
FMCW毫米波雷达多人呼吸检测方法
2021-09-29 02:24侯凯悦刘泉华
信号处理 2021年9期
任 伟 侯凯悦 王 刚 刘泉华
(1. 北京理工大学信息与电子学院雷达技术研究所, 北京 100081; 2. 卫星导航电子信息技术教育部 重点实验室 (北京理工大学), 北京 100081; 3. 北京理工大学重庆创新中心, 重庆 401135)
1 引言
基于雷达的人体呼吸心跳检测对于医疗监护、火灾和地震等灾后救援、家居健康监测具有重要意义[1-5]。雷达测量人体呼吸心跳的原理为:呼吸和心跳等人体活动会引起胸腔的起伏,进而引起雷达与被测人体之间的径向距离的变化。通过测量该径向距离的变化,可提取人体呼吸心跳信号。
到目前为止,大多数研究针对单目标,少部分研究针对多目标。相比于单目标呼吸心跳检测,多目标呼吸心跳检测的难点在于多目标的区分。根据多目标区分域的不同,当前研究可分为三类:距离维区分方法[6-7]、方位向区分方法[8]、信号域区分方法[9-10]。距离维多目标区分方法是根据目标径向距离不同进行区分,是最直接最常见的方法,该方法的优势为多目标信号分离结果好,信号处理流程较为简单。劣势在于为了获得较高的距离分辨率,对雷达系统带宽要求较高;当多目标位于同一距离单元时,无法进行区分。方位向多目标区分方法是根据目标相对雷达方位角不同进行区分。该方法的优势是可区分同一距离单元的多目标,但要求雷达使用阵列天线,并且需要研究相应的波达方向(DOA, Direction of Arrival)估计方法和数字波束形成(DBF,Digital Beamforming)方法。信号域多目标区分方法是根据多目标呼吸心跳信号的差异性进行区分。该方法的优势是可区分同一距离单元同一方位角的多目标,但要求多目标呼吸心跳信号具有较为明显的差异,且要求多目标在同一距离单元处。
截止目前,多个人体目标共线情况下的多人呼吸检测仍是一个挑战。毫米波雷达工作频率在30 GHz到300 GHz之间;带宽较宽,可达数GHz,因而具有更高的距离分辨率。以雷达带宽为3 GHz为例,则其距离分辨率为5 cm。高距离分辨率使得在距离维对多目标进行区分成为一种可行的方案。以家居环境为例,多人呼吸监测的两个难点是:1)当两/多个人体目标与雷达处在同一直线时,雷达只能测得距离最近的人体目标的胸腔起伏信息;2)背景杂波干扰。在家居环境中,存在诸多体积较大(大RCS(Range Cross Section))的物体,掩盖了人体胸腔回波信号。为解决上述两个关键问题,本文提出了一种新的雷达布置方案,并结合多种人体目标与静止杂波区分方法,成功实现了多个人体目标的呼吸信号检测。
2 FMCW信号模型
调频连续波(FMCW, Frequency Modulated Continuous Wave)雷达同时具有测距的功能和高信噪比(SNR, Signal-to-Noise Ratio)的特性。本文中提到的FMCW信号均为目前最常用的线性调制FMCW信号。
设雷达发射信号为
(1)
其中,At为发射信号幅度,fc为信号载频,B为信号带宽,T为脉冲重复周期。
设共有M个静止人体目标(人体躯干静止,但正常呼吸),第m个目标与雷达的径向距离为Rm,m=1,2,…,M。 雷达接收信号可以表示成
(2)
其中,τm=2Rm/c,m=1,2,…,M。对接收的回波进行去斜处理,即将接收信号与参考信号相乘,并通过低通滤波器,得到的同相支路的中频信号为
(3)
相应的复信号为

(4)
公式(4)的傅里叶变换为
(5)


(6)
M个目标在距离维可分可推导出公式(7),因此,上式的近似成立。
sinc(πB(τi-τm))≪1,i≠m,i=1,2,…,M,m=1,2,…,M
(7)
对于第m个目标,K帧的数据可表示成(忽略其幅值)
(8)
对应的相位值为
(9)
其中,arg(·)表示求相位函数,λ=c/fc为信号波长。gm即为第m个目标的胸腔起伏运动。
此外,假设呼吸引起的胸腔起伏运动可由正弦信号表示,即
rr(t)=Arsin(2πfrt)
(10)
3 信号处理方法
毫米波雷达的高带宽特性使得在距离维分辨多个人体目标的方法可行。如图1所示,为解决多目标彼此遮挡的问题,我们将毫米波雷达布置在高处。以两个人体目标为例,利用两目标到雷达的径向距离不同,在距离维上对两目标进行区分,进而提取各自的胸腔起伏信息,即呼吸信号。
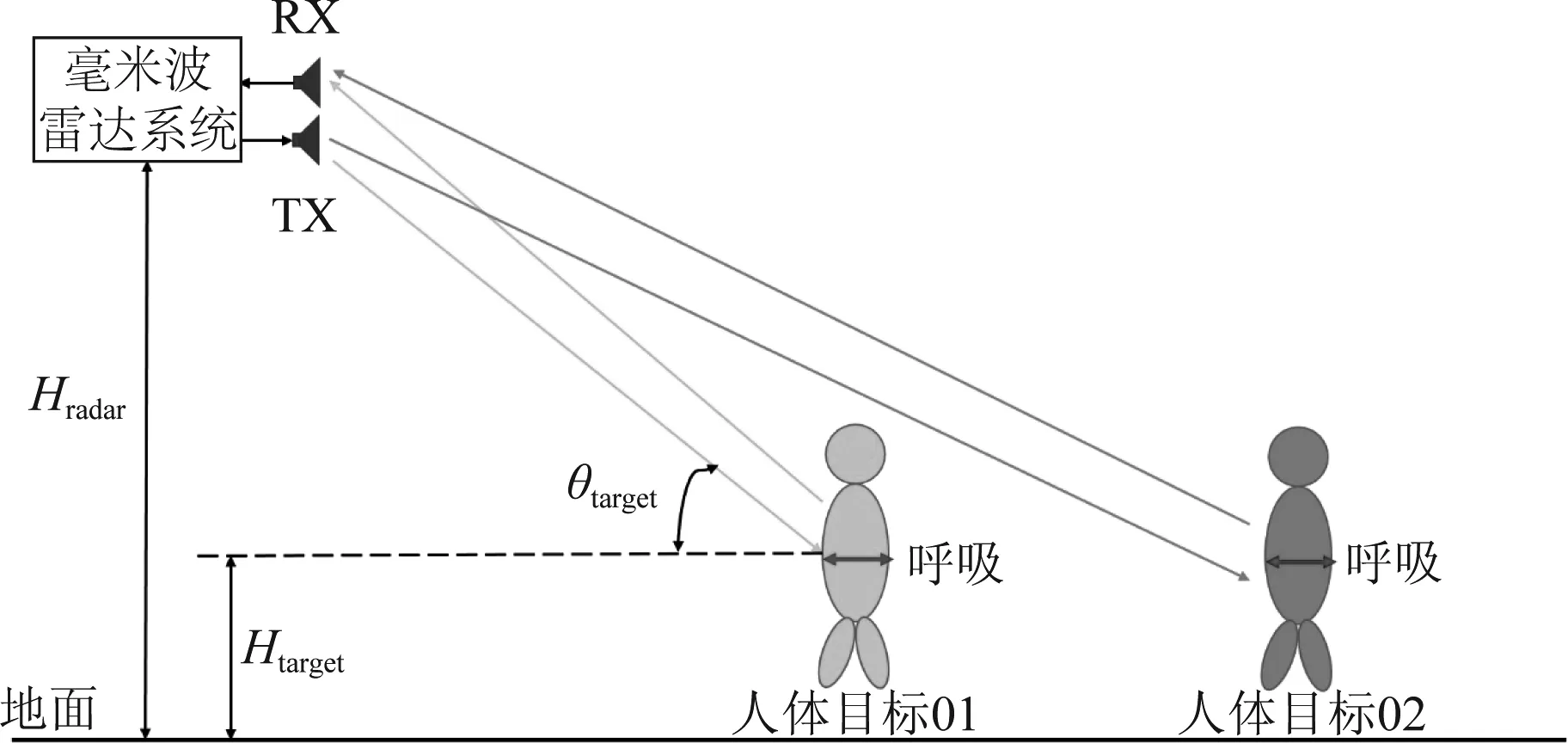
图1 毫米波雷达多人呼吸探测场景:Hradar为雷达与 地面垂直高度,Htarget为人体目标胸腔与地面垂直高度, θtarget为人体目标胸腔所在位置对应的俯仰角Fig.1 Scenario of respiration detection for multiple subjects using mmWave radar. Hradar is the vertical height of the mmWave radar, Htarget is the vertical height of human subjects, and θtarget is the elevation angle corresponding to the human chest walls
FMCW毫米波雷达多人呼吸检测信号处理流程如图2所示。各模块详细介绍如下。

图2 毫米波雷达多人呼吸检测信号处理流程Fig.2 Flow Chart of respiration detection for multiple subjects using mmWave radar
ADC数据和去斜处理。去斜处理操作如式(3)所示,去斜后得到式(4)中的信号。
静止杂波对消。人体目标所处环境中(如家居环境)可能存在体积较大的静止物体,为消除这些静止物体所产生的杂波回波(统称为背景杂波),避免其影响人体目标呼吸信号的检测,需要进行静止杂波对消。将同时包含目标和背景的去斜信号(sif(t))target+clutter与只包含背景的去斜信号(sif(t))clutter作差,得到只包含目标的去斜信号。需要指出的是,静止杂波对消处理,可以在去斜处理之前,去斜处理与距离维FFT之间,或者距离维FFT之后,只需要在恒虚警检测之前即可。这是由于去斜处理、静止杂波对消、距离维FFT均为线性处理。
距离维FFT。对去斜后的信号sif(t)做FFT,即可得到包含目标信息的一维距离像Sif(f)。
恒虚警检测。对得到的一维距离像Sif(f)进行恒虚警检测,确定人体目标和强杂波所在距离单元[11]。随后,对过恒虚警检测门限的M个目标逐一进行处理。注意,虽然在恒虚警检测前进行了静止杂波对消处理,但在实际中并无法完全消除静止杂波。

带通滤波。为进一步消除静止杂波和其他信号(如心跳信号)的影响,对信号gm进行带通滤波处理。带通滤波器的通带频率为0.15 Hz~0.50 Hz,即9 bpm~30 bpm。
FFT。对带通滤波后的信号进行FFT处理,得到第m个目标或强杂波的运动频率。
人体目标胸腔信号判定。在距离维FFT后,进行恒虚警检测,可以检测出M个峰值,然后对这M个峰值目标逐个处理。这M个峰值目标为人体目标或静止背景杂波。对于第m个峰值目标,经过慢时间相位及解模糊处理后可以得到该目标的慢时间相位信号。若该慢时间相位信号同时满足如下两个条件,即可判断其为人体目标:
1)信号主频率在0.15 Hz~0.50 Hz之间,即9 bpm~30 bpm;
4 实验结果及讨论分析
4.1 实验场景及参数
本实验采用的FMCW毫米波雷达为德州仪器公司的AWR1642开发板和DCA1000高速数据采集卡,雷达工作频谱为77 GHz至81 GHz。两个发射天线和四个接收天线。实验参数如表1所示。
实验场景如图3所示。本实验利用单部雷达探测两个处于不同径向距离的人体目标的呼吸信号。实验中将单部毫米波雷达置于高处,两个人体目标正对雷达且位于不同径向距离处。雷达与地面垂直高度Hradar为1.5 m,人体胸腔与地面垂直高度Htarget为0.85 m,两目标与雷达径向距离分别为1.2 m和2.3 m。

图3 毫米波雷达多人呼吸检测实验场景Fig.3 Respiration detection of multiple subjects using mmWave radar
实验中,为验证毫米波雷达测量结果的准确性,我们采用合肥华科电子技术研究所的HKH-11C呼吸波传感器测量的结果作为参考信号。
4.2 实验结果及讨论
1)静止杂波对消
图4对比了有无静止杂波对消处理的一维距离像。实验结果表明,该方法可以较完整保留目标信号,并同时很好地抑制静止杂波。
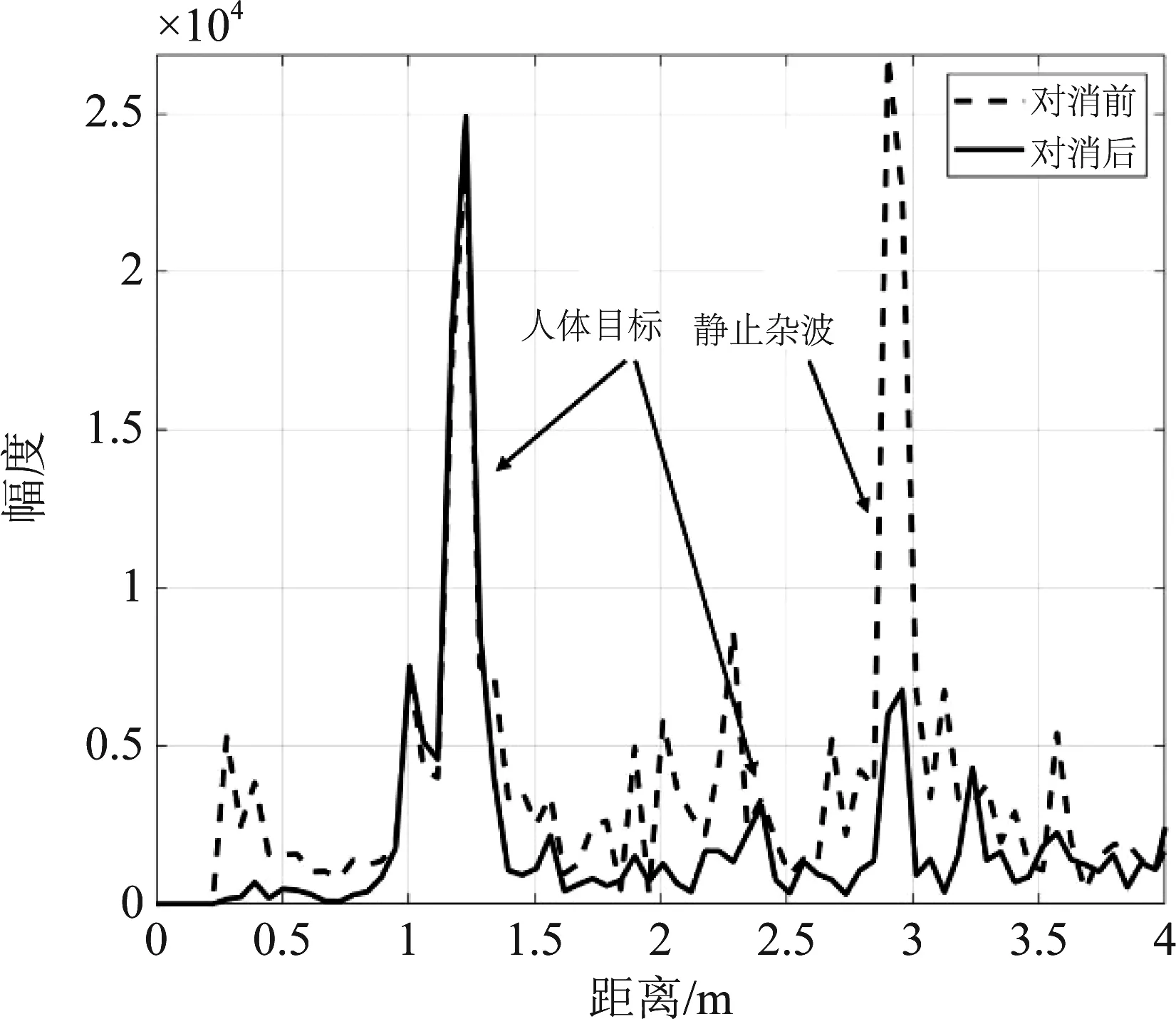
图4 静止杂波对消效果图Fig.4 Results of stationary clutter cancellation
2)解模糊后的慢时间相位信号

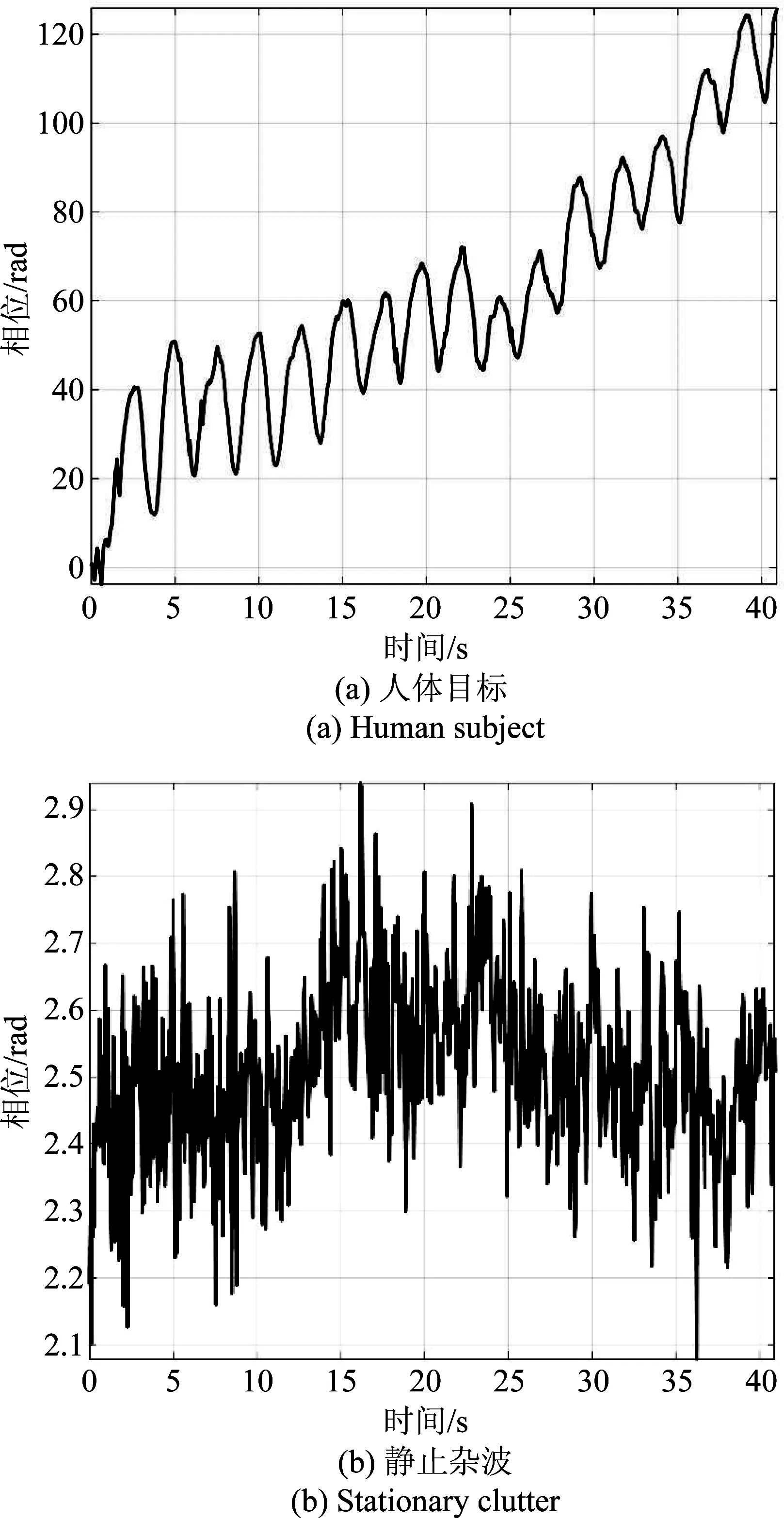
图5 解模糊后的慢时间相位信号 (注意两图纵坐标范围不同)Fig.5 Slow-time phase signals after unwrapping (Note that the Y-axis range of the two figures is different)
此外,从图5(a)中可以看出,对于单次呼吸,人体目标胸腔起伏大致在20 rad到30 rad之间,即6.2 mm到9.3 mm之间。信号整体的平移是由于人体目标在探测过程中存在微小的移动。从图5(b)中可以看出,静止杂波并不是完全静止的。静止杂波信号的标准差σ杂波=0.126 rad,即3.91×10-5m。这也与图4的静止杂波对消结果相一致:静止杂波并没有完全对消,仍有部分残留。
3)人体目标呼吸信号
图6和图7分别为人体目标1和目标2的呼吸信号检测结果。采用FMCW毫米波雷达的检测结果分别为0.41 Hz(目标1)和0.27 Hz(目标2),接触式传感器HKH-11C测得的参考结果分别为0.43 Hz(目标1)和0.27 Hz(目标2)。实验结果表明,该方案可以准确地提取不同距离的两个人体目标的呼吸频率。
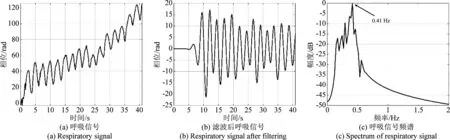
图6 呼吸信号检测结果(人体目标1)Fig.6 Results of respiratory signals (Human subject No.1)

图7 呼吸信号检测结果(人体目标2)Fig.7 Results of respiratory signals (Human subject No.2)
5 雷达空间检测盲区分析
本节分析了雷达空间检测盲区的两个影响因素:雷达数量和(多部)雷达空间构型。最终得出结论:最少需要三部雷达,可完全消除雷达空间检测盲区。当布置的三部雷达不共线时,不存在雷达空间检测盲区。
首先,对本文所讨论的“雷达空间检测盲区”进行定义。本文所讨论的雷达空间检测盲区可分为两类:“空间同距盲区”和“大俯仰角盲区”。下面对这两类盲区进行详细解释。

图8 不同雷达空间配置方案下的盲区分析:单部雷达、两部雷达、共线三部雷达、不共线三部雷达Fig.8 Blind areas under different spatial deployment schemes of mmWave radars:One radar, Two radar, Collinear three radars, Non-collinear three radars
(11)

(12)

接下来,我们分析不同雷达数量和雷达空间构型条件下的雷达空间检测盲区。需要指出的两点:
1)对于两/多部雷达,所有雷达空间检测盲区重叠部分才是真正的盲区。
2)假设不同雷达在空间上相隔足够远,以使得其大俯仰角盲区不重叠。
基于上述两点,对于L部雷达,其雷达空间检测盲区即为L部雷达空间同距盲区的交集,即
(13)
图8绘出了四种雷达配置方案下的雷达空间检测盲区分析:单部雷达、两部雷达、共线三部雷达、不共线三部雷达。
单部雷达的空间检测盲区Ω为以雷达1投影y1为中心的圆面和两/多个目标所在的圆,如图8(a)所示,即

(14)
两部雷达的空间检测盲区为分别以雷达1和雷达2 的投影y1和y2为圆心的圆的交点,如图8(b)所示,即
Ω=Ω1∩Ω2={x∈R2|||x-yi||2=Ci,i=1,2}
(15)
其中,Ci,i=1,2为任一正实数。
三部共线雷达的空间检测盲区为分别以雷达1、雷达2、和雷达3的投影y1、y2和y3(y1、y2和y3共线)为圆心的圆的交点,如图8(c)所示,即
Ω=Ω1∩Ω2∩Ω3={x∈R2|||x-yi||2=Ci,i=1,2,3,|(y2-y1)·(y3-y1)|= ||y2-y1||2||y3-y1||2}
(16)
其中,C3为任一实数,|·|表示绝对值,·表示内积。
三部不共线雷达不存在空间检测盲区,如图8(d)所示,即
Ω=Ω1∩Ω2∩Ω3={x∈R2|||x-yi||2=Ci,i=1,2,3,|(y2-y1)·(y3-y1)|≠ ||y2-y1||2||y3-y1||2}=Ø
(17)
6 结论
为实现雷达与多目标共线情况下的多人呼吸信号检测,本文提出一种新的雷达空间布置方案,并结合多种手段对消静止杂波和辨别人体目标和静止杂波。本文通过实验验证了所提方案的可行性和有效性。此外,本文详细讨论了不同雷达数量和空间布置方案下的雷达空间检测盲区,并首次论证了三部不共线可完全消除空间检测盲区。在后续研究中,为进一步降低所用雷达数量,消除雷达空间同距盲区,可以根据不同人体目标呼吸信号的差异性,结合独立成分分析等盲源分离方法,从而实现利用两部雷达完全消除盲区。
猜你喜欢
中学生数理化·八年级物理人教版(2023年3期)2023-03-21
趣味(数学)(2022年4期)2022-07-02
科学与信息化(2021年30期)2021-12-24
铁道通信信号(2018年12期)2019-01-31
中学生数理化·八年级物理人教版(2017年6期)2017-11-09
资源再生(2017年4期)2017-06-15
百科探秘·航空航天(2016年5期)2016-11-07
西北工业大学学报(2015年3期)2015-12-14
中国卫生(2015年5期)2015-11-08
遥测遥控(2015年2期)2015-04-23
