基于模糊神经网络的二自由度主动悬架滑模控制系统设计
2021-10-08 02:22李娜
计算机测量与控制 2021年9期
李 娜
(商洛学院 信息中心,陕西 商洛 726000)
0 引言
在车辆行驶过程中,良好的主动悬架模式能够保证乘坐人员舒适性,如果车辆座椅悬架系统优化性能较差,受路面行驶条件的影响,汽车行驶过程中会出现较大震动[1]。尤其是一些大型的重型车、工程车和农用车等,在行驶条件差、载重量大的状态下,容易出现过大震动现象,影响乘车人员舒适性[2]。为此,设计主动悬架时,避免主动悬架抖动现象是具有必要性的。针对提出的问题,设计二自由度主动悬架结构,保证其在凹凸不平路面下,也能具有良好行驶效果。
近年来,许多控制系统被广泛应用于汽车悬架设计之中,包括基于PID控制主动悬架控制系统,该系统是一个二自由度线性系统,结合PID控制算法控制主动悬架[3]。然而,该系统受到车辆行驶不规则影响,导致车身减震效果较差;基于自适应控制主动悬架控制系统,该系统结合簧上加速度,调整滤波器权重系数,以此控制主动悬架。然而,该系统受到车轮与地面动荷载影响,导致车身减震效果较差。
庞辉[4]等人利用故障调节因子表示作动器故障的大小,进而获得考虑悬架系统质量不确定性和作动器故障的车辆主动悬架控制模型,结合滑模控制与自适应理论,设计合适的滑模面函数和滑模容错控制律,以达到故障悬架系统的容错控制目的,基于Lyapunov稳定性理论分析悬架系统安全约束性能。秦武[5]等人提出了具有扰动观测器的滑模控制方法。由1/4汽车模型中簧载质量的受力平衡条件,得到了1/4汽车模型的二阶线性控制系统。在路面激励位移未知时,设计基于滑模控制的扰动观测器,根据扰动观测器的估计值,计算了具有扰动观测器的滑模控制的1/4汽车模型的控制力。
基于此,结合模糊神经网络,设计二自由度主动悬架滑模控制系统。
1 系统硬件结构设计
设计的基于模糊神经网络的二自由度主动悬架滑模控制系统硬件结构如图1所示。
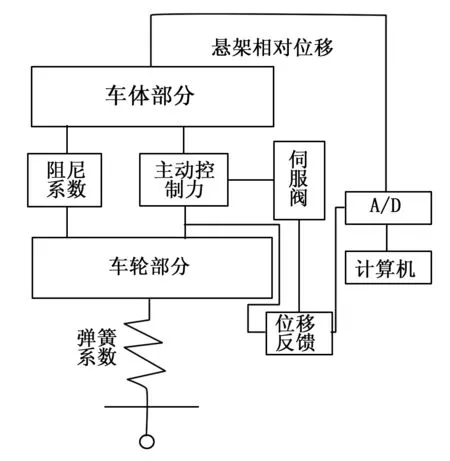
图1 系统硬件结构
由图1可知,该系统是由车体部分、车轮部分、主动控制模块、伺服阀、A/D转换器等模块组成的,控制主动悬挂,该悬挂结构能满足车体主震动要求的频率范围。
1.1 液压伺服系统
将汽车的左前悬挂、右悬挂、左后悬挂和右悬挂被动元件与4个液压缸分别相连,这些液压缸的动作由伺服阀进行控制。
根据汽车主动悬挂的具体情况,优化设计伺服系统:
(1)把液压系统并联的3个换向阀作为旁通阀,在液压系统发生故障时,可以直接将旁通阀和电磁阀串联起来,在电磁阀工作时,可以带动旁通阀一起工作。通过旁通阀工作于液压系统上、下两油腔,就像主动悬挂系统工作一样[6]。针对液压缸下腔在活塞上升时的体积增大小于上腔体积变化的实际情况,设计了两个体积仅0.6升的小型储油器,用于储存多余的油。在旁通阀右边的电磁铁启动后,液压缸上、下腔内的油就会释放流回油箱[7]。
(2)电液伺服系统中,为了有足够的空间存放各种设备,需要将蓄电池悬挂在汽车油箱附近以减少蓄电池占用的空间。
1.2 磁流变阻尼器
通过对圆柱形活塞腔及下腔注入工作液的方法,使磁化流变液充满腔体,在活塞槽内缠绕线圈,由活塞杆中心的线圈孔引出[8]。磁流变阻尼器通过线圈引出不同电流,产生相应的磁场,磁场中磁阻尼特性的变化,决定了阻尼器的阻尼力,并通过调整电流大小来控制其变化[9]。
1.3 自适应减振座椅悬架
自适应减振座椅悬架,如图2所示。

图2 自适应减振座椅悬架
由图2可知,该结构是由车体、车轮、控制器、功率放大器、称重传感器组成的,首先通过称量传感器获取车身重量,将其与弹簧系数相结合,实现了对车轮加速度的检测。然后将采集到的数据传递给主机,由主机下达信号处理指令[10]。通过调整线圈,磁流变阻尼器内部电流发生变化。电流变化促使磁感应强度也随之改变,由此获得理想的阻尼系数,实现减振座椅悬架的自适应控制。
2 系统软件部分设计
2.1 二自由度主动悬架滑模控制模型构建
构建的二自由度主动悬架滑模控制模型,如图3所示。

图3 二自由度主动悬架滑模控制模型
由图3可知,该模型是由质量模块、弹簧、阻尼和控制力组成的,依据牛顿定律可计算悬架弹性元件受到的力,计算公式为:
(1)
公式(1)中,k11、k12均表示荷载增量与变形增量之比;g表示重力加速度;k1、k2均表示弹簧劲度系数,与弹簧材质有关;c1、c2均表示额定负载与功率实际阻抗比值;u表示主动作用下的控制力;m1、m2分别表示弹簧质量和其他零件质量;xs、xu分别表示车身和轮胎相对于地面变化的位移;q表示路面不规则度;x1、x2均表示主动悬架位移发生的位移。
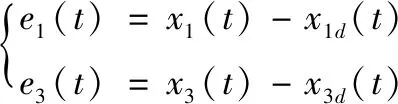
将 1/4 主动悬架模型和参考模型的车身垂直位移差和轮胎垂直位移差作为系统参量,定义两个状态的跟踪误差为:
(2)
式中,x1d(t)、x3d(t)表示x1(t)、x3(t)的期望参考轨迹,滑模控制的切换函数表示如下:
(3)
其中λ1、λ2、μ1、μ2是滑模面参数。在滑模面上满足s(t)=0。
实际系统存在诸多不确定性并且反馈回路往往受到环境噪声的干扰,导致实际系统不能单纯由等效控制器进行控制。需要进行约束分析。
2.2 控制目标及约束条件分析
主动悬架双自由度滑膜控制,旨在保证车辆在安全行驶条件下,乘坐人员有一定的舒适度。在主动悬架结构中,为了给乘客提供舒适,需要通过调整座位的主动悬架系统,通过轮胎加速度、悬架动力行程和动力位移来确定。
1)轮胎加速度:
驾驶者和乘客身体在垂直方向上的震动加速度是衡量驾驶舒适度的主要指标,也就是说,座椅质心处的震动加速度要尽可能小。
2)悬架动力行程:
悬架动力行程是衡量乘坐人员舒适度的一项重要指标,其与悬架动力位移密切相关。悬架动力行程越长,说明汽车行驶过程中出现的震动现象吸收能力就越强,为了避免动行程过大影响乘坐的舒适度,应延长悬架动力行程。
3)悬架动力位移:
悬架动力位移是衡量乘坐人员舒适度的另一项重要指标,其与地面附着力密切相关。悬架动力位移指的是伸缩距离最低到最高点变化的距离,该距离是可以通过减小车胎动态位移来调节的。悬架动力位移越长,说明汽车行驶过程中出现的震动现象吸收能力就越强,为了避免动行程过大影响乘坐的舒适度,应缩短悬架动力行程。
悬挂系统的设计除满足基本目标要求外,满足约束条件实现目标优化。
约束条件为:1)为确保胎面具有良好的附着性能,应确定轮胎的静态载荷比动载荷大;2)为了避免悬挂系统受到破坏,悬挂动力行程要小于汽车动态行驶的偏转行程范围;3)为使滑膜控制系统在理想工作状态下工作,需要保证控制力小于主动悬挂控制的最大输出力。
2.3 基于模糊神经网络控制方案设计
主动悬架双自由度滑膜控制系统要求模型精确,无外界干扰,但实际系统中存在很多不确定性,反馈回路受环境噪声干扰大,不能有效地实现简单等效控制。因此,为了避免车身抖振,引入模糊神经网络,克服系统的不确定因素影响,有效抑制了高频振动。
因为模糊神经网络的参数是冗余的,所以对网络进行裁剪以降低网络的复杂度。模糊控制规则如图4所示。

图4 模糊控制规则
如图4所示,该模糊控制器通过接收输入的程序语句,并通过电压控制指令和电流传输来调整误差,再利用动态负载平衡机制来完成编程输出。当输出与输入误差最大时,模糊控制系统具有较高的自校正精度。对于模糊控制系统的自校正,误差是根据输入值的大小来计算的,当误差小于某一数据的标准值时,系统可以满足自校正要求。
对于小连通度参数,在每次训练之前设置一个阈值,并及时删除阈值以下的特征,使模糊神经网络结构逐步转化为具有迭代训练特征的稀疏网络结构。在此基础上,利用模糊神经网络设计了主动悬架滑膜控制方案,其控制参数并非最终控制参数,而是连接的权重,具体控制步骤如下所示:
1)初始化神经网络,训练样本数据;
2)计算网络权值,确定目标最小值,如下所示:
Q={K|g(K)>0}
(4)
公式(4)中,g(K)表示约束条件,K表示趋近律系数。
3)依据约束条件,删除小于阈值的网络连接权值,确定每层网络最小数量的网络连接;
4)将特征向量输入分类器,输出分类结果;
5)在确定了目标函数和约束条件之后,结合模糊神经网络输出最佳个体。在数据不断更新的过程中,经过迭代,最终达到最佳目标;
6)以实现滑膜控制为目的,结合模糊神经网络,优化模糊控制器参数。
3 试验
为了验证基于模糊神经网络的二自由度主动悬架滑模控制系统性能,在Matlab上进行试验分析。悬架系统中的橡胶元件的静、动态特性的测试是通过 MTS 试验台进行的。
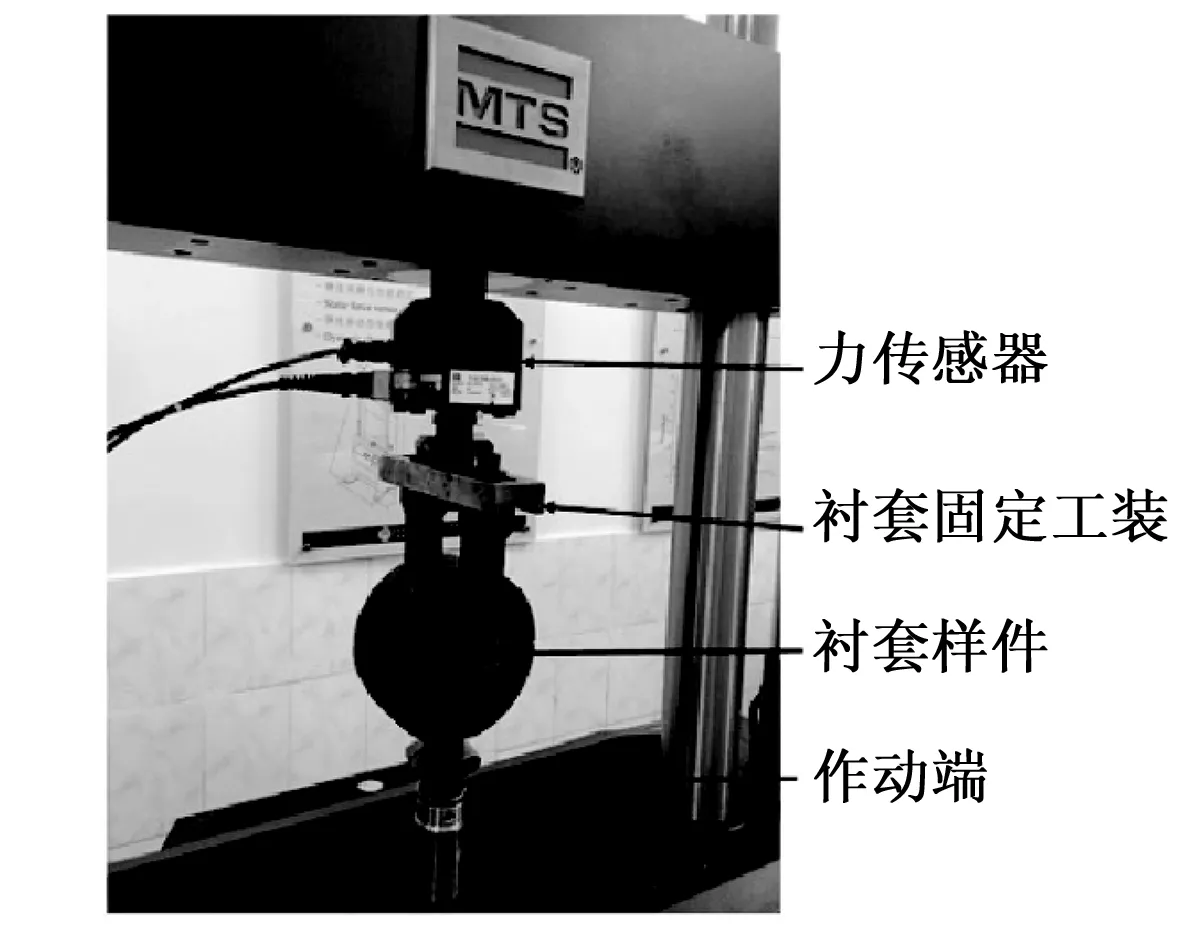
图5 测试平台及试验夹装方式
3.1 车辆参数
充分考虑车辆主动悬架系统和路面行驶条件,确定车辆参数,如表1所示。

表1 车辆参数
根据已经确定的参数,在Matlab环境下进行试验验证。
3.2 试验结果与分析
将车速参数相结合,车辆行驶速度为每小时60公里,行驶过程中存在5.0×10-3(m/s)的白噪声,在此情况下,主动悬架车体震动加速度功率谱密度如图6所示。
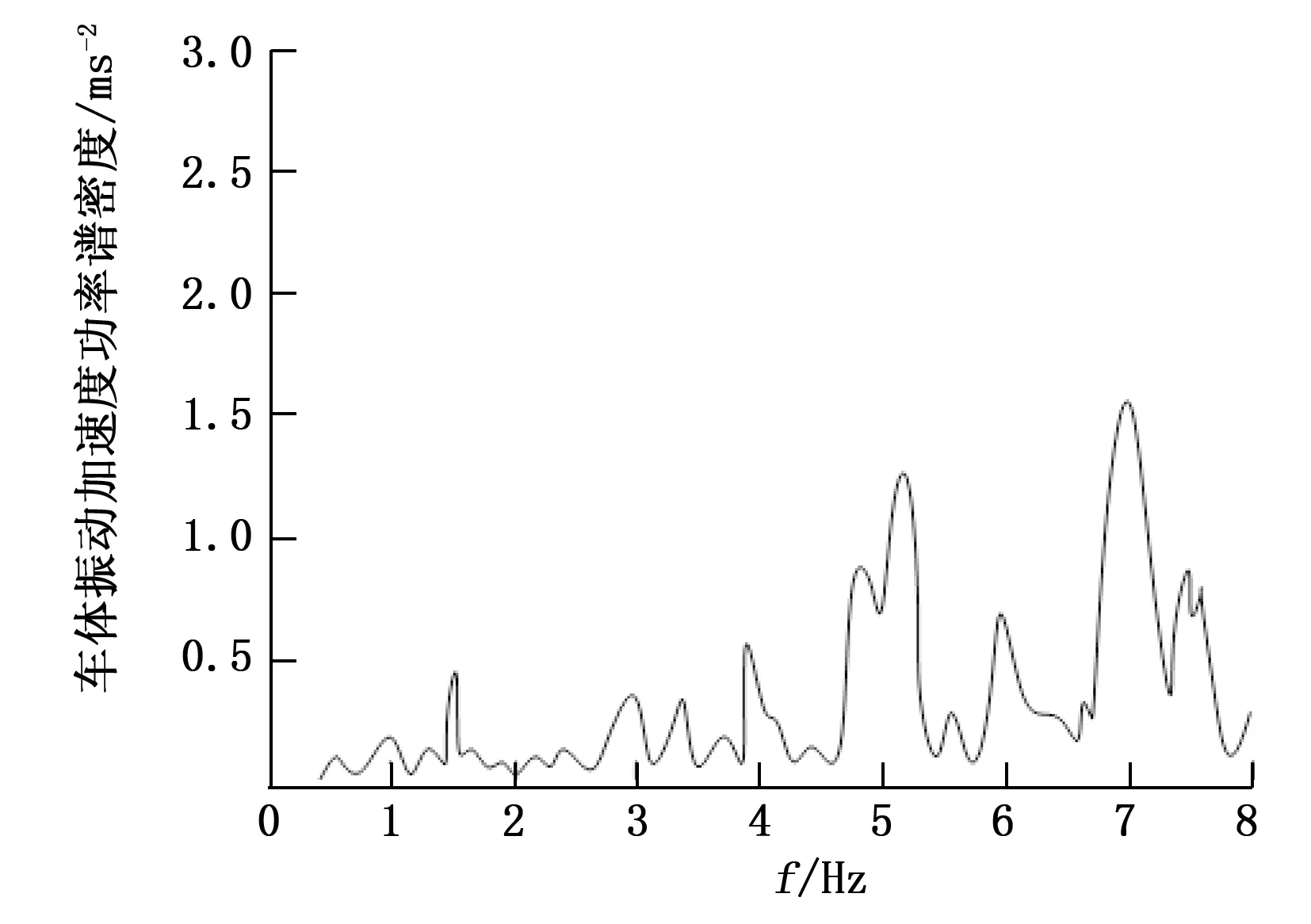
图6 主动悬架车体震动加速度功率谱密度
由图6可知,从1 Hz到10 Hz频率变化范围内,主动悬架车体震动出现了较大的衰减变化。
基于上述实际数据,分别使用基于PID控制主动悬架控制系统、基于自适应控制主动悬架控制系统和基于模糊神经网络的二自由度主动悬架滑模控制系统对车体震动加速度功率谱密度进行对比分析,结果如图7所示。
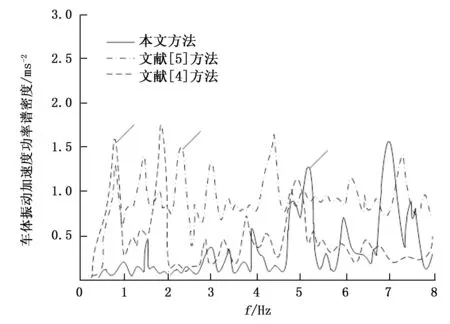
图7 3种系统车体震动加速度功率谱密度对比
由图7可知,使用基于PID控制的主动悬架控制系统,其功率谱密度与实际情况不一致,从1 Hz到10 Hz频率变化范围内,主动悬架车体震动衰减变化不明显,从最初的1.6 ms-2到最终的0.7 ms-2。使用基于自适应控制的主动悬架控制系统,其功率谱密度与实际情况不一致,从1 Hz到10 Hz频率变化范围内,主动悬架车体震动衰减变化比基于PID控制主动悬架控制系统明显,从最初的0 ms-2到最终的0.5 ms-2。使用基于模糊神经网络的二自由度主动悬架滑模控制系统,从最初的0 ms-2到最终的1.5 ms-2,其功率谱密度与实际情况一致,主动悬架车体震动衰减变化明显。
4 结束语
针对二自由度主动悬架滑模控制系统设计了模糊神经网络控制模型,实现二自由度主动悬架滑模控制。由试验验证了该系统设计的合理性,能够有效控制阻尼,使车辆舒适性得到明显改善。针对滑膜控制系统的研究内容,仅进行了二自由度主动悬架的滑模控制仿真设计,实际的汽车悬架结构比仿真模型复杂得多,在进行滑模控制时,不可避免地会出现振动问题,造成乘车人员极不舒服。针对这个问题,需要建立多自由度的悬挂模型,改善滑膜控制振动。
猜你喜欢
中国骨与关节杂志(2022年10期)2022-10-20
舰船科学技术(2022年10期)2022-06-17
舰船科学技术(2022年10期)2022-06-17
西部交通科技(2022年2期)2022-04-27
科学与生活(2021年24期)2021-12-06
电机与控制学报(2019年10期)2019-12-03
速读·上旬(2019年2期)2019-10-21
中国民族民间医药·下半月(2014年2期)2014-09-26
计算机辅助工程(2012年5期)2012-11-21
中国医药导报(2011年27期)2011-12-31