
基于交通风险评估的个性化换道触发研究*
2021-09-30 03:19朱乃宣高振海胡宏宇赵伟光
汽车工程 2021年9期
朱乃宣,高振海,胡宏宇,吕 颖,赵伟光
(1.吉林大学,汽车仿真与控制国家重点实验室,长春100025;2.中国第一汽车集团有限公司智能网联开发院,长春130011)
前言
道路环境的交通态势建模是智能车用来保障其在道路区域内安全行驶、防止侧翻和碰撞等危险状况发生的关键技术手段,已受到了广泛关注和研究。交通风险评估主要用于处理原始的传感器数据,通常包括来自立体视觉[1]、雷达[2]和激光雷达[3]的最低级别的原始数据,模型借助上述传感器数据,对当前车辆周围环境进行合理而简捷的表达,其主要信息有边界的位置信息(车道线、路沿、路口)和道路内的障碍物信息等。当前常见的态势评估方法是通过栅格地图或者人工势场法建立风险场模型。
栅格地图模型是贝叶斯占用过滤器[4]的变体,在智能车辆领域,基于贝叶斯占用滤波理论的占用网格已经被广泛地应用于各种研究中[5-9];至于采用人工势力场法建立风险场模型,是由Khatib提出的[10]。核心思想是障碍物产生斥力场,目标点产生引力场,机器人在合势场下沿着势场下降最快的方向移动。当前在决策规划领域中常用的方法为:建立道路、车道线和障碍车的斥力场以及目标点的引力场,根据车辆行驶轨迹求解势场参数[11-17]。
在换道决策方面,学者们致力于研究换道行为触发机理。其方法有基于规则[1]、随机效用理论[19]、跟驰模型[20]和最小安全距离模型[21]等。
近年来,为了使得驾驶辅助系统越来越人性化,与驾驶员特性相结合的个性化换道辅助系统的研究也正广泛进行。研究者通过传统聚类方法[22-23]、神经网络[24]、隐马尔可夫模型[25]、随机森林法[26]和支持向量机[27-28]等方法对驾驶员数据进行处理,对驾驶员的风格和能力进行分类,进而获得模型中不同的参数。
然而,现有的个性化换道触发研究大部分基于大量驾驶数据的采集,通过机器或者深度学习的方法获得驾驶员的特性参数。该方法受场景和数据质量影响较大,且可解释性差,无法正确分析驾驶员对交通风险的评估方式。
针对上述问题,为直观、合理地构建个性化的换道触发,本文中提取驾驶员日常驾驶的真实数据,从中提取出其换道数据,并基于人工势场理论搭建风险评估模型,通过对驾驶员实际换道中的风险分析,实现个性化的换道触发,最终通过实车试验进行了功能验证。
1 行驶风险场设计
本文中为了快速量化车辆在环境中的行驶风险水平,建立了障碍物的行驶风险场,该行驶风险场综合考虑了障碍物的外形尺寸和障碍物与自主车辆的相对运动。其中,静态风险场仅由障碍物本身属性以及外形决定;动态风险场则由障碍物的运动和自主车辆的运动所决定。此外,根据不同驾驶员对行驶风险容忍能力的不同,分析出各自在行驶过程中所能忍受的风险水平,为后续换道触发算法的开发奠定基础。
1.1 静态风险场
静态风险场主要考虑障碍物的属性和外形,其场强大小受两个因素的影响:一是自主车辆与障碍物的相对距离;二是自主车辆接近障碍物的方向。自主车辆与障碍物之间的相对距离越小,发生交通事故的可能性就越大,因而静态风险场的场强越大。对于机动车而言,其行驶方向受到限制,即机动车的侧向速度通常远小于纵向速度。因而,在障碍物的纵向方向上,静态风险场有较大的影响范围;而在障碍车的侧向方向上,静态风险场的影响范围较小。因此,对于障碍物的静态风险场可采用二维高斯函数。同时考虑到机动车的外形尺寸较大,机动车边缘与中心点的场强差值较大,故采用1阶中心距的二维高斯函数不太合适。为此,采用高阶中心距的二维高斯函数作为障碍物的风险危险场。高阶中心距展平了函数的峰顶,使得整个障碍物表面都有相近的风险场场强。静态风险场的公式为
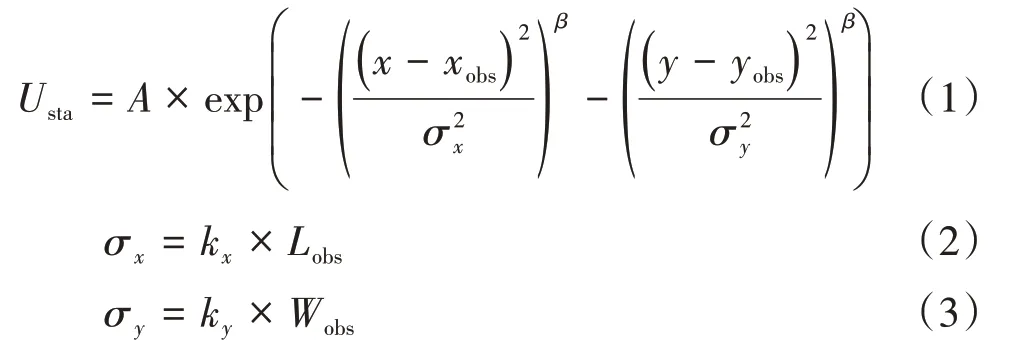
式中:(x,y)为交通环境内某一点的横纵坐标;(xobs,yobs)为障碍物中心点的横纵坐标;A为场强系数;β为高阶系数;σx和σy为障碍物的外形函数;Lobs为障碍物纵向方向的长度;Wobs为侧向方向的长度;kx和ky为障碍物横纵向尺寸系数。
以图1所构建的交通场景为例,规定行驶方向为X轴正向,车辆以id为索引,每辆车的位置和车速等数据如表1所示,其中车辆的横纵坐标为车辆质心的坐标,L、D和v分别为车辆的长度、宽度和速度。本文中均以自车id=0构建交通环境中的行驶风险场,静态及动态风险场中的参数取值如表2所示。
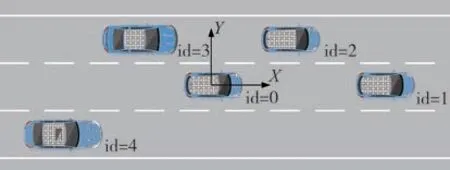
图1 交通场景示意图
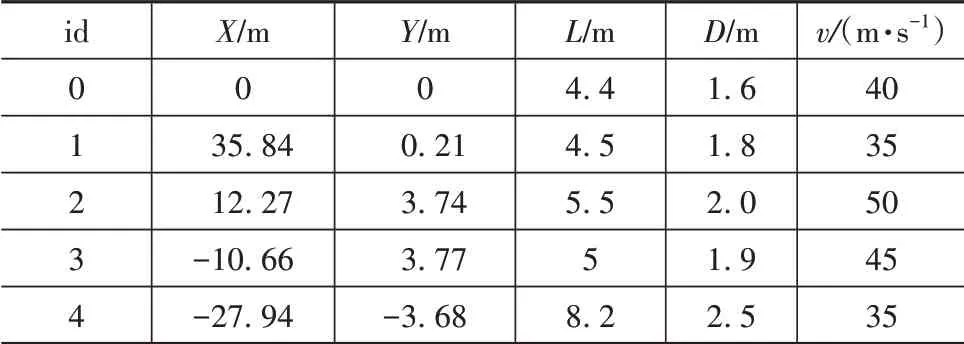
表1 车辆相关数据
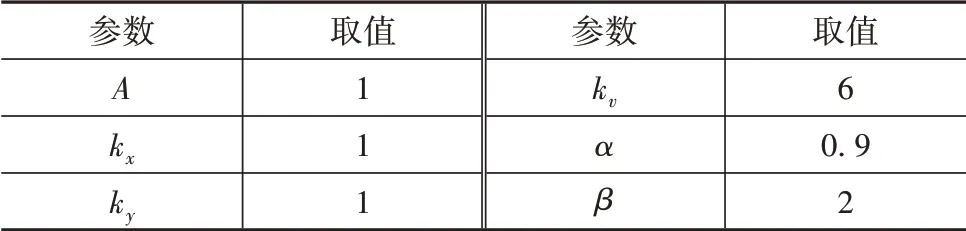
表2 行驶风险场参数取值
图1所示的交通场景中形成的静态风险场如图2和图3所示。从图2可以看出,静态风险场在障碍物的纵向方向上有较大的影响范围,而且随着障碍物纵向长度的增加,影响范围也越大。从图3可以看出,静态风险场的场强随着相对距离的减小而增大,对于接近障碍物边缘的点,场强接近峰值,整个障碍物表面的场强大小相近。因此,使用高阶中心距二维高斯函数建立的静态风险场基本满足要求。
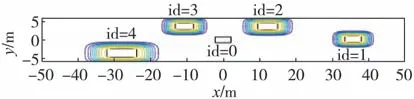
图2 静态风险场等势线
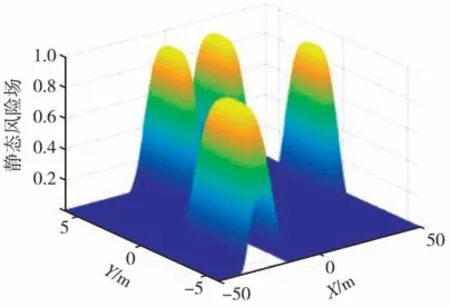
图3 静态风险场场强
1.2 动态风险场
动态风险场的构建需要综合考虑障碍物和自主车辆的运动。动态风险场的场强大小主要受到4个因素的影响,分别是相对距离、相对速度的绝对值、相对速度的方向和自主车辆的接近方向。当相对速度方向和接近方向相同时,相对距离越小,相对速度的绝对值越大,则引发交通事故的可能性就越大,因而动态风险场的场强越大。当其他3项相同时,相对速度的绝对值越大,则引发交通事故的可能性也越大,因而动态风险场的场强越大。
为了满足以上要求,本文中以二维高斯函数为基础建立了动态风险场。动态风险场的公式为
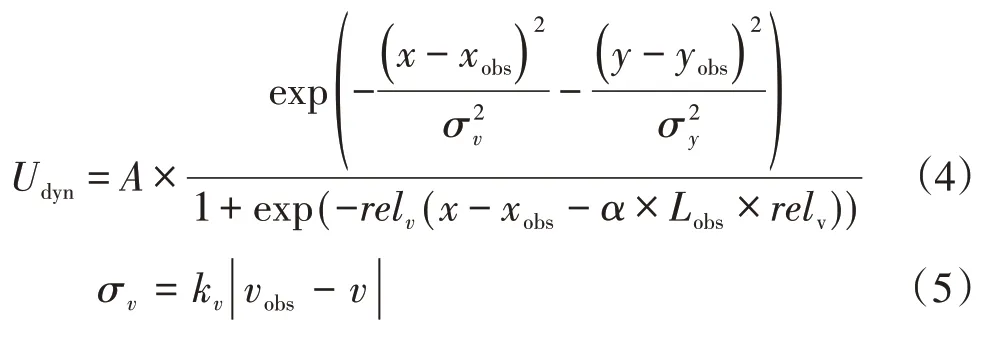

式中:σv为障碍物的速度与自主驾驶车辆速度的函数;vobs为障碍物在纵向方向上的速度;v为自主驾驶车辆的纵向速度;kv为速度系数;relv为描述障碍物与自主驾驶车辆相对运动方向的函数;α为相对速度系数,其余定义与静态风险场相同。kv和α具体取值见表2。
上述被视为障碍物的车辆的动态风险场等势线和场强如图4和图5所示。由图可见:动态风险场的场强随着相对距离减小而逐渐增大;当相对距离相等时,场强随着相对速度绝对值的增大而增大。动态风险场的峰值小于场强参数A,且与相对速度的绝对值大小有关,相对速度的绝对值越大,动态风险场的峰值越大。此外,动态风险场的峰值并不在车辆边缘处,它随着两车相对速度关系、相对距离和障碍车尺寸等参数进行动态调整。综上所述,构建的动态风险场基本满足要求。
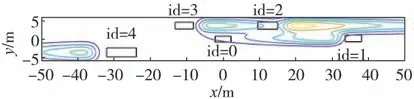
图4 动态风险场等势线

图5 动态风险场场强
1.3 总行驶风险场
车辆的总行驶风险场为静态风险场与动态风险场的叠加即

行驶风险场等势线如图6所示。由图可见,障碍物车辆1的车速小于自车,因此自车的前车(车1)相当于逐渐“接近”自车。如车4继续保持在当前车道行驶,随着自车与车1的相对距离的减小,自车受到的行驶风险场的场强越大。自车为了将受到的行驶风险场的场强维持在一定范围内,需要减速行驶。自车如果想要维持当前车速行驶,则必须换道。自车的左侧车道上,由于车2和车3都产生了较大的场强,而在右侧车道上,车4相当于“远离”自车,因此在右车道上的场强较低,故自车向右侧换道更为安全。综上所述,构建的行驶风险场能够识别车辆向右换道的趋势,同时计算出换道时的场强,以此评判驾驶员对风险的接受程度。
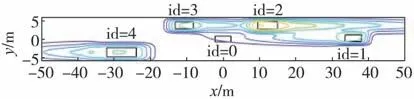
图6 行驶风险场等势线
2 个性化换道触发设计
2.1 驾驶员数据采集
为了辨识驾驶员的特性,在自由驾驶工况下进行大量试验,以收集各类驾驶员的驾驶数据。按图7所示的流程,构建了驾驶员行为数据采集系统,它使用了一辆真实车辆,辅以惯性导航、角毫米波雷达和VECTOR VN1630A CAN采集设备。整个系统用来存储驾驶习惯并收集驾驶数据。
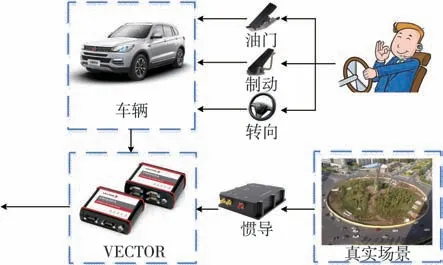
图7 驾驶员数据采集流程图
在采集系统中,驾驶员通过操纵车辆转向盘、油门踏板和制动踏板使车辆行驶。车辆的状态参数可从车辆OBD中通过CAN信号获得;真实的驾驶场景的经纬度和车辆加速度等信息可从惯性导航通过CAN信号获得;周围车辆与障碍物的相对位置、速度和加速度等信息通过车辆四角的毫米波雷达获得,每个角雷达可检测150°范围内的障碍物,最远可检测80 m,通过CAN信号传输,使用VECTOR VN1630A采集CAN信号。整个过程中总计录制了以下数据以便后续分析:车速、转向盘转角、转向盘转速、横纵向加速度、横摆角速度、制动主缸压力、油门踏板开度、经纬度以及周围障碍物的位置、速度、加速度。
试验地点在中国长春,选定了一段路线作为驾驶场景,选取的路段涵盖了常见的场景,如直行、连续弯道、环岛、换道、高架和拥堵等,全程约12 km,单次驾驶时长约25 min。
选择了30名驾驶员作为测试样本。正式测试前,驾驶员先对试验车辆进行一段时间的试驾,以熟悉车辆和试验步骤,除了设备外车上无其他配件。试验后对其驾驶员信息进行统计,如表3所示。

表3 驾驶员信息
2.2 换道数据提取
考虑到后续要分析驾驶员的换道触发,本文中将对自由驾驶数据进行了提取和分段,从中剥离出换道数据段进行分析。因此,本文中设定的转向行驶的条件是:
(1)车速v>2 m∕s2;
(2)转向盘转角δsw>5°;
(3)转向盘转速δ˙sw>5°∕s。
当汽车脱离稳定直线行驶时,开启数据的提取;当汽车重新进入直线行驶或者超过设定的工况持续时间Tcon(本文设置Tcon=7 s),则完成一段数据的提取,得到一组驾驶员转向的时序数据。
上述通过提取得到的均是由驾驶员操纵转向的时序数据,但是其中一部分是由于道路曲率的变化而使得驾驶员进行转弯操作。为了得到换道的数据,本文中对时序数据进行了航向角估算以排除非换道数据。
考虑到航向估计模型的简单易用且能真实反映车辆特性,本文中基于单车模型进行计算,使用单车模型需做如下假设:
(1)不考虑车辆在Z轴方向的运动,只考虑XY水平面的运动;
(2)左右侧车轮转角一致,这样可将左右侧轮胎合并为一个轮胎,以便于搭建单车模型,如图8所示;
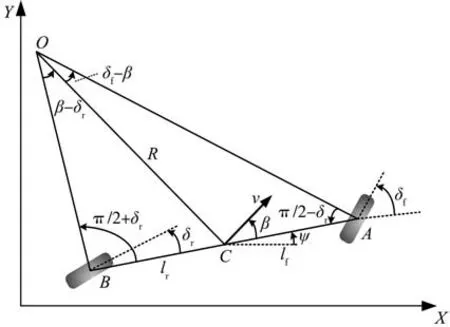
图8 单车模型
(3)车辆行驶速度变化缓慢,忽略前后轴载荷的转移;
(4)车身和悬架系统是刚性的。
具体符号定义见表4。
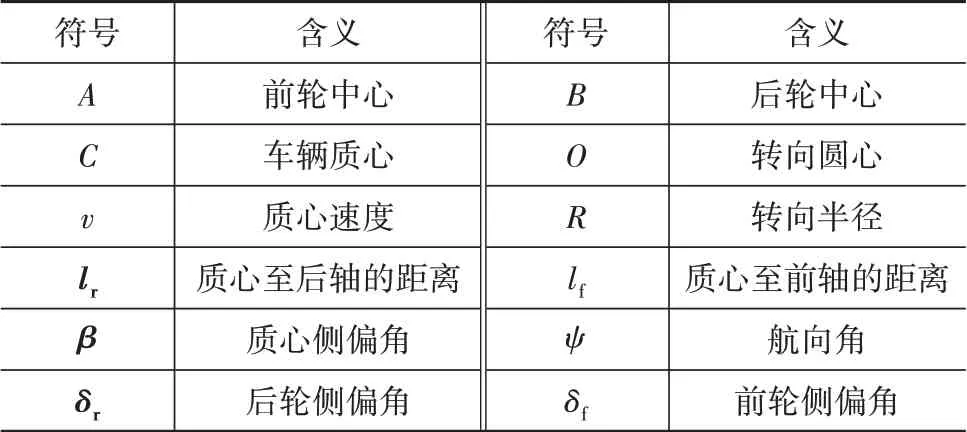
表4 单车模型参数定义
根据车辆动力学模型可得

同时假设车辆的方向变化率等于车辆的角速度,则车辆的角速度为

联立式(9)和式(10)可得

质心侧偏角可由式(12)获得

对˙在时间上积分可获得航向角的历程。
图9为两段提取的转向工况下转向盘转角和经过估算的航向角的时间历程,其中图9(a)反映了在该工况下车辆航向角整个时间段前后变化很小,由此可知该段数据为换道数据;图9(b)则表示了典型的转弯段数据的特征。由此,便可以将非典型的换道的数据从训练集中剔除。
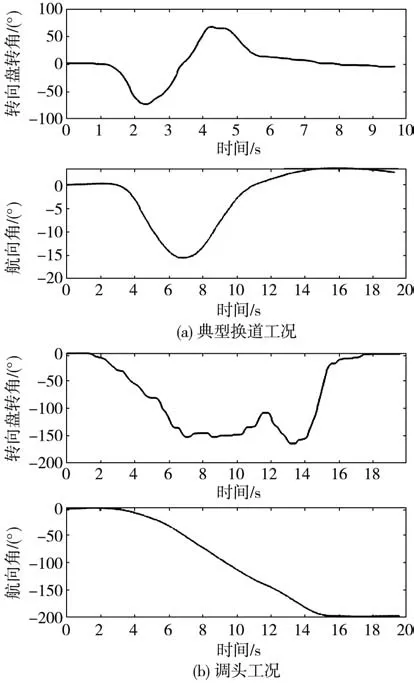
图9 典型换道工况和调头工况的转向盘转角和航向角
2.3 驾驶员换道风险机制分析
在完成了换道风险场计算后,本文中定义了两个阈值,分别为规划阈值Qp和安全阈值Qs。其中规划阈值Qp为驾驶员所能接受的自车车道前方风险场强度,安全阈值Qs则为整个换道过程中驾驶员所能接受的最大风险场强度。以图1的场景为例,Qp为换道开始时刻车1形成的行驶风险场;Qs为换道整个过程中所有车辆形成的行驶风险场的最大值。
当自车以当前车速或者期望车速在当前道路上行驶时,如果前方车辆速度过低或存在障碍物时,不同驾驶员会采取不同的操作以降低前方行驶风险。比较保守的驾驶员往往倾向于减速继续保持车道,从而有较大的Qp;激进的驾驶员则会立刻变换车道,继而Qp较小。然而,Qs正相反,激进驾驶员往往接受能力强,Qs较大,后方和周围车辆对其换道的影响较小;保守驾驶员则相反。
图10示出了某次换道过程中行驶风险的变化。自车在开始换道时刻前方的行驶风险为0.124 3,总行驶风险为0.174 6。随着车辆始驶向相邻车道,车辆的行驶风险也继续增加。在3.3 s时,车辆的行驶风险达到最大值0.608 1。随后车辆换到相邻车道,前方行驶风险变成0,总行驶风险也逐渐下降。当车辆换道完成时,车辆的行驶风险为0.005 6。本文中将换道起始时的前方行驶风险作为引发换道的行驶风险,换道过程行驶风险的最大值作为该驾驶员所能接受的行驶风险。即本次换道中,该名驾驶员的Qp=0.124 3,Qs=0.608 1。
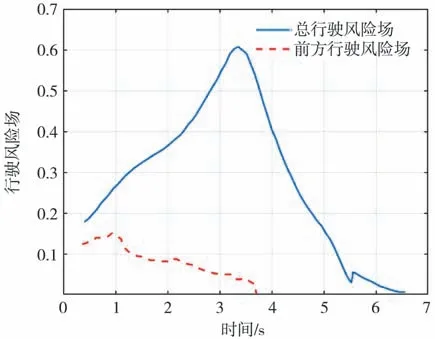
图10 换道过程中的风险
2.4 个性化换道触发方法
图11为采集驾驶员中的3名驾驶员的某段换道工况的Qp和Qs盒形图。明显看出,不同驾驶员可接受的行驶风险有显著差别。从整体分布来看,驾驶员1可忍受的前方风险最低,能接受的行驶风险最高,而驾驶员3则趋于保守,能够忍受前方车辆的风险尽量减少换道,同时对周围环境风险接受程度较低。
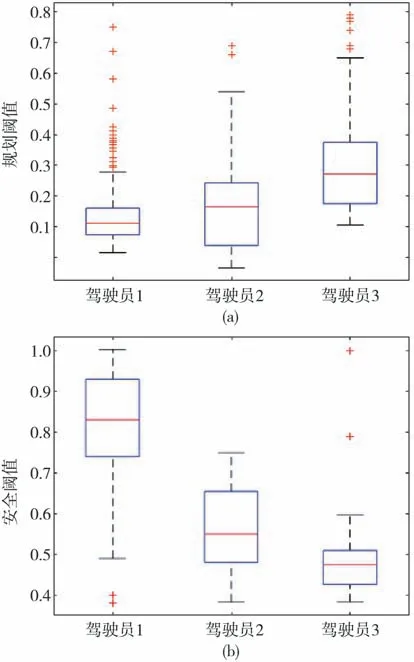
图11 3位驾驶员换道Qp和Qs的对比
因此,本文中选取每位驾驶员在线统计得到的Qp和Qs的中位数作为该名驾驶员的最终阈值,并且该值随换道工况次数的增加而逐渐获得动态更新。车辆能够触发换道轨迹规划系统的条件为

式中:Qfn为自车当前车道前方风险场;Qn为周围环境的总风险场;Qp和Qs为前n-1次换道工况规划和安全阈值的中位数。
3 实车测试结果
本文中选取了15名驾驶员进行了实车验证,本节将选取其中3名驾驶员进行说明。试验开始前,驾驶员对试验车辆先进行一段时间的试驾,以熟悉车辆和试验流程。
将基于交通风险评估的个性化换道触发程序导入Matlab∕Simulink中,通过VECTOR VN1630A实时获取驾驶员的车辆操控数据和角雷达信息,通过程序进行换道工况提取。驾驶员每完成一次换道,就根据雷达信息计算出该次的Qpi和Qsi,在线统计Qp和Qs的中位数,并更新阈值。
在完成自由驾驶后,令每名驾驶员分别完成如图12所示的换道工况。自车以40 km∕h行驶,前车以30 km∕h行驶,两车初始间距为100 m,驾驶员正常驾驶,自由选择时机进行换道。该工况以验证Qp对换道触发的影响(考虑到实车场景的安全性,Qs暂不测试)。
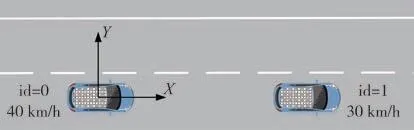
图12 实车验证场景
图13示出基于前方风险场场强曲线和3位驾驶员对应的Qp阈值。从图中可以看出,该试验工况下1-3号驾驶员理论换道时刻分别为11.97、7.24和3.91 s,具有明显的区别。图14为1-3号驾驶员的实际换道过程横向位移的时间历程曲线,从图中横向位移的第1个拐点可以看出,实际1-3号驾驶员的换道触发时刻分别为12.05、6.57和4.31 s,它们很好地符合驾驶员对于风险的接受程度。
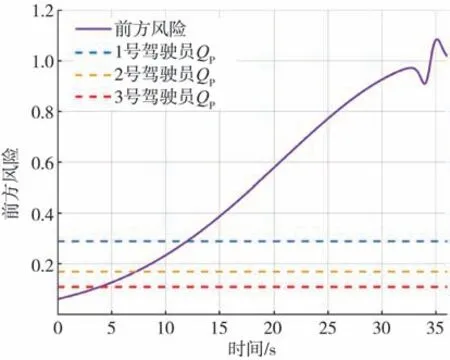
图13 基于前方风险的换道触发
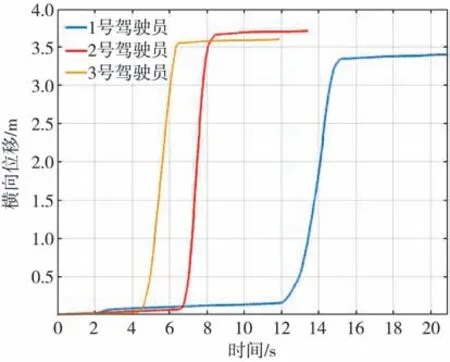
图14 驾驶员的实际换道轨迹
4 结论
为实现个性化的换道触发功能,本文中提出了一种基于人工势场的交通风险评估模型。本文的主要内容和成果如下。
(1)行驶风险场设计
基于人工势场理论,对交通环境中的障碍物,建立了静态和动态风险场,综合考虑了其物理属性和状态参数,实现了自车对环境的风险评估,为换道触发设计的开发提供理论基础。
(2)换道触发设计
数据采集与处理:采集驾驶员日常驾驶的数据,通过车辆的单车模型进行航向估算,从中提取出驾驶员的换道数据工况。
驾驶员换道风险机制分析:定义了驾驶员换道的规划阈值Qp和安全阈值Qs,并据此分析了驾驶员换道过程中的风险变化过程。
个性化换道触发方法:通过对采集的驾驶员换道数据进行统计分析,确定不同驾驶员换道过程中的风险接受程度,从而得出个性化的换挡触发时刻。
(3)实车测试验证
选取典型工况进行了个性化换道触发的实车验证,结果表明:基于交通风险评估的个性化换道触发算法可针对不同驾驶员实现个性化换道触发。
本文中研究了基于交通风险评估的个性化换道触发机理,并完成了实车验证。但仍存在一些有待进一步深入研究和探讨的内容,如:
(1)根据变化无常的环境车辆状态在交通风险建模中融入障碍物意图识别与轨迹预测;
(2)完成个性化的换道轨迹规划设计。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
云南画报(2021年8期)2021-11-13
中学生数理化(高中版.高考理化)(2021年3期)2021-05-21
动漫界·幼教365(中班)(2020年3期)2020-04-20
创新作文(1-2年级)(2019年4期)2019-10-15
阅读(低年级)(2019年4期)2019-05-20
好孩子画报(2019年10期)2019-01-10
魅力中国(2018年5期)2018-07-30
新高考·高一物理(2016年7期)2017-01-23
声屏世界(2015年13期)2015-12-29
