考虑车辆横向主动安全的智能驾驶员模型
2021-09-28 07:20田彦涛
自动化学报 2021年8期
隋 振 梁 硕 ,2 田彦涛 ,3
驾驶员模型本质上即智能车辆的自动驾驶控制器,自动完成车辆在特定驾驶任务下的速度控制与转向.通常根据车辆运动的维度,驾驶员模型可以大致分为纵向驾驶员模型、横向驾驶员模型与复合驾驶员模型[1].现如今最优控制理论、自适应控制理论与模型预测控制(Model predictive control,MPC)理论已成为当前驾驶员建模的主流方法.如Yoshida 等[2]采取自适应控制理论建立驾驶员模型.Qu 等[3-4]提出了基于随机模型预测控制的驾驶员建模方法.Falcone 等[5]则利用线性时变模型预测控制算法建立了自动驾驶车辆的转向控制器,也可认为是横向驾驶员模型.Du 等[6]利用非线性模型预测控制(Nonlinear model predictive control,NMPC)实现车辆速度和转向的综合控制.未来随着人工智能技术的推进,基于机器学习技术在特定驾驶任务条件下建立驾驶员模型也逐渐引起了人们的重视.如Amsalu 等[7]利用支持向量机对驾驶员在十字路口处的驾驶行为进行了分析与建模,对驾驶员在十字路口的行为进行准确的预测,并用于指导实际驾驶行为.
在智能驾驶员模型飞速发展的同时,车辆的主动安全也逐渐引起了人们的重视[8].车辆的横向运动过程中主要面对的安全威胁包括:1)在车辆转向过程中,由于车辆系统的非线性和耦合性使其在高速、弯道或者在湿滑路面下极容易发生侧滑、侧翻、车道偏离等危险.2)在复杂交通环境中,因对交通场景中环境态势分析的不足,导致和其他交通车辆发生碰撞事故.
本文研究的智能驾驶员模型主要解决两方面问题:1)针对高速、低路面附着系数以及转弯工况下,通过设计模型预测控制器作为车辆转向控制器并考虑车辆的侧向加速度、横摆角速度、质心侧偏角和横向转移率等现实约束,实现智能车辆在跟踪轨迹的同时提高侧向稳定.这里所指的侧向稳定性即车辆在行驶过程中,不发生侧滑或侧翻的极限性能,提高侧向稳定性即减小车辆发生侧滑、侧翻的风险.2)在直线多车道的道路条件下,通过分析一般工况下车辆换道行驶条件,采用线性模型预测理论设计速度调整控制算法,采用粒子群算法结合贝塞尔曲线设计轨迹发生器,辅助智能车安全的实现自动换道的驾驶任务,即在换道过程中不与环境车辆发生任意形式的碰撞.
1 智能驾驶员模型结构
人类驾驶车辆的本质,从控制系统的角度出发,可看做是人—车—路环境构成的闭环系统.人类驾驶员通过分析交通环境,通过大脑制定出车辆应行驶的速度和轨迹,并驱动方向盘和踏板执行相应的驾驶任务.这一系列流程可概括为驾驶员的感知、决策和执行.介于驾驶员具有以上特征,本文设计的在换道条件下的驾驶员模型结构如图1 所示.
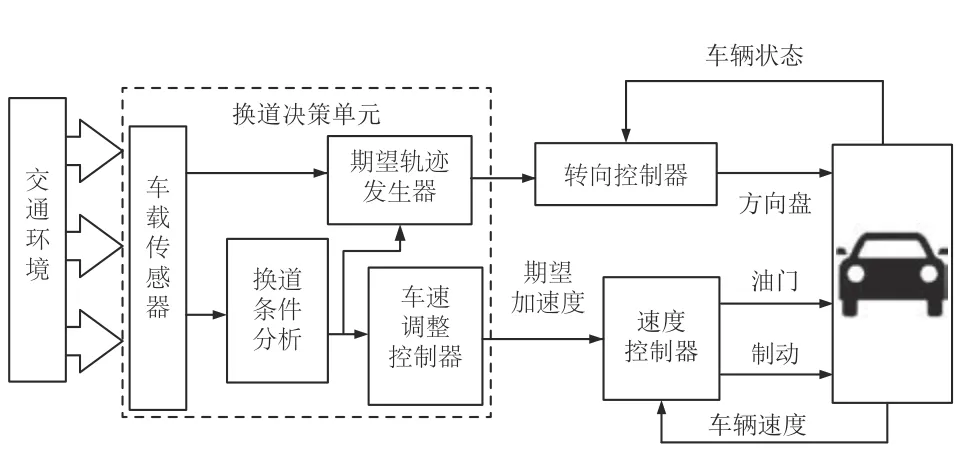
图1 驾驶员模型结构Fig.1 The structure of the driver model
在该结构中,驾驶员模型可划分为换道决策单元、转向控制器模块和速度控制器用来实现换道任务.换道决策单元将结合具体车道环境,合理分析换道条件、规划期望行驶的轨迹和车速避免事故的发生.期望轨迹和车速信号作用于下游的转向控制器和速度控制器完成具体的转向和速度操控.其中,本方案中的速度控制器根据现有成果,采用模糊神经网络算法计算指定工况下油门开度和制动压强实现对汽车加速度的控制[9].而转向控制器的设计,保证轨迹跟踪精度的同时必须兼顾车辆自身的侧向稳定性.这里所说的侧向稳定性指标包括质心侧偏角、横摆角速度、侧向加速度和横向转移率.因此,转向控制器的设计本质上是以轨迹跟踪精度为控制目标,以方向盘转角为控制量,同时兼顾汽车质心侧偏角、横摆角速度、侧向加速度和横向转移率等稳定性约束的,具有多目标多约束的最优控制求解问题[10].下面将分别就本驾驶员模型中的转向控制器以及决策规划模块的详细内容进行说明.
2 转向控制器设计
2.1 车辆动力学模型
利用模型预测控制理论进行转向控制器的设计,需要对被控对象进行清晰准确的描述.本文选取两轮三自由度的非线性车辆动力学模型作为转向控制器设计的依据.假设车辆在行驶过程中前轮转角与方向盘转角之间的传动比为线性关系,且两个前轮的转向角度一致.同时忽略车辆垂直与俯仰运动,忽略空气动力学、侧向风与轮胎回正力矩对车身的作用.模型结构如图2 所示.

图2 简化3 自由度车辆动力学模型Fig.2 The model of the vehicle of 3DOF
通过对车辆模型的纵向、侧向、横摆和侧倾运动的受力分析,可以推导出其动力学方程为

图2 中的各个参数分别表示如下:ax为车辆的纵向加速度 (m/s2);ay为车辆的侧向加速度 (m/s2);ψ为车辆横摆角 (rad);r为车辆的横摆角速度 (rad/s);δ是汽车前轮转角 (rad),其与方向盘转角δsw之间的线性系数G;m是车辆的整体质量 (kg);Iz代表车辆z轴的转动惯量 (kg/m2).a和b分别为质心到车轮前后轴的轴距 (m).通常,ax=,ay=和vy是车相对自身纵轴和横轴的速度(m/s). 轮胎所受的纵向力Fxi与侧向力Fyi(N) 由路面提供,通常在滑移率和轮胎侧偏角较小的情况下,其可近似为

式中,i=f,r.Ki与Ci分别为轮胎的纵向刚度与侧向刚度 (N/m),Si为轮胎滑移率,是一无量纲参数,通常在车辆匀速行驶中可近似为一个定值,本文定义为 0.2. 轮胎侧偏角αi(rad) 则满足

此外,车辆在运动过程中,车辆在大地坐标系下的位移可表示为

式中,X与Y分别为车辆相对于地面的纵向与侧向位移 (m).在转向控制器的设计中,通常需要将复杂的车辆动力学方程简化.实际转向中车辆前轮转角δ满足 c osδ ≈1,s inδ ≈δ.因此,车辆系统状态空间表达式[11]为

定义系统状态变量ξ为:vy,vx,ψ,r,Y,X.定义前轮转角δ为控制量u.车辆的侧向位移与巡航角为系统的被控变量η,因此上述连续控制系统的状态空间方程可以表示为

式中,矩阵h为系统输出矩阵.
衡量车辆侧倾稳定性的性能指标通常取车辆横向转移率(Lateral transfer rate,LTR),其原理如图3 所示.图中的各个参数分别为:g代表重力加速度 (m/s2),φ是车辆的侧倾角度 (rad),ms是车辆簧载质量 (kg),Ix是车辆x轴的转动惯量 (kg/m2).h为侧倾臂长 (m),H代表簧载质心距离地面的高度 (m),T表示车辆宽度 (m).其大小与车辆侧向加速度、侧倾角、侧倾角加速度相关,指标形式如下[12]:
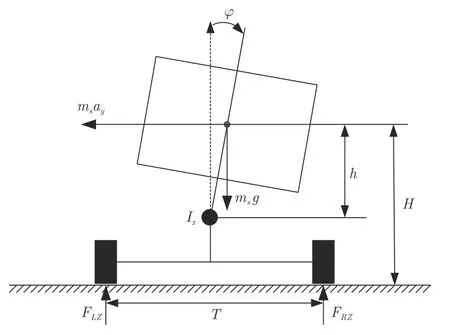
图3 车辆侧倾动力学模型Fig.3 The roll dynamic model of the vehicle

2.2 转向控制系统设计
本文中,转向控制器设计采用线性时变模型预测控制理论,该控制器需要对预测模型、目标函数和约束条件进行设计[13].连续系统的状态空间表达式,经线性化、离散化和增量化后的结果为

其中,I为单位矩阵,其他各个符号的含义为
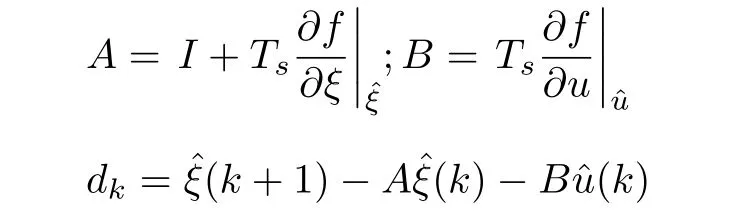
上述各式中,Ts定义为离散系统采样时间,和为当前系统的状态量和控制量.
由于转向控制系统的主要控制目标是保证轨迹跟踪精度并同时兼顾车辆的侧向稳定性.因此本文将其转化为轨迹控制精度的性能指标以及对车辆主要状态的约束的形式.系统的主要侧向约束指标包括质心侧偏角、横摆角速度、侧向加速度和横向转移率,其具体形式为

考虑车辆系统的实际运动极限,转向控制系统输出量、控制增量和控制量也应满足约束

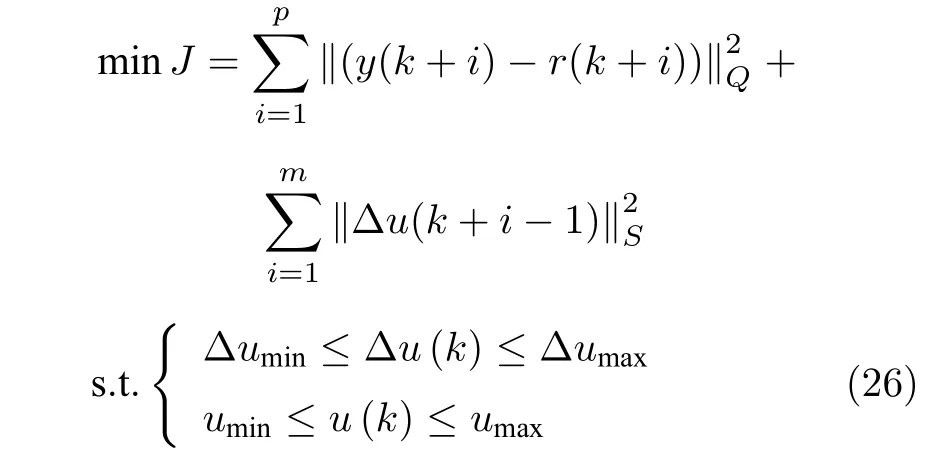
式中,εi为各个约束变量的松弛因子,用于保证系统存在可行解.为提高系统控制精度,减小执行机构的运动幅度,定义系统的性能指标为

式中,Np为预测模型的预测时域,Nc为预测模型的控制时域,ηref为期望输出的侧向轨迹.Q,R和ρ代表相应的权重系数.根据滚动优化理论,系统状态方程在预测时域和控制时域内不断迭代后得到的系统预测模型,结合性能指标与约束条件,经二次规划算法可计算出最优控制序列

根据方向盘与前轮转角的比例系数G,可计算出方向盘转角的最优解为

3 换道决策系统设计
当车辆前方出现妨碍自身正常行驶的车辆或障碍物时,为了提高驾驶效率,人类驾驶员会通过变换车道的方式实现更好的驾驶体验[14].假设换道开始前交通车分布如图4 所示.

图4 换道前车辆分布情况Fig.4 Distribution of the vehicles before lane change
在换道行驶过程中,智能车M 会因转向不足或安全间距过小导致和原车道前车(Lead vehicle of the original lane,Lo)发生追尾或斜向剐蹭.或因车速调整不当或安全间距不足导致和目标车道的前车(Lead vehicle of the destined lane,Ld)和后车(Follow vehicle of the destined lane,Fd)发生追尾或剐蹭.因此,针对目标车道的换道行为,本文将结合目标车道前后车的间距和速度情况做出分析,计算出合理的行驶车速和跟车间距.为避免因转向不足导致的与原车道前车相撞,本驾驶员模型将结合前后两车的间距及其换道方向,规划换道路径.
3.1 换道车辆安全性分析
根据图4 中换道前车辆分布,设t0为换道开始时刻,ΔDLo,ΔDLd,和ΔDFd分别为智能车M与原车道前车、目标车道前车和后车的当前间距.dLs为车辆M与前车的期望安全间距,dFs为车辆M与后车的期望安全间距.vi为环境中各车车速(i=M,Lo,Ld,Fd).假设换道前后目标车道车辆的位置关系如图5 所示.

图5 换道后车辆分布情况Fig.5 Distribution of the vehicles after lane change
图中虚线代表换道前各个车辆所处的位置,实线为换道结束后各车辆对应的位置,Si为各车在换道期间行驶的路程.通常为使换道结束后前后两车的车距仍处在驾驶员期望安全间距之外,车辆行驶过程应满足

前车安全间距dLs通常根据前后两车车速vM与vL、路面附着系数 Φ 重力加速度g和与车间最小安全间距d0来确定,其不同环境下的大小为[15]

上式中d0的定义参阅文献[15],其形式为

式中,c和d为 一常量,在本文中定义c=1.8,d=0.17.k为反映驾驶员实际意图的系数.
假设车辆M的加速度为a,通常情况下,车辆M当前所处的车流中各车车速可大致划分为:
工况1.vM>vLd>vFd,此时目标车道车速低于自车车速,智能车M向目标车道减速换道行驶.
工况2.vLd>vFd>vM,此时智能车M为了不与目标车道后车发生剐蹭,需加速换道.
工况3.vLd>vM>vFd,此时智能车M可以匀速或加速向目标车道换道行驶.
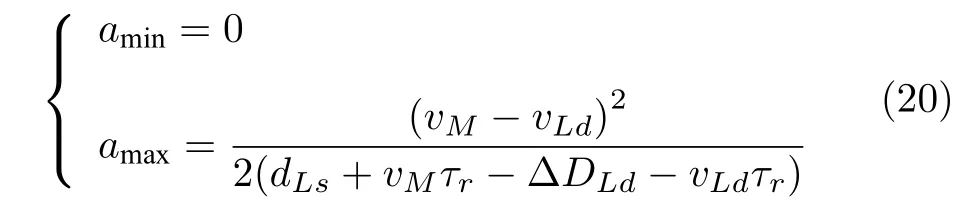
定义驾驶员反应时间为τr.根据式(14) 以及牛顿运动学公式分别计算出智能车M在以上3 种情况下换道过程中采取的加速度上下限,即amin与amax.
工况1 中,当ΔDLd<dLs时,此时由于Ld车速慢于本车,且两车间距已经小于安全间距,换道会增大两车相撞风险,所以此工况下不做换道操作.相反,若车间距关系满足ΔDLd≥dLs,根据式(14)可计算出车辆M的加速度上下限为

在工况2 中,若此时换道时若车间距条件满足ΔDFd<dFs,由于目标车道后车车速较快且两车距离已经小于二者的安全间距,因此不做换道.相反,若ΔDFd≥dFs且ΔDLd<dLs,则

若ΔDFd≥dFs且ΔDLd≥dLs,此时目标车道前车车速快于本车且两车间距已大于安全间距,则车辆M拟采取的加速度范围为

在工况3 中,由于此时目标车道后车慢于自车车速,因此智能车M无需考虑与其发生碰撞,只考虑与前车的安全间距.若ΔDLd<dLs,加速度范围满足:
相反,若满足ΔDLd≥dLs,加速度范围为

通常人类驾驶车辆过程中,车辆实际行驶的极限加速度范围为:a∈[asmin,asmax],此处asmin与asmax是在保证车辆与驾驶员的舒适与稳定条件下加速度最小值与最大值.将前文所述的安全换道加速范围与舒适性范围取交集,即为本文设计驾驶员换道模型应采取的加速范围,当分析模块计算出此范围为非空集合时,代表当前工况下换道存在可行性,即车速调整模块实际采取的加速区间为

3.2 车速调整控制系统设计
通常,驾驶员在驶入与Lo的安全间距之内,首先要根据Lo的运动状态调整两车的间距和速度关系,并同时判断目标车道是否存在换道空间,当换道空间达成后以目标车道前车为跟车对象进行车速和轨迹的调整.因此在本驾驶员模型车速调整控制中,将以前后两车的运动关系为被控对象进行调整.在实际车辆行驶过程中,前后两车间距ΔD、速度差vr、前后车车速vL与vM,前后车加速度aL和aM,后车期望加速度aMd之间满足

将上式转换为状态空间表达式形式,定义状态量x=[ΔD vr vM aM]T,控制量u=aMd,扰动量d=aL,系统输出y=[ΔD vr]T,上述方程可表示为

取采样周期T,取增量式进行算法设计,因此系统离散化后结果为

其中,Ad=I+TA,Bdu=TBu,Bdi=TBi,Cd=C.同样采用滚动优化思想,对状态方程在预测时域p和控制时域m内迭代出系统的预测方程.为了满足所要达到的控制目标,定义控制器的参考输入r(k+i)=[Ddes(k)0]T,其中Ddes(k)此处定义为期望安全间距dls,期望两车速度差vr为0.速度控制系统的性能指标与控制量约束为
式中,Q和S代表输出量与控制增量序列的权重矩阵.同样利用二次规划算法计算出期望加速度的最优解
3.3 期望轨迹发生器的设计
为避免因转向不足导致和前车Lo的斜向剐蹭,本驾驶员模型采用基于粒子群的贝塞尔曲线实施轨迹规划.通常n次贝塞尔曲线可表示为

其中,Pi为曲线的关键点坐标.在轨迹规划中,轨迹规划的关键点的选取方式如图6 所示.
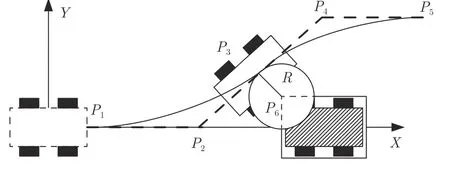
图6 轨迹规划原理Fig.6 The principle of trajectory planing
图6 显示了自车在换道开始前两车的位置关系.设两车当前间距为ΔDLo.以实施左换道为例,定义各个主要关键点的位置为:实验车M的车头中心坐标P1(x1,y1),前车左后点P6(x6,y6).根据车辆轨迹的曲线特性,在轨迹中距离前车P6点最近的一点必为该轨迹切点P3(x3,y3). 定义两点间的距离为R,R也可看做是轨迹与前车间的最小距离.P3同时也是以P6为圆心的圆的外切点.那么将P3切线与两侧车道中心线的交点定义为P3(x3,y3) 和P4(x4,y4).而目标车道上位于P4前方的任意一点被定义为P5(x5,y5).
因此,根据参考轨迹初步设置的5 个关键点,故可采用四次贝塞尔曲线来实现轨迹规划.为使该参考轨迹更加平滑、均匀[16],易于跟踪,因此本文选取优化性能指标为

式中,ρ(x) 与为贝塞尔曲线的曲率及其导数,B(x)与S(x) 分别为贝塞尔曲线函数和结构线函数,θ为过P3点的切线与x轴的夹角.而ωi为各个性能指标的权系数.为使性能指标尽快达到最优结果,本文最终采用粒子群算法求解各个主要关键点的最优坐标,最后根据贝塞尔曲线公式,得出车辆换道过程的参考轨迹

4 智能驾驶系统实验验证
本智能驾驶员模型将在CarSim/Simulink 仿真环境下,分别就车辆在轨迹跟踪以及自主换道两种交通场景进行实验验证.实验车辆为CarSim 2016 中的D-Class 型轿车.
4.1 智能车轨迹跟踪与侧向稳定性验证
为验证本模型转向控制算法的可靠性,本文分别对该驾驶员模型在高速、低路面附着系数以及弯道三种工况下驾驶员模型转向控制器进行验证.分别对无约束模型预测控制器和本文采用的带约束模型预测控制器的控制效果进行对比说明.
工况1.高速双移线工况.
此工况定义车速25 m/s,路面附着系数为0.9,装备不同转向控制算法的智能车辆行驶轨迹和主要系统状态如图7 所示.

图7 工况1 条件下车辆行驶状态Fig.7 The states of the vehicle on work Condition 1
工况2.低路面附着系数双移线工况.
此工况定义车速25 m/s,路面附着系数为0.5,装备不同转向控制算法的智能车辆行驶轨迹和主要系统状态如图8 所示.

图8 工况2 条件下车辆行驶状态Fig.8 The states of the vehicle on work Condition 2
工况3.弯道路况.
此工况下,定义车速14 m/s,路面附着系数为0.9,弯道曲率0.25.装备不同转向控制算法的智能车辆行驶轨迹和主要系统状态如图9 所示.

图9 工况3 条件下车辆行驶状态Fig.9 The states of the vehicle on work Condition 3
根据实验结果,在工况1 条件下,无约束MPC在25 m/s 车速下轨迹跟踪的能力较差,其在变道过程中产生了震荡.这是因为高速行驶中车辆的侧向加速度与质心侧偏角的变化幅度大,且不受任何约束限制,导致车辆在行车过程中发生了失稳现象.而带约束MPC 由于质心侧偏角、横摆角速度、侧向加速度和横向转移率受弹性约束,因此其变化幅度更小,更加平稳,因而其在轨迹跟踪上的效果更好.
在工况2 条件下,定义车速依然保持25 m/s 不变,而路面附着系数减小至0.5 时,无约束MPC 控制的智能车辆的轨迹跟踪效果愈发的变差,其控制的车辆完全偏离了期望跟随的目标车道.而车辆质心侧偏角、横摆角速度和侧向加速度也发生了大幅摆动,稳定性变差,而横向转移率也在某些时刻超过了1 的极限值,说明此时车辆有很严重的侧翻风险.而带约束MPC 控制的车辆尽管也偏离了原车道,但很快恢复至正常轨迹中,且其侧向稳定性更好.
工况3 的结果显示,带约束MPC 控制的车辆较好地跟随了弯道路径,而无约束MPC 控制的实验车在弯道后半程由于弯道曲率方向的改变,其偏离了期望轨迹,质心侧偏角、横摆角速度、侧向加速度和横向转移率的幅度加大,其发生侧倾、侧滑等风险更高.
4.2 智能车自主换道实验验证
本节验证驾驶员模型在换道场景下的安全性、可靠性和有效性[17],检验当前交通环境下车辆换道行驶前后的侧向轨迹、车速变化情况以及实验车与各交通车之间的安全车距.安全车距即智能车在行驶过程中,与环境中其他各个车辆的等效外接矩形的直线最短距离.其效果如图10 所示.

图10 安全车距定义Fig.10 The definition of the vehicles safety distance
本文通过设置不同的安全间距、加速度及其增量范围和系统的反应时间来体现出智能车不一样的驾驶方式,详细参数设置如表1 所示[18].
表1 中,最小安全间距do由式(16)定义,3,2,1 是式(16)中参数k的具体数值,它反映了不同驾驶员对安全间距的要求.在接下来实验中0.9 为道路附着系数条件下,do的值分别为:5.1,3.4 和1.7.
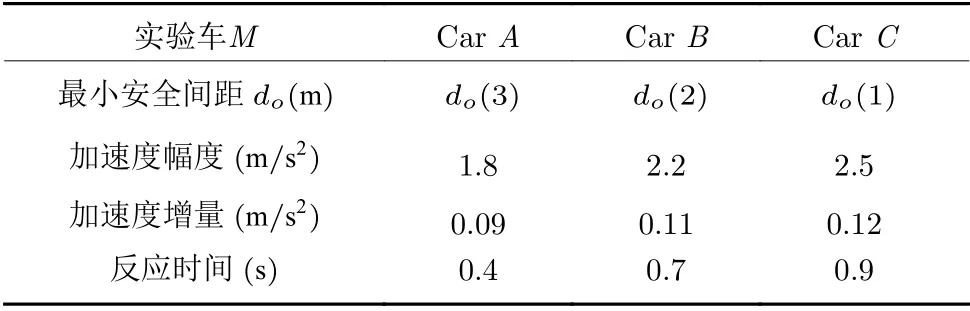
表1 智能驾驶员系统参数设置Table 1 The definition of the intelligent driver system
工况1.第1 种加速换道场景.
此工况下,装备智能驾驶员模型的实验车M以20 m/s 的速度正常行驶,此时其前方30 m 处交通车辆Lo正以18 m/s 的速度匀速行驶.其左前方车辆Lo与M初始间距5 m,车速25 m/s.左后方车辆Fd速度20 m/s,距M初始间距10 m.三种智能车执行加速超车的结果如图11~15 所示.
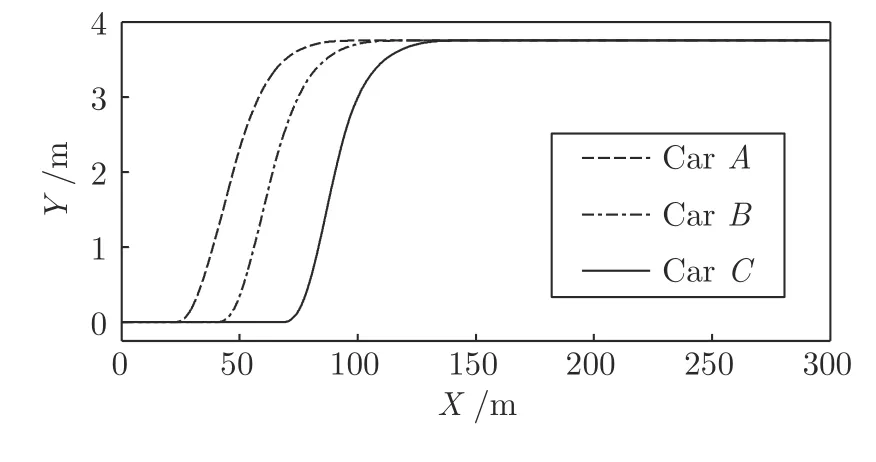
图11 工况1 换道轨迹Fig.11 The trajectory of the vehicle on work Condition 1
如图所示,三种智能车均自主完成了换道行为.车速和间距均以目标车道前车为跟车对象进行调整并逐渐趋于稳定.从速度曲线和轨迹曲线的分析可以看出,C车因安全间距do比A、B两车小,因此其启动换道的时刻最晚,同时速度调整也越快.根据速度曲线第45 s 时间内,C车率先减速,目的是为保持和前车Lo安全间距,而后发现邻车道具备换道空间进而加速驶入.
车间距的对比上,各个实验车与前车Lo的最小间距一段时间内始终保持约2 m,说明当前实验车换道后正超越前车Lo,此时两车在相邻车道上并列行驶.而换道结束后,实验车A、B、C对车辆Ld做跟车行驶并趋于稳定.由于各车执行换道的时间不同,三台车对Ld的跟车间距有所差异.由于A、B车同一工况下启动换道时间较早,此时虽与Lo距离较远,但离后车Fd距离较近,最终迫使Fd提前减速,使Fd与A、B车间的距离相比C车越来越大.
工况2.第2 种加速换道场景

图12 工况1 速度控制Fig.12 The velocity of the vehicle on work Condition 1

图13 工况1 智能车与原车道前车间距Fig.13 The distance between the intelligent vehicle with the lead vehicle of the original lane on work Condition 1

图14 工况1 智能车与目标车道前车间距Fig.14 The distance between the intelligent vehicle with the lead vehicle of the target lane on work Condition 1

图15 工况1 智能车与目标车道后车间距Fig.15 The distance between the intelligent vehicle with the follow vehicle of the target lane on work Condition 1
此工况下,装备智能驾驶员模型的实验车M以20 m/s 的速度正常行驶,此时其前方30 m 处交通车辆Lo正以18 m/s 的速度匀速行驶.其左前方车辆Lo对M初始间距0 m,车速22.2 m/s.左后方车辆速度22.2 m/s,距M初始间距30 m.三种智能车执行加速超车的结果如图16~20 所示.

图16 工况2 换道轨迹Fig.16 The trajectory of the vehicle on work Condition 2

图17 工况2 速度控制Fig.17 The velocity of the vehicle on work Condition 2

图18 工况2 智能车与原车道前车间距Fig.18 The distance between the intelligent vehicle with the lead vehicle of the original lane on work Condition 2

图19 工况2 智能车与目标车道前车间距Fig.19 The distance between the intelligent vehicle with the lead vehicle of the target lane on work Condition 2

图20 工况2 智能车与目标车道后车间距Fig.20 The distance between the intelligent vehicle with the follow vehicle of the target lane on work Condition 2
从速度曲线和轨迹曲线的分析可以看出,A车和B车由于对车辆安全间距do期望较高,因此提前减速对Lo进行跟车,待与Ld的间距达到期望的安全距离以后开始换道行为.C车由于对前后方的安全车距do要求较低,所以没有对Lo跟车减速,而是直接执行换道.三种车在换道过程中和环境车Lo,Ld和Fd的位置关系与工况一大致相同.且三辆车均以略小于前车Ld的车速稳定行驶,以逐步拉大与Ld的间距,保证纵向安全.
工况3.减速换道场景
假设在工况3 条件下,装备智能驾驶员系统的实验车M以20 m/s 的速度正常行驶,此时其前方40 m 处交通车辆Lo正以15 m/s 的速度匀速行驶.其右前方车辆Ld对M初始间距20 m,车速18 m/s.左后方车辆速度18 m/s,距M 初始间距10 m.三种智能车辆执行加速超车的结果如图21~25 所示.
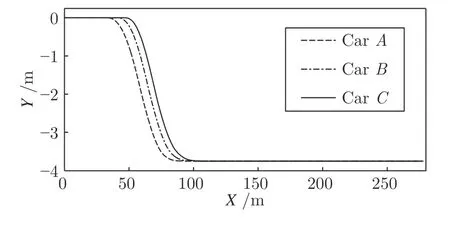
图21 工况3 换道轨迹Fig.21 The Trajectory of the vehicle on work Condition 3

图22 工况3 速度控制Fig.22 The velocity of the vehicle on work Condition 3

图23 工况3 智能车与原车道前车间距Fig.23 The distance between the intelligent vehicle with the lead vehicle of the original lane on work Condition 3

图24 工况3 智能车与目标车道前车间距Fig.24 The distance between the intelligent vehicle with the lead vehicle of the target lane on work Condition 3

图25 工况3 智能车与目标车道后车间距Fig.25 The distance between the intelligent vehicle with the follow vehicle of the target lane on work Condition 3
从速度曲线和轨迹曲线的分析可以看出,由于前车Lo和目标车道的车速均小于本车车速,且Lo车速小于目标车道的前车Ld.因此为了提高驾驶效率,智能驾驶员模型选择了向车速较慢的一侧进行换道行驶.此方案主要检验智能驾驶员模型在减速换道场景下的换道安全.综合以上三种工况,说明在同一种工况下,具有不同参数的驾驶员模型往往可以体现出不同的驾驶方式.
5 结束语
本文将结合智能车在道路行驶中可能出现的安全问题,设计了一种具有横向安全性的新型驾驶员模型.该驾驶员模型从结构上由速度控制器、转向控制器和感知决策模块组成.主要实现车辆准确跟踪轨迹并提高稳定性,减小侧向安全风险,实现自主安全换道.
首先,转向控制器采用预测模型结合车辆质心侧偏角、横摆角速度、侧向加速度和横向转移率的约束条件相结合,通过对性能指标与约束条件的二次规划求解,得出车辆模型的最优控制率.最终在高速、低路面附着系数以及转弯路况下,转向控制器具有良好的轨迹跟踪性能和侧向稳定性.
其次,为了避免在换道过程中与目标车道上的车辆发生碰撞,通过对目标车道安全间距的分析,确定出智能车执行换道的主要条件与驶入对象车道的参考加速度范围,采用线性模型预测控制理论设计速度调整控制算法进行车速的控制.为避免和原车道前车的发生碰撞,采用粒子群算法计算最优的换道路径.在三种换道工况下,智能车均实现了通用场景下的主动换道行为,并与环境车辆保持一定的安全间距.不同驾驶员参数的设置,也体现出了驾驶员模型在同一工况下的差异.
最后,本文还存在以下改进工作:
1) 实验中设置不同驾驶员模型参数所引起的驾驶行为差异,体现出实际行驶过程中不同驾驶员在同一路况往往体现出不一样的驾驶风格.针对驾驶风格的定义及其判定依据和主要参数指标目前依然缺乏客观统一的依据,后期仍需通过对真实驾驶数据的分析进行探索.
2) 实际路况复杂多样,论文研究难以对所有复杂路况进行一一验证.目前本文所做工作也只能在一般条件下的换道过程进行检验.如何使智能车适应更加极端的工况以及如何建立通用的换道检验标准也将成为本文接下来要进行的工作.
猜你喜欢
卫星应用(2021年11期)2022-01-19
北京航空航天大学学报(2021年4期)2021-11-24
科学大众(2021年9期)2021-07-16
中国交通信息化(2020年11期)2021-01-14
装备制造技术(2018年8期)2018-10-17
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
光学精密工程(2016年3期)2016-11-07
通信电源技术(2016年1期)2016-04-16
西北工业大学学报(2015年1期)2016-01-19