斥力式混合磁悬浮体的控制系统设计
2021-10-05 12:49陈嘉淏李冰林
智能计算机与应用 2021年5期
陈嘉淏,李冰林,高 峰
(南京林业大学 汽车与交通工程学院,南京210037)
0 引 言
随着中国经济的快速发展,特别是工业化的进程,各种驱动装置对其体积、成本、环境污染等要求越来越高,混合磁悬浮技术采用电磁和永磁混合驱动,可以减小装置体积、实现悬浮位置可控,具有无摩擦、噪音低,能高速运转等特性[1]。在中国制药、工业、食品、国防等众多行业和领域有着广阔的应用空间和市场前景[2]。在各类磁悬浮控制装置中,需使控制对象的悬浮位置可控,同时为了满足实际需求,精度和稳定性控制显得十分重要[3]。同时在开发磁悬浮系统控制平台与台架试验过程中,实时对其参数进行监测,有利于系统调试以及直观地观测到系统运行的效果和稳定性[4]。
本文以斥力式混合磁悬浮系统为设计对象,通过设计霍尔传感电路来检测悬浮体的移动,采用四象限H桥驱动电路实现对电磁线圈的驱动,采用PID控制器实现对悬浮体的悬浮位置的稳定性控制。设计上位机软件对磁悬浮体运行系统的状态和控制参数进行监测,实时地获取磁悬浮体的位置和控制电流参数值,获得磁悬浮体的实时运行状态,为其控制提供保证。
1 混合磁悬浮体的控制系统结构
斥力式混合磁悬浮系统结构如图1所示。系统外圈为永磁环,永磁环内圈均布4个电磁线圈,还包含圆柱永磁悬浮体和检测3个方向位移大小的霍尔传感器。当悬浮体处于中心时,永磁环给悬浮体提供偏置磁场,在轴向产生推力的同时,在径向会对悬浮体四周产生一个向心推力,由于这个推力在悬浮体四周均匀产生,使悬浮体在径向所受的力基本抵消达到平衡[5]。当悬浮体偏离其平衡位置时,由永磁环所提供的磁场平衡被打破,此时通过X、Y方向的霍尔传感器检测磁悬浮体的位置偏移信息,并由控制器采集,输出PWM信号,通过驱动电路使4个电磁线圈流过电流,产生磁通,给系统提供一个附加磁场,使其产生附加径向力对悬浮体的位移进行修正,使得悬浮体重新回到平衡位置。

图1 混合磁悬浮系统结构组成Fig.1 Structure of hybrid magnetic levitation system
控制系统主要组成包括:MCU单元、串口通信电路、电磁线圈、霍尔传感电路、电流采集电路,线圈驱动电路,系统控制原理如图2所示。MCU为控制系统核心,实现对数据采集分析,对系统进行控制。MCU通过给驱动电路发送PWM信号,使电磁线圈产生电流和磁场,这种磁场力会作用到悬浮磁体,产生的位移由霍尔传感器检测,送回给MCU单元,同时电流采样电路对流经线圈的电流进行采样,便于后续对其参数进行监控。串口模块将MCU采集到的信息发送给上位机,实现对系统状态参数的监测,获得磁悬浮体的运行状态。
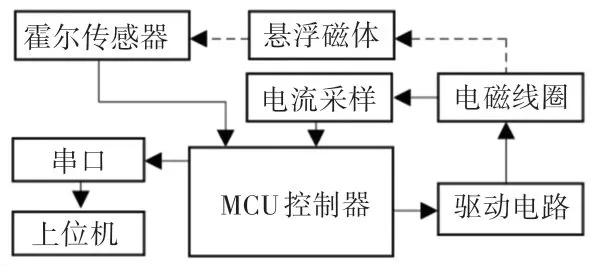
图2 混合磁悬浮系统控制原理框图Fig.2 Control principle block diagram of Hybrid Maglev System
2 系统的硬件设计
系统硬件电路组成部分主要包括:
2.1 MCU控制器最小系统
MCU控制器最小系统包含供电电路、时钟电路和复位电路。本文选用STC12C5A60S2处理器,指令代码与8051相兼容,但速度比8051要快8~12倍,工作频率可达35 MHz。片上集成有EEPROM、RAM存储器,内有8路10位模数转换器,有SPI接口、双串口,集成度高,ISP(在系统可编程)。处理器工作电压为5.5 V~3.3 V。MCU最小系统电路如图3所示。

图3 MCU最小系统电路Fig.3 MCU system circuit
2.2 线圈驱动和电流采集电路
H桥电路可以实现四象限驱动,能对电磁线圈进行驱动。L298N芯片包含2个H桥,每个桥可提供2 A的电流,供电电压可达48 V,逻辑电路接受5 V的TTL电平。为了检测各H桥的驱动电流大小,采用R20、R21 2个采样电阻对其采样,信号经调理后送入控制器的A/D采集通道,完成对控制电流的采集,具体电路设计如图4所示。
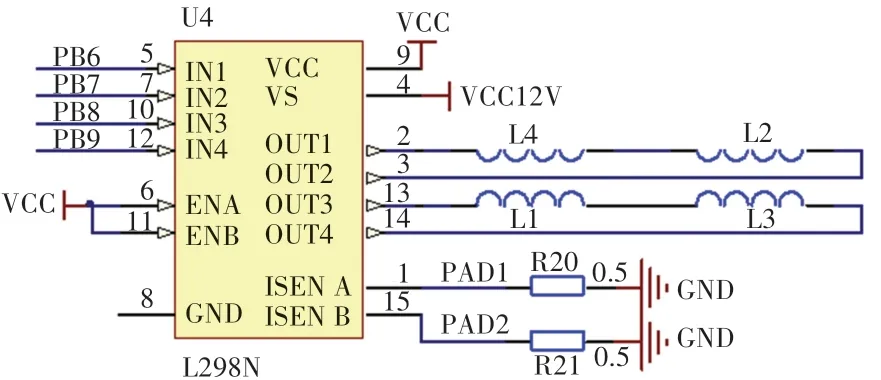
图4 电磁线圈驱动电路Fig.4 Electromagnetic coil drive circuit
2.3 串口通信电路
串口通信电路实现磁悬浮控制器与上位机之间的通信,把控制器所检测到的控制参数传送给上位机,实现对系统参数的监测。串口通信电路如图5所示,采用的是MAX232芯片。

图5 串口通信电路图Fig.5 Serial communication circuit
3 系统的软件设计
系统软件包含2部分,一部分为下位机混合磁悬浮控制系统的软件设计,主要完成对系统信号采集处理和输出控制;另一部分为上位机监测软件的设计,主要实现对系统运行状态参数的观测。
3.1 下位机控制系统主程序
系统控制主程序流程如图6所示。系统初始化主要完成对各输入输出接口、定时器等的初始化操作,同时给定悬浮位置参考值;读入霍尔传感器采集的位置信息,通过与设定值相比,根据对比偏差判断是否需要进行PID调节,如有需要,则补偿调节量,然后统一经过PWM计算及PWM信号输出之后,电磁线圈获得电流,产生磁场使得悬浮体修正其位置,再次采集更新后的位置信号,对比是否达到需求位置,循环比较直至磁悬浮体达到所设定的位置,然后把位置信息和检测到的电流信息通过串口通信发送给上位机。

图6 控制主程序流程图Fig.6 Flow chart of main control program
3.2 上位机软件监测系统
上位机软件的主要功能是磁悬浮体电控单元采集系统中控制悬浮线圈的电流大小和位移传感器的位移信息,通过串口通信把数据传送至PC机,这些数据信息包括磁悬浮X、Y、Z方向的位置信息,X、Y方向H电桥的控制电流信息,表征磁悬浮体的控制状态。同时,该软件具有实现参数显示以及数据的保存等功能。软件功能包括2大部分:监测模块、控制模块,如图7所示。
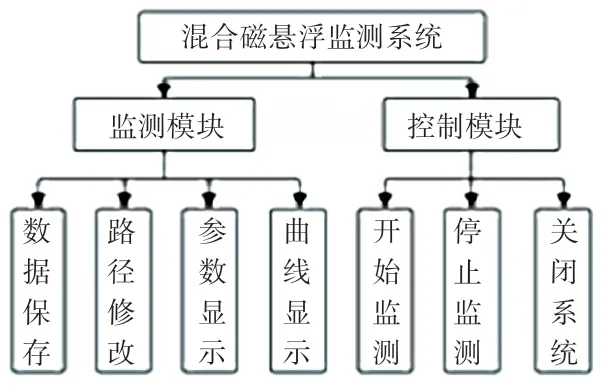
图7 上位机软件结构图Fig.7 Software structure of host computer
(1)监测模块包括:数据保存、数据保存路径更改、参数显示、曲线显示。主要是显示系统的参数如悬浮体的位置、控制电流大小等,并对故障代码进行保存。
(2)控制模块包括:通信连接、暂停监测、关闭系统。主要是对系统进行通信的连接、或者暂停、系统关闭等操作。
(2) 出流边界: 出口为超声速下游流场不影响上游流场, 将所有参数数值外推. 在大平板的侧缘同样采用出流边界条件.
软件获取的参数信息来自磁悬浮体电控采集单元串行通信接口,采用RS232通讯协议,其通信协议格式:
(1)帧格式:采用通用RS232 UART信号,每一个数据帧包含10 bit,具体格式为:

bit1:起始位;bit2-bit9:数据位;bit10:停止位。
(2)数据格式:每次发送的数据包有9个数据帧,其定义如下:
第1帧:D0-D7——0xAAH(数据包头1)
第2帧:D0-D7——0x00H(数据包头2)
第3帧:D0-D7——位置X值
第5帧:D0-D7——位置Y值
第6帧:D0-D7——电流Y值
第7帧:D0-D7——位置Z值
第8帧:D0-D7——电源电压
第9帧:D0-D7——校验和
串行通信中断流程如图8所示。为了使数据发送过程中不至于出现丢帧,导致接收的数据出现错误的情况,在每个数据包最后一帧发送校验和的字节,一旦数据不匹配,舍弃当前数据包数据,重新接收下一帧解包。

图8 串口通讯中断子程序流程图Fig.8 Flow chart of serial communication interrupts subprogram
4 系统实验分析
采用PID控制方法对悬浮体实现控制,PID控制器的具体控制参数为:X轴方向系数Kpx=0.65、Kix=0.001、Kdx=1.5;Y轴方向系数Kpy=0.75、Kiy=0.001、Kdy=1.6。系统实验平台如图9所示,悬浮体稳定地悬浮于4个电磁线圈中央,获得了控制效果。

图9 系统实验平台Fig.9 Experimental platform of Hybrid Maglev System
主监控界面反映控制系统各参数的变化,串口通道为COM2,波特率:9 600。在所设计的PID控制下,软件所监测到的磁悬浮体的位移和控制电流分别为:X位置为1.03、Y位置为0.85、Z位置为1.13、X电流为0.67、Y电流为0.98,如图10所示,系统参数最后保持稳定,证明了系统得到了有效控制。
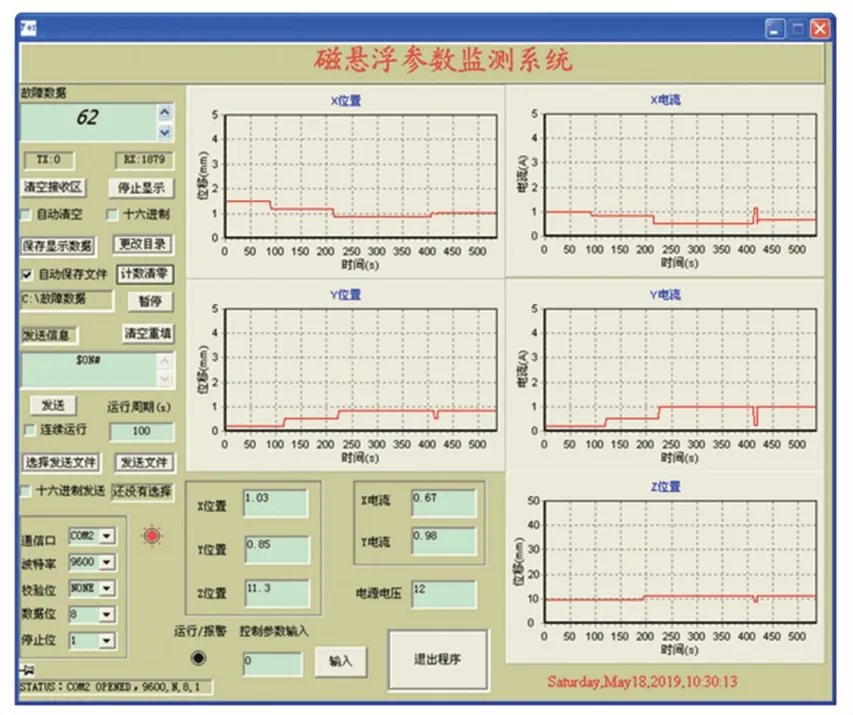
图10 参数监测界面Fig.10 System parameter monitoring interface
5 结束语
本文设计了斥力式混合磁悬浮控制系统,主要包含悬浮系统的位置检测电路和电磁线圈的驱动电路,软件采用PID控制算法对其进行控制;同时为了方便对系统运行参数实现监测,设计了系统参数的上位机监测软件,实现了对系统稳定性的控制和参数监控。
猜你喜欢
小猕猴智力画刊(2022年4期)2022-05-23
小学科学(2021年4期)2021-06-15
智族GQ(2019年9期)2019-10-28
东西南北(2018年14期)2018-10-16
中国科技教育(2016年12期)2017-08-11
电子技术与软件工程(2017年5期)2017-04-23
汽车观察(2015年10期)2016-04-06
电脑知识与技术(2014年11期)2014-06-18
中国信息化·学术版(2013年5期)2013-10-09
现代电子技术(2009年6期)2009-05-31