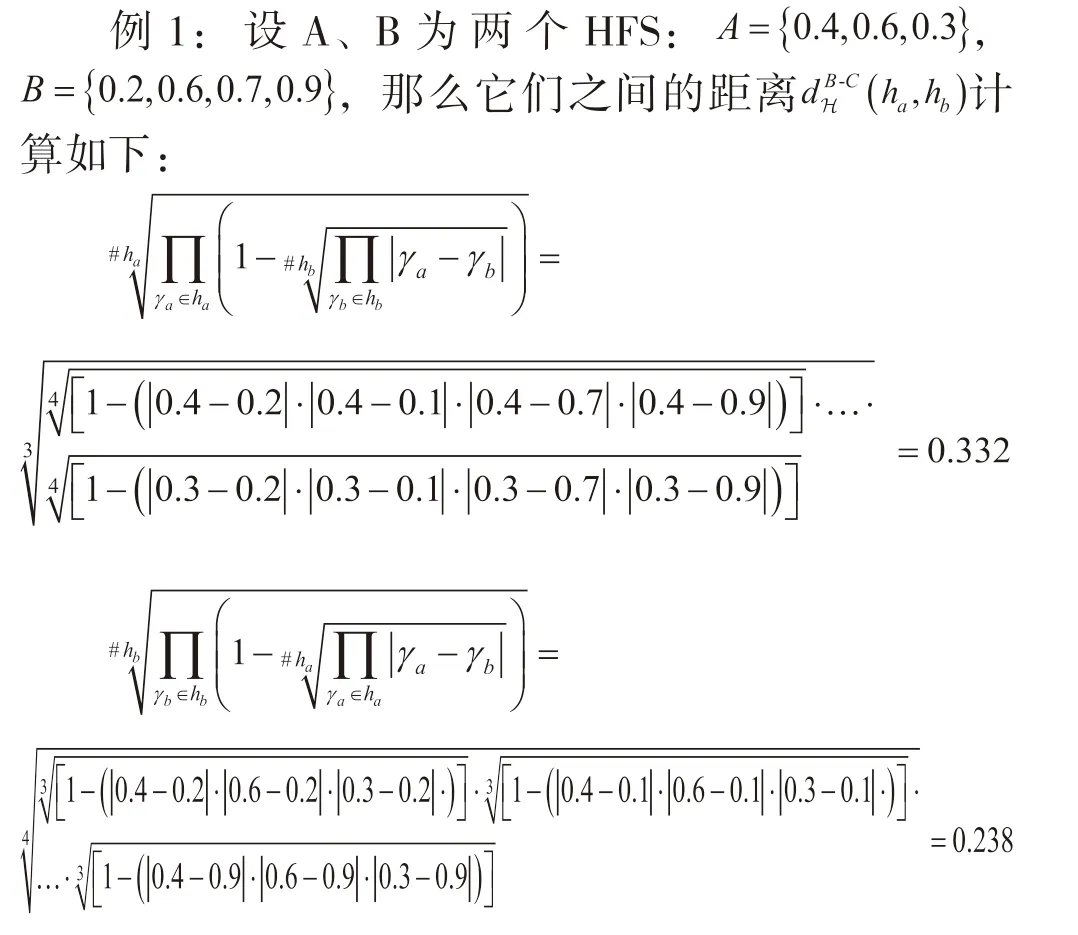
按类似计算方式,可得出其余计算结果,如下:

1.2 以指标优劣水平为性能度量的平衡参考解
评价和分析创新驱动发展下企业专利质量指标优劣性是改善或提高企业创新能力的手段之一。在实际评价中,我们的认知习惯往往期盼能够了解评价对象(也包括专利质量)各指标的具体优劣情况。为对企业专利质量指标优劣性进行科学合理地评价,本文在犹豫模糊环境下,以获取被评对象优势项和劣势项为出发点,融合TOPSIS 法的依赖极值参考解思想和EDAS 法的依赖均值参考解思想,从依赖极值参考解的距离矩阵中分别获取评价对象各指标的最优和最劣距离分量,并将其融合为平均距离分量以了解评价对象各指标在极值状态下的平衡水平,再通过计算以平衡水平为参考解的指标综合优势度来分析被评对象各指标的优劣性,其流程见图1。

图1 企业专利质量评价的平衡参考解流程图
2 以指标优劣水平为性能度量的平衡参考解模型构建
2.1 问题描述
考虑含有犹豫模糊信息的多指标评价问题,具体描述如下:
2.2 模型构建
步骤2:考虑到创新驱动发展下企业专利质量评价指标对整体影响的程度不一,因此需要从评价的实际情况来设置指标权重。在现有的研究中,对于指标权重和专家组权重的配置,通常采用的是AHP 法、熵权法以及最大离差法等,而其中应用最为广泛的是熵权法[22],熵权法根据各评价指标所包含信息的差异性(信息的效用值)来确定该指标的权重,是一种客观赋权方法。在信息论中,Shannon熵作为熵的重要分支,因其既考虑到信息的偏差程度又考虑到信息的模糊程度,在多准则评价中有非常重要的意义[22]。
基于此,本文将采用Zhao 等[23]定义的犹豫模糊Shannon 熵计算权重,使其既同时考虑信息的偏差程度和模糊程度,又能解决信息不对称的问题,且相比其他权重,Shannon 熵计算简便,原理简单。接下来,本文将给出Shannon 熵计算犹豫模糊多指标评价的指标权重。


步骤4:从集结决策矩阵中选取正负理想解。正理想解是待评专利集中并不存在的虚拟最佳专利类,它的每一个指标值都是决策矩阵中该指标的最优值;负理想解则是虚拟的最差专利,它的每一个指标值都是决策矩阵中该指标的最差值。在多指标评价过程中,其评价指标通常可以分为“效益型”指标、“成本型”指标。设为正理想解,为负理想解,可得,

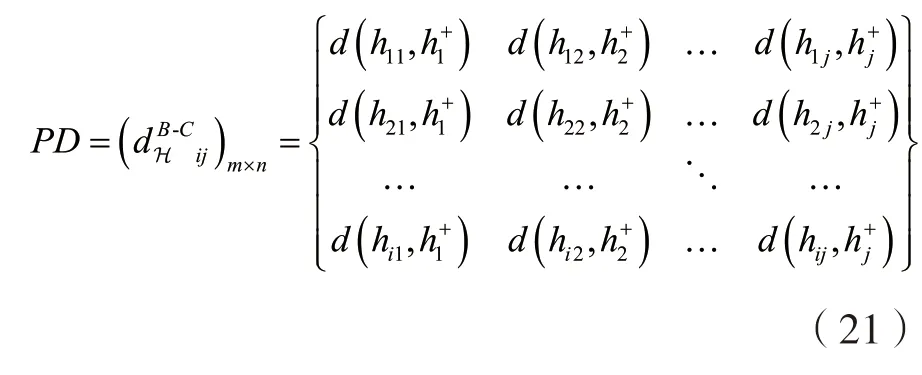
步骤5:利用犹豫模糊Bray-Curtis 距离测度分别计算每一待评专利与正理想解和负理想解的距离。

因此,得到待评专利与正理想解的距离矩阵PD、待评专利与负理想解的距离矩阵ND。

步骤6:分别从待评专利与正理想解的距离矩阵中和待评专利与负理想解的距离矩阵中计算每个指标下的平均值,得到每个指标的平衡参考解AVj。

步骤7:为得到待评专利各评价指标的优劣势情况,利用基于极值状态下所得到的平衡参考解计算距离矩阵来判断指标的优劣性。若指标评价值高于平均水平,该指标则优;相反,该指标则劣。下面给出不同类指标的距离公式:
若指标 为效益性指标,则

若指标 为成本型指标,则

则得到

步骤8:计算出待评专利到平衡参考解的总距离,并将其标准化。

其标准化为

其标准化为

其中,SPi为正向距离矩阵总和,NSPi为标准化正向距离矩阵总和,SNi为负向距离矩阵总和,NSNi为标准化正向距离矩阵总和。
步骤9:计算待评专利的综合优劣势度。为使得到的专利类满足最接近于正理想解且远离负理想解,本文将原始贴近度改进如下:

最后根据综合优劣势度大小对专利类进行排序,综合优劣势度最大的为最优专利。
3 实例分析
在这一部分中,本文将通过构建指标体系并应用所提出评价模型的方式,进一步验证模型的实际操作性,并通过其他方法的对比分析证明其优越性所在。
W 公司为东莞市内的一家高技术企业,该公司为提高专利质量,实现企业创新的高质量发展,建立了企业专利质量战略。目前,企业欲对 4 类重要专利的质量进行评价。
3.1 指标选取
专利质量的高低是进行专利维持、转化等经济决策的重要参考,也是科技创新产出准确、客观的度量标准之一[24]。因此,准确地评价专利质量,对企业提升技术创新实力,分析竞争对手实力、制定专利战略都具有非常重要的意义[24]。基于此,国内外不少研究机构和学者建立了系统的专利质量评价指标体系。例如,Pantros 公司出版的专利因子指标报告从法律、商业和技术3 个层面对单件专利质量进行了全面的评估[25];张希等[26]综合考虑技术、竞争、市场、法律等因素对专利质量的影响,构建了评价指标体系;张黎等[27]从技术水平、经济价值和权利保护3 个维度构建了专利质量评价指标体系;孙振嘉等[28]从专利数量指标、专利质量指标、技术能力指标以及发展能力指标4 个方面构建了企业专利水平测度指标体系。通过对以上文献的研究分析,本文以专利质量评价为出发点,从技术价值、市场价值和权利价值3 个维度出发构建了企业创新背景下专利质量评价指标体系,见图2。
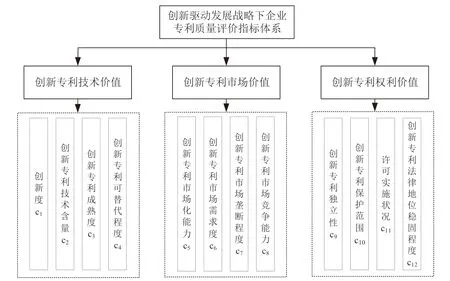
图2 创新驱动下企业专利质量评价指标体系
为保证最优专利类选取的有效性与权威性,该公司方聘请了8 位国内知名的企业专利质量评价领域的专家以及7 位公司内部熟悉企业文化、曾参与过公司创新专利项目质量建设的专家,随机成立3个专家组,每个专家组5 位成员组成。整个评价过程中,所有专家组成员不能见面和交流,有利于消除权威对决策带来的影响,鼓励专家提出与众不同的想法,并通过收集并整理资料,不断进行信息反馈,深入研究,修改判断,从而科学合理地得到能够基本反映所有专家意见的评分结果。为方便描述,下面将以上四类专利类别简称为x1、x2、x3、x4。(见表1)
3.2 评价步骤
利用本文所构建的指标体系与评价模型对企业专利质量进行评价,并确定最优专利类,步骤如下:
步骤1:根据各专家组给出的评价值构造犹豫模糊决策矩阵。由各专家组e1,e2,e3对4 类专利进行评价得到评价结果,且考虑到上文所述的模糊性等问题,本文为兼顾各专家群组的综合意见,现用犹豫模糊集的形式来表达评价信息情况,见表1。
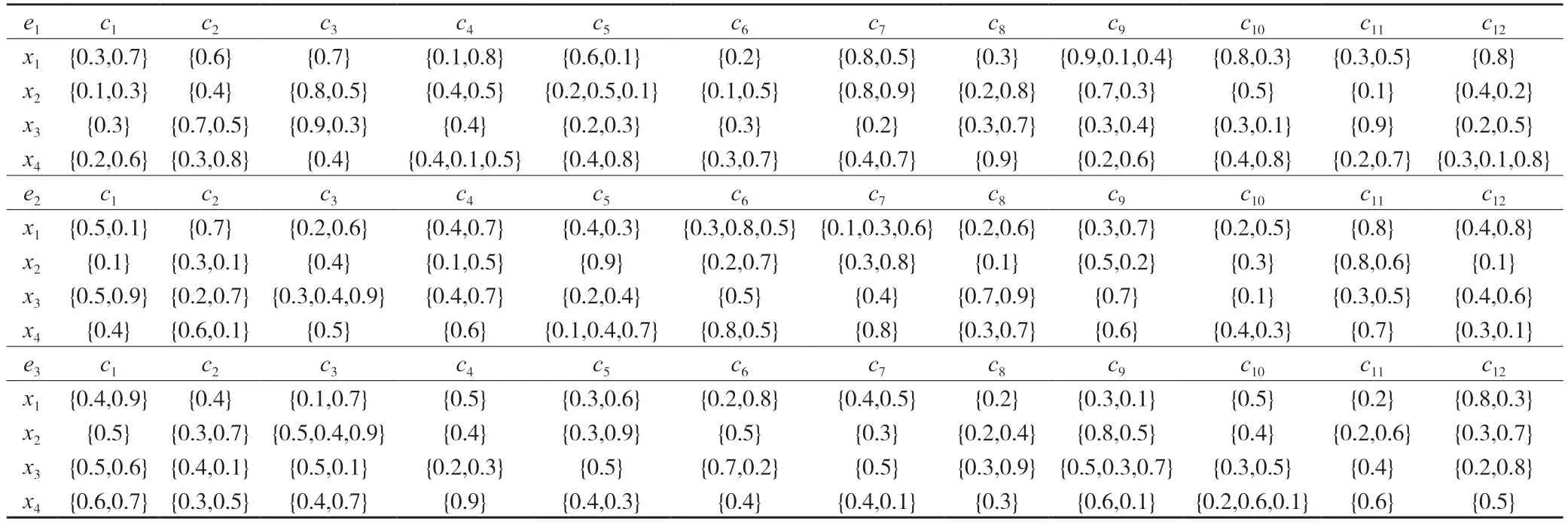
表1 犹豫模糊决策矩阵
通过以上各专家组给出的评价信息可以初步判断,第1 类专利在(创新度)、(创新专利市场垄断程度)、(创新专利独立性)指标平均得分上相对于其他三类专利在同一指标下得分较高,第2 类专利在(创新专利成熟度)、(许可实施状况)指标平均得分上相对于其他三类专利在同一指标下得分较高,第3 类专利在指标(创新专利技术含量)、(创新专利市场竞争力)平均得分上相对于其他三类专利在同一指标下得分较高,第4 类专利在指标(创新专利可替代程度)、(市场化能力)、(创新专利市场需求度)、(创新专利保护范围)和(法律地位稳固程度)平均得分上相对于其他三类专利在同一指标下得分较高。此外,通过问卷调查与专家询问法,可替代程度、市场化能力、专利保护范围以及法律地位稳固程度影响实际企业专利质量的程度相对其它指标要高。
步骤2:利用上文所述的指标确定方法将指标进行标准化处理后,根据式(11)~式(12)计算各指标权重,如表2 所示。

表2 指标权重
步骤3:将各指标权重加权到决策矩阵;再根据式(13)进行集结,得到一个集结矩阵。这种集结方式充分利用了原始信息,避免有效信息的丢失,且能体现各指标与各专家组的重要性程度,如表3所示。

表3 信息集结决策矩阵
步骤4:根据信息集结决策矩阵确定待评专利质量指标正理想解和负理想解,设为正理想解,为负理想解,如表4 所示。

表4 正负理想解
通过以上确定的待评专利的正负理想解,可以进一步判断,第4 类专利的指标相对其它三类专利的占优势度高。
步骤5:利用式(19)~式(20)计算待评专利与正负理想解的犹豫模糊Bray-Curtis 距离,如表5 所示。

表5 待评专利与正负理想解的距离
由表5 可知,第4 类专利类与正理想解得距离最小,与负理想解的距离最大,初步推断该类为最优类。同时,可知第2 类专利类与正理想解得距离最大,与负理想解的距离最小,初步推断该类为最劣项。
步骤6:根据距离矩阵PD 和ND,利用式(23)计算待评专利每个指标的平衡参考解,如表6 所示。

表6 指标综合参考解
步骤7:根据式(16)~式(19)确定待评专利到平衡参考解的距离,从而得到一个正向距离矩阵和一个负向距离矩阵,如表7 所示。

表7 正向距矩阵与负向距离矩阵

表7(续)
由表7 可知,第4 类专利到平衡参考解的正向距离最少,到平衡参考解的负向距离最多,可进一步确定第四类专利为最优专利,同理可得到第2 类专利为最差专利。
步骤8:根据式(24)~式(33)计算出待评专利到平衡参考解的总距离,并将其标准化,如表8 所示。

表8 各专利到平衡参考解的距离
由上表可知,按照各专利类到平衡参考解的距离可知,最优专利类基本锁定为第4 类,最差专利基本锁定为第2 类。
步骤9:根据式(34)~式(35)计算待评专利的综合优劣势度,得到的最优专利类别符合管理者的最大满意程度和最小失望程度,如表9 所示。

表9 综合优劣势度及其排序
按照SSi值大小对待评专利进行排序,可知第4类专利为最优专利(验证了过程数据判断),第3 类专利次之,第2 类专利质量最劣。因此,以第4 类专利为参考,其他三类专利可从c4(可替代程度)、c5(市场化能力)、c10(专利保护范围)、c12(法律地位稳固程度)进行改进与提高。
3.3 方法比较分析
为了说明本文方法的优越性,与其他3 种不同的评价方法进行比较。这3 种评价方法分为两种情况:(1)不考虑数据差异,基于传统欧氏距离使用文献[21]的方法对待评专利进行优劣排序。(2)只考虑选取极值作为理想解对评价的影响,使用传统犹豫模糊TOPSIS 方法如文献[29]对专利进行优劣排序;只考虑平均值作为参考解对评价的影响,使用文献[30]的方法对专利进行优劣排序。将以上3 种方法得到的结果与本文结果进行比较,如表10 所示。

表10 方法比较
比较分析以上不同方法的评价结果可知:当基于传统欧氏距离[21]计算各专利的综合贴近度,可知第4 类专利为最优专利,与本文方法得到的最优专利类相同,但两种方法计算结果的不同之处在于第1 类专利与第2 类专利的排序,即本文方法的排序结果是第1 类专利优于第2 类专利,存在差异的原因在于传统欧氏距离对于长度不同的HFS 需要进行预处理(补齐或删除隶属值),其没有考虑数据差异给最终结果带来的影响。因此,第1 类专利应优于第2 类专利,本文结果更为准确。
当仅考虑参考解为极值时,使用文献[29]计算得到第3类专利为最优专利,第2类专利为最差专利,与本文方法得到的结果相差甚大,但聚焦于原始数据可知,第4 类专利的c1(创新度)、c3(创新专利成熟度)、c4(可替代程度)、c8(创新专利市场竞争力)、c10(专利保护范围)、c12(法律地位稳固程度)指标评价值在不同程度上都优于第3 类专利,可知本文方法所得到的结果精确度高于仅考虑极值作为参考解的方法精确度。
当仅考虑参考值为平均值时,使用文献[30]计算得到第4 类专利最优,第2 类专利最差,与本文结果的最优专利和最差专利相同,但第1 类专利和第3 类专利的排序有所差别。由原始数据可知,第3 类专利的c1(创新度)、c3(创新专利成熟度)、c4(可替代程度)、c10(专利保护范围)、c11(许可实施状况)、c12(法律地位稳固程度)指标值都优于第1 类专利,其他指标第1 类专利与第3 类专利差别不大,因此第3 类专利优于第1 类专利。本文方法相较于仅考虑平均值为参考解的方法略胜一筹,但两种方法的最优专利与最差专利的排序是相同的,这在一定程度上反映了当代管理者以平均解作为参考标准的思维选择方式更适合处理多指标以及冲突指标的决策问题。
因此,本文方法在评价过程中同时考虑了极值与均值对待评专利的影响,还考虑了数据的差异性给评价带来的影响,得到的最终结果更加符合实际评价情形。
4 结论
在创新驱动发展战略背景下,企业专利质量的评估成为企业创新管理的重要内容。本文基于犹豫模糊Bray-Curtis 距离测度,构建了集成TOPSIS 法的依赖极值参考解思想和EDAS 法的依赖均值参考解思想的以指标优劣水平为性能度量的评价模型。通过以东莞W 高技术企业的4 类专利质量评价为例,对所提方法的可行性进行了验证,并与未考虑数据差异性的专利评价方法、犹豫模糊TOPSIS 法和犹豫模糊EDAS 法进行对比,验证了所提方法的优越性,为该问题的解决提供了一定的技术支撑。此外,评价结果表明在创新驱动发展背景下,企业可从创新专利的可替代程度、市场化能力、专利保护范围以及法律地位稳固程度这几个方面提高专利质量。
猜你喜欢
金桥(2022年7期)2022-07-22
汽车观察(2021年11期)2021-04-24
中学生百科·大语文(2021年2期)2021-03-08
花火彩版A(2021年11期)2021-02-08
读与写·教育教学版(2017年10期)2017-11-10
南都周刊(2015年4期)2015-09-10
南都周刊(2015年3期)2015-09-10
南都周刊(2015年1期)2015-09-10
中国发明与专利(2007年7期)2007-08-09
