水平井压裂装置智能趾端滑套设计
2021-09-28 06:46:10郭岩宝田晓雨王德国
石油矿场机械 2021年5期
王 斌,郭岩宝,田晓雨,刘 奔,魏 辽,王德国
(1. 中国石油大学(北京) 机械与储运工程学院,北京 102249;2. 中国石油化工股份有限公司 石油工程技术研究院,北京 102206;3. 页岩油气富集机理与有效开发国家重点试验室,北京 100083)
水力压裂技术是通过高压水力作业,使油气层形成裂缝,提高油气产量的方法[1-3]。近年来,加大了煤层气、页岩油气和天然气水合物等非常规油气资源的开采力度,但是技术难度大,分段压裂技术逐渐成为解决煤层气、页岩油气开采难题的有效方法。其中,泵送桥塞分段压裂法由于其独特的优势,在压裂工程上被广泛使用[4]。该方法首先在水平井趾端首段完成射孔、套筒内加沙压裂,然后完成剩余层段的压裂[5-7]。
根据实际工况的要求,在首段压裂结束后,井筒与地层之间会形成流体通道,要想使整个压裂作业顺利进行,必须在该通道打开之前完成压力完整性测试[8]。由于常规的趾端滑套会随着压力的作用而开启,不能满足压力完整性测试的要求。因此,需要研发一种能保证在压力完整性测试之后开启的智能电控趾端滑套。目前,哈里伯顿等公司都相继推出了多种规格的电动压裂滑套[9-16]。国内对该技术的研究正处于试验阶段。
笔者针对常规趾端滑套无法在压力完整性测试之后开启的问题,创新设计了一种智能电控趾端滑套。该滑套能利用压力传感器技术,在水平井多级压裂的压力完整性测试阶段对压裂管道内的压力进行实时监测,并能根据压力变化自主控制滑套延时开启。同时,可通过与上位机联合控制,实现对该滑套的远程监控,弥补常规趾端滑套的缺陷,还能准确控制滑套的开启时间,对提高压裂装置的稳定性,以及油气藏的高效开发具有重要意义。
1 智能电控滑套结构
1.1 智能电控滑套工作原理
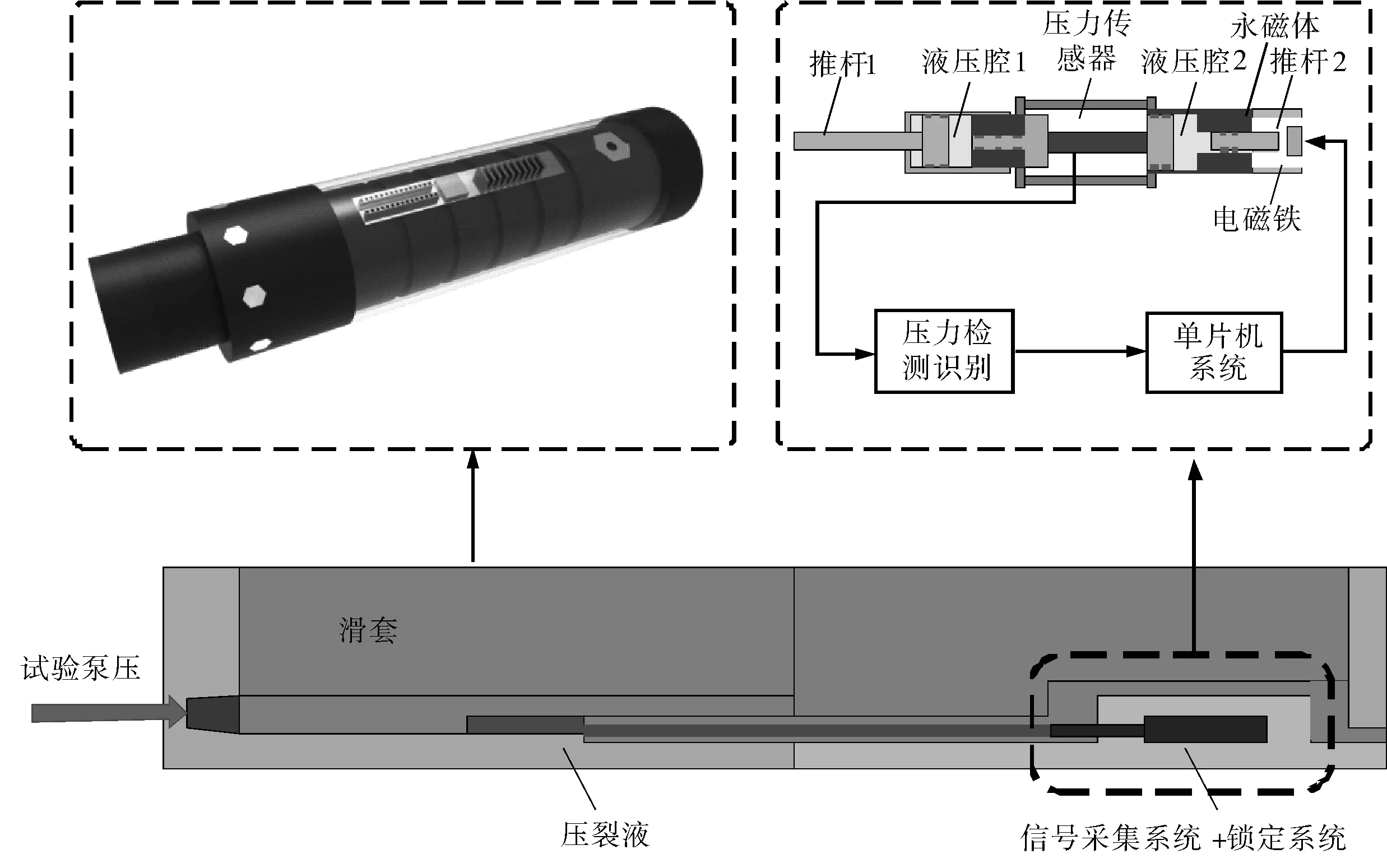
图1 智能电控趾端滑套的结构示意
1.2 锁定系统
由于锁定系统需要提供较大的力来平衡压裂液处的液压力,这对电磁铁的选型将造成一定的影响,故将锁定系统设计成二级压力转换装置,如图2所示。通过二级转换,降低电磁铁为推杆提供的平衡压力,节省耗电量。
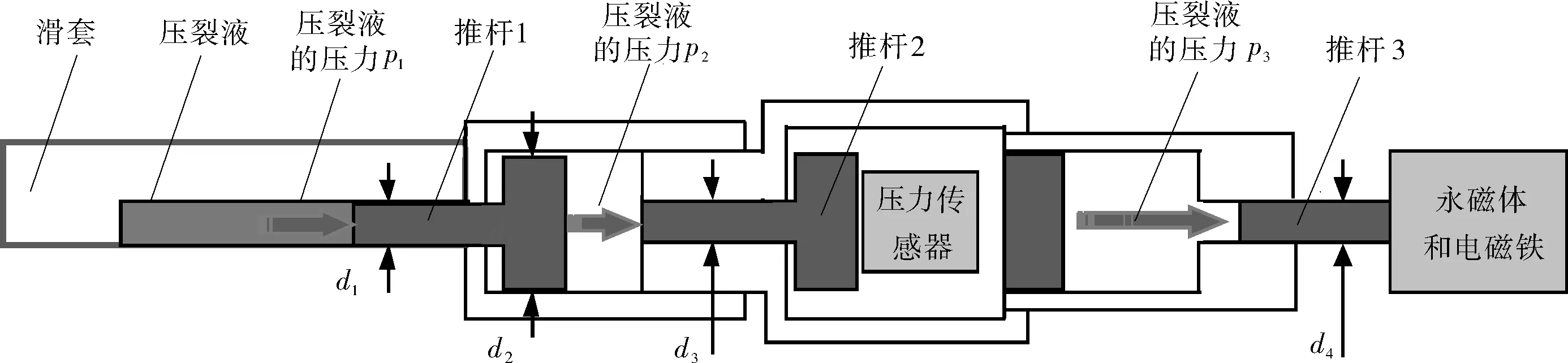
图2 二级压力转换装置示意
设定压裂液处需要平衡的液压力p1=120 MPa,d1=6 mm,d2=18 mm,d3=6 mm,d4=6 mm。根据帕斯卡定律,将该液压力进行一级转换:
p1·S1=p2·S2
(1)
式中:p1为推杆1左端压裂液的压力;S1为推杆1与左端压裂液的接触面积;p2为推杆2左端压裂液的压力;S2为推杆2与左端压裂液的接触面积。
由式(1)得:
(2)
同理,进行二级压力转换求得:
(3)
式中:p3为推杆3左端压裂液的压力。
这是电流可以通过的金属线。有电流通过的时候,手碰上它就糟了。所以要在金属线外面包一层橡胶皮。因为橡胶不导电。”
因此,推杆2对传感器的推力F2由式(4)~(5)得
F2=p2·S2
(4)
(5)
式中:F2为推杆2对传感器所施加的推力。
同理,由式(4)得推杆3处的推力F3为:
(6)
式中:F3为推杆3对传感器所施加的推力。
故电磁铁采用常开的形式,永磁体和电磁铁仅需要提供41.82 N的合力即可。为了提高锁定系统的安全系数,同时保证电磁铁提供安全范围的力,综合考虑,本文永磁体和电磁铁提供的力按照3∶1设计是合理的,即,永磁体分压90 MPa,电磁铁分压30 MPa。故,永磁体提供的推力F′为:
(7)
式中:F′为永磁体抵抗推杆3的推力所提供的抵抗力。
电磁铁提供的推力F″为:
(8)
式中:F″为电磁体抵抗推杆3的推力所提供的抵抗力。
1.3 锁定系统稳定性
由于受到p1的作用,锁定系统中最薄弱的环节出现在推杆1处。该处破坏将影响锁定系统的打开,进而影响趾端滑套的开启。为了验证在压力完整性测试状态下推杆1是否在压力作用下发生膨胀变形,从而影响锁定系统打开,本文通过ANSYS仿真软件对该处的应力、应变和形变进行分析。由图3a所示,推杆1处径向截面处的应力差值较小,说明p1对径向截面的影响较小;由图3b知,推杆1处的轴向应变较小,说明锁定系统可较长时间保持平衡;由图3c知,推杆1处的轴向应变较小,应力集中在受力面。
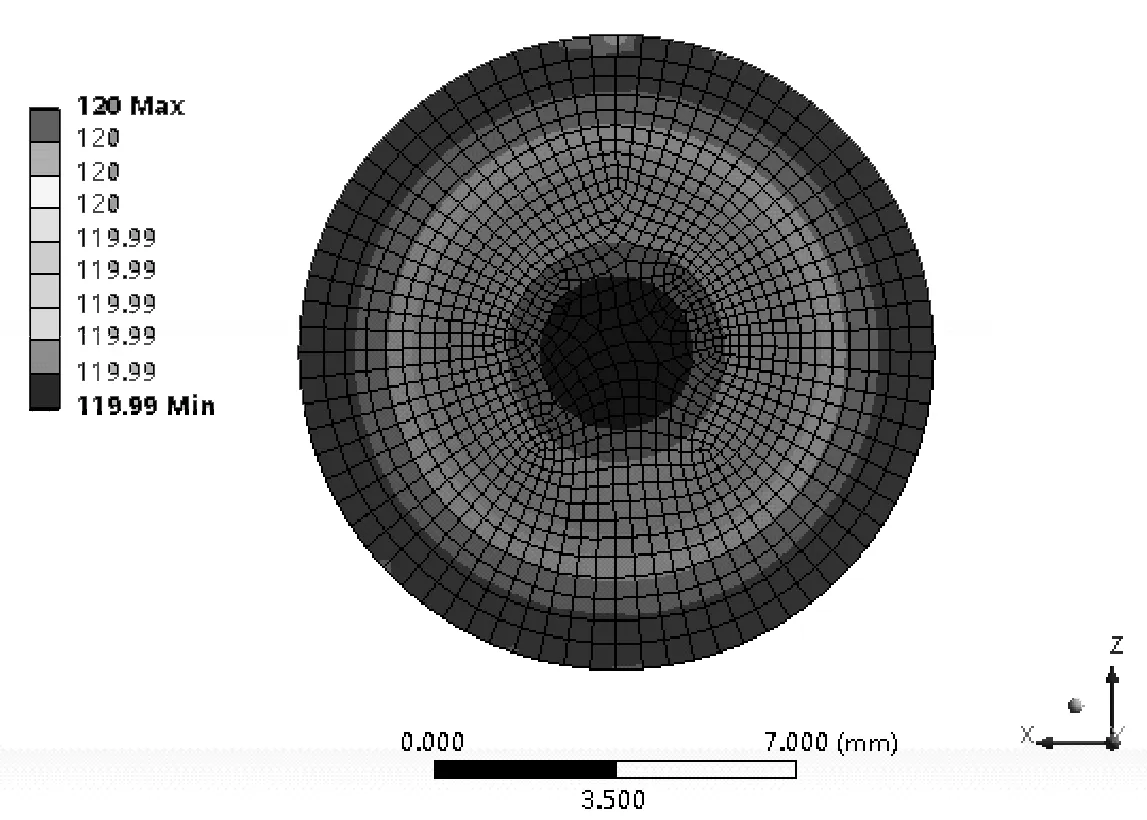
a 径向面应力云图
综合以上计算和仿真分析结果,证明锁定系统的设计较为合理,可以保证滑套在压力完整性测试结束后安全、准确地打开,为后续井段的压裂作业提供安全保证,也为水平井多级压裂系统的安全、高效运行创造了条件。
2 电控趾端滑套控制系统
智能电控趾端滑套的控制系统主要由HKM-189-375型压力传感器、PIC18F4680型单片机系统、时钟延时模块、锁定系统和上位机组成。上位机安装了通过Python和OpenGL软件自主开发的可视化界面软件。单片机系统通过无线网络与上位机远程连接,可实时监控滑套的位移、速度、加速度和管内压力,具有实时监控滑套的功能(如图4所示)。
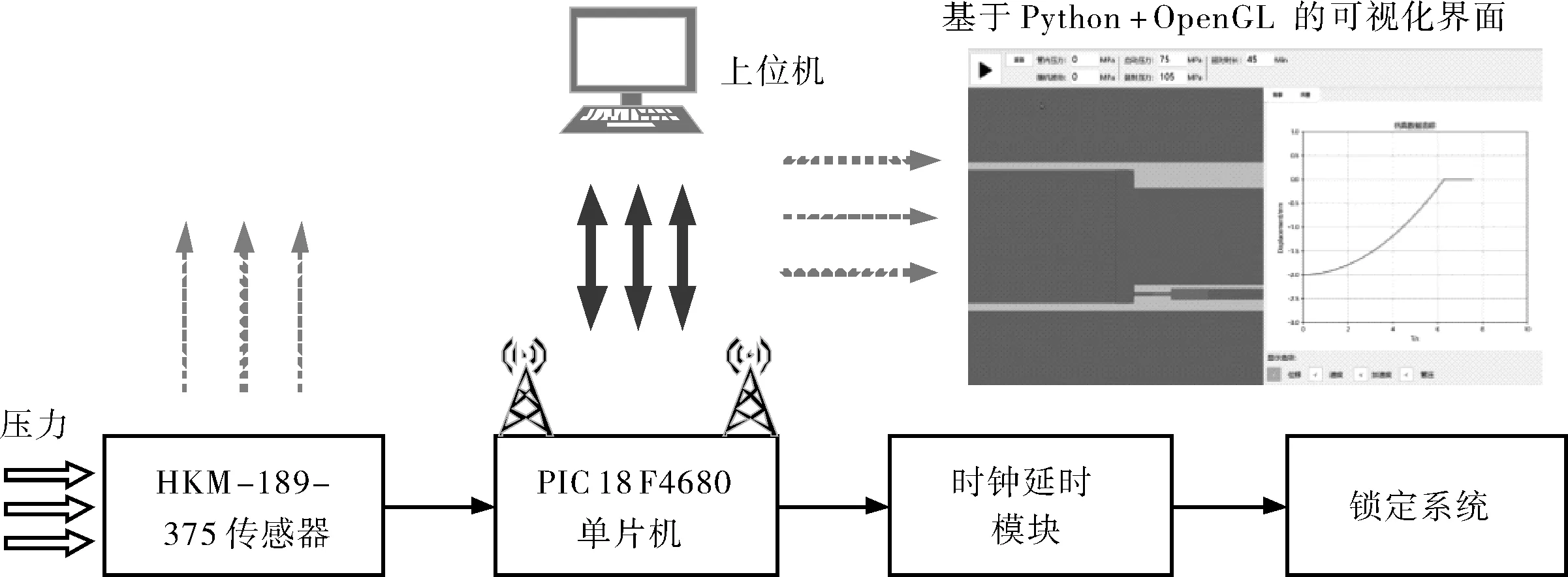
图4 控制系统原理框图
2.1 控制板设计
根据功能要求,创新设计了智能电控趾端滑套的控制电路,如图5所示。单片机系统的RD0口连接电磁铁线路,电磁铁(电磁铁型号选择ELE-P25/20)单独由BAT2口提供+5 V的电压,可提供80 N的吸力。RA0口连接运放电路(运放模块型号选用OPA330AIDBVR),该电路通过SSR引脚口与压力传感器连接;TPS76901-HT为稳压模块,保障输出电压的稳定性。
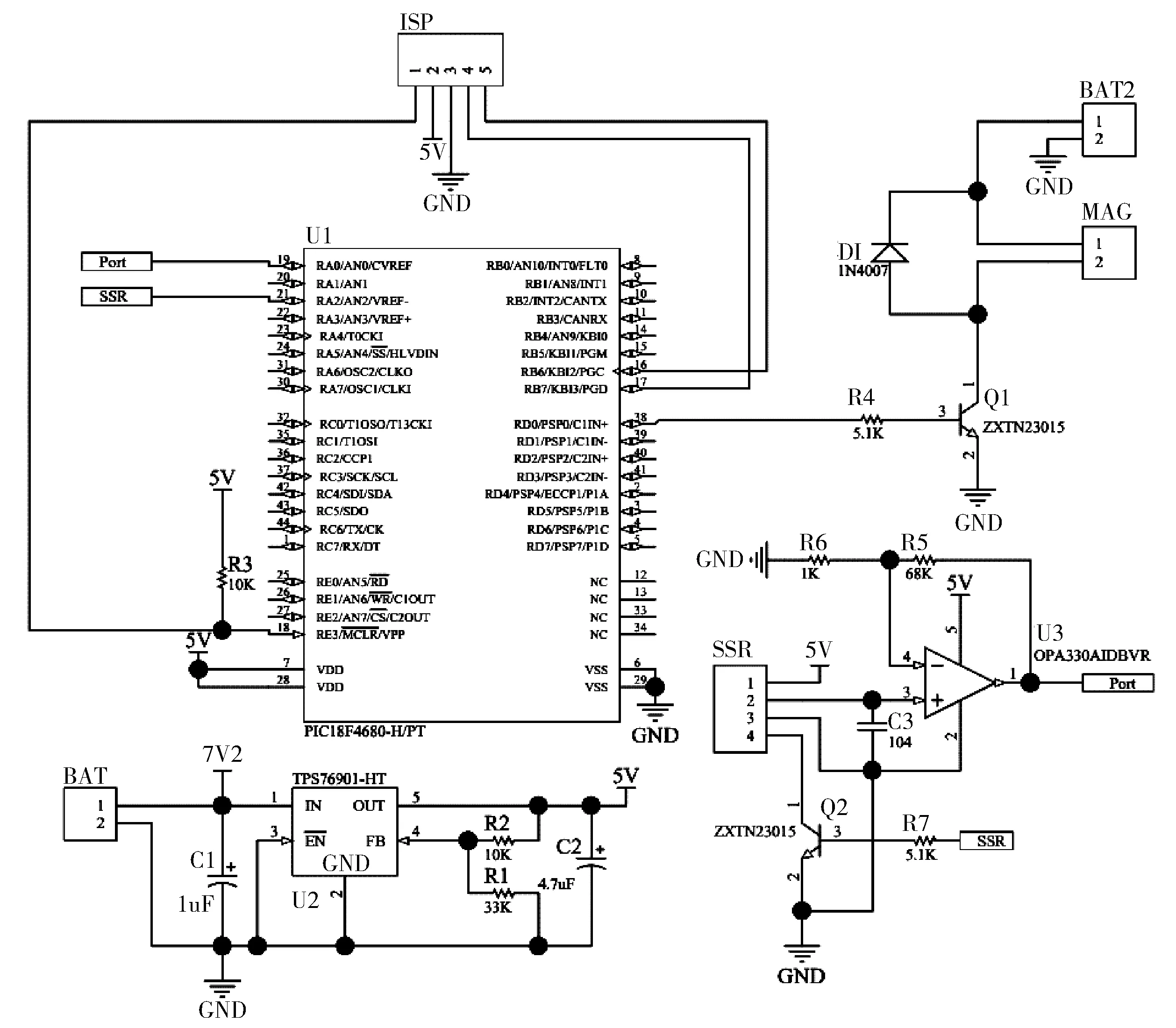
图5 智能电控趾端滑套的控制电路
考虑到趾端滑套受工作环境和工作空间的限制,通过Altium Design软件设计了体积小、耐高温的PCB板,如图6所示。PCB板的材料采用覆铜箔环氧玻纤布层压板,可耐150 ℃的高温,具有良好的耐热性能和力学性能,可以保证其在井下稳定工作。PCB板的尺寸设计为64.6 mm×25.4 mm×20.0 mm,保证其能在空间较小的环境中运行,如图7所示。
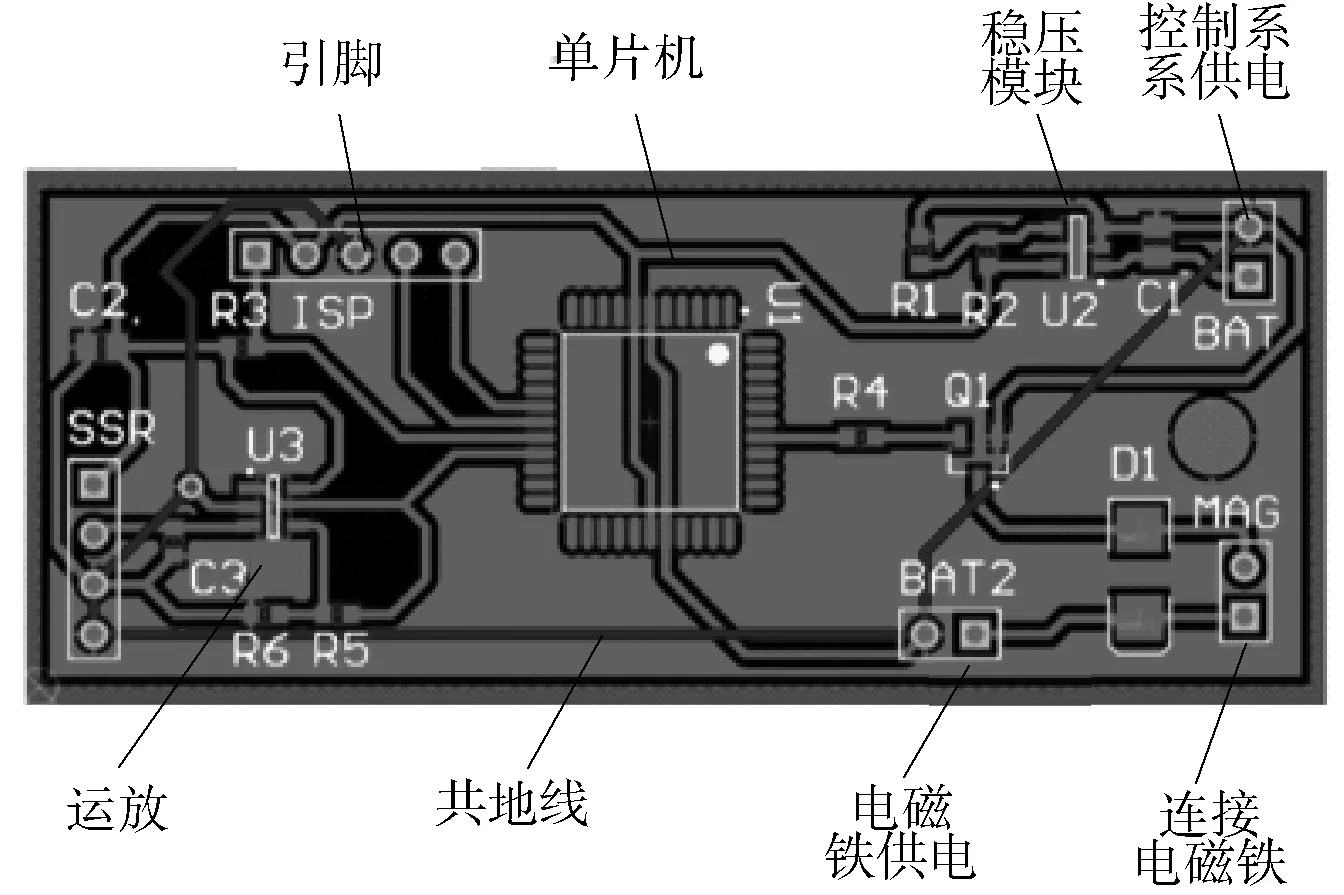
图6 PCB原理设计
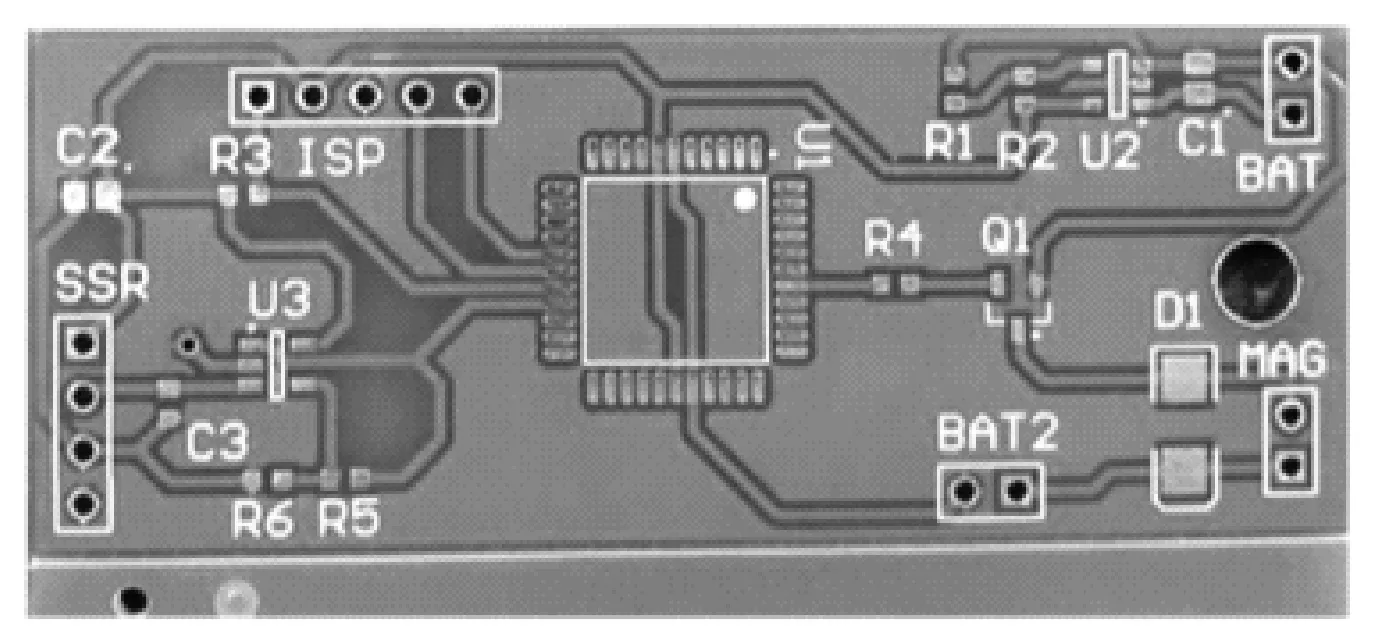
图7 PCB板加工实物
2.2 低功耗控制系统
由于智能电控趾端滑套在压裂作业中要独立自主地完成所需工作,考虑到控制系统的功耗问题,创新设计了具有省电模式的控制程序,如图8所示。当电滑套启动后,系统开始检测电量,如果电量过低,为了不影响剩余井段的压裂作业,控制系统会直接跳出延时程序并开启滑套,确保滑套能正常开启。当电量可以满足控制系统运行,此时给传感器供电,并实时监测判断推杆2处压力是否为压力完整性测试时的压力范围。如果该处无压力信号,系统会进一步判断无信号时间,若长时间(此处设置为45 min)无压力信号,控制系统会进入省电模式,此时系统为了减少功耗,会控制所有元器件进入休眠状态;若无信号时间较短,系统会复位重新运行。
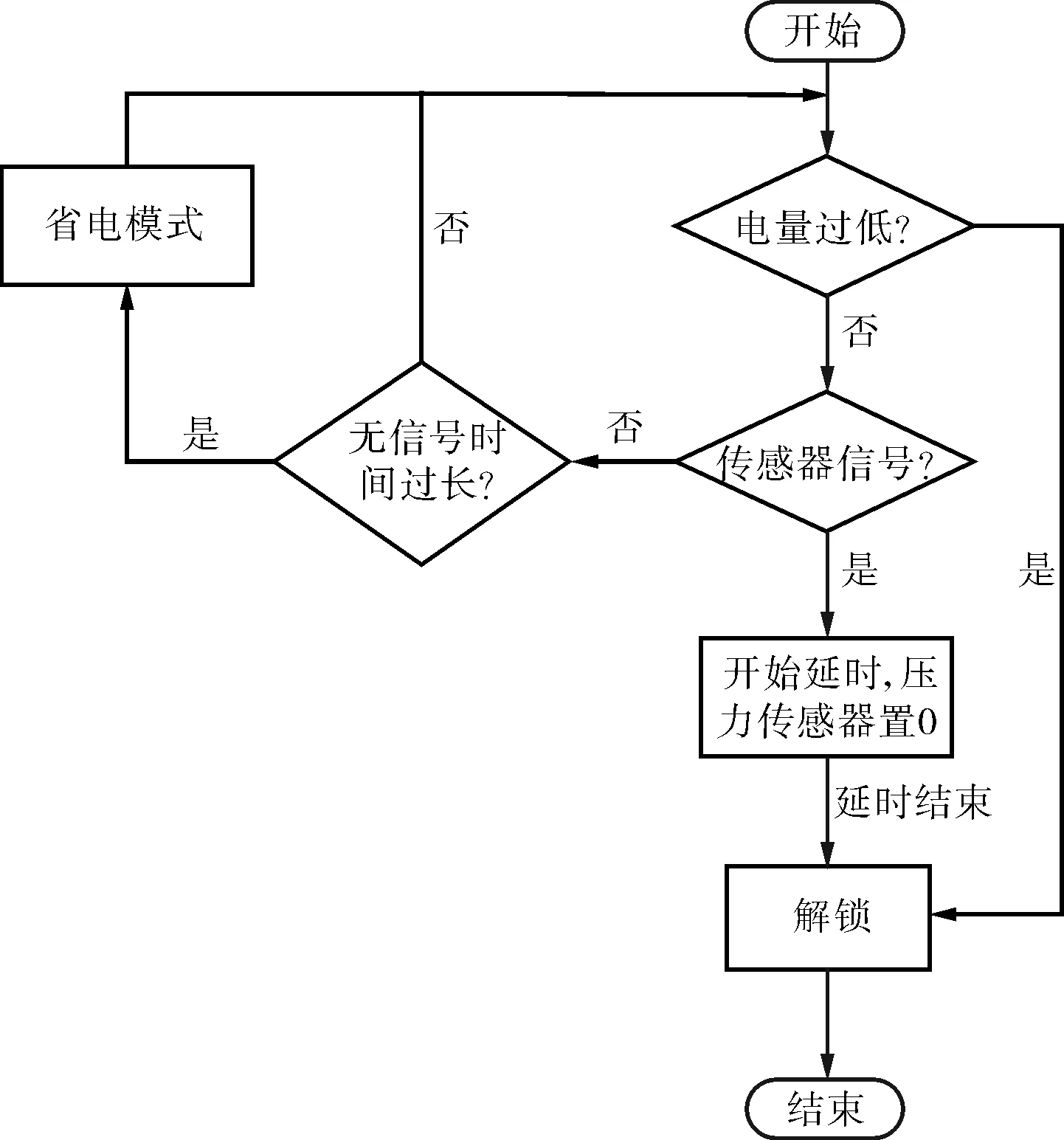
图8 智能电控滑套省电控制软件流程图
如果检测到该处压力信号属于压力完整性测试时的信号范围时,单片机控制电磁铁上电,同时控制延时模块开始延时,压力传感器置0(此时已经检测到压力完整性测试阶段压力信号,压力传感器后续不再需要,为了降低功耗将其置0)。当延时45 min后,系统控制电磁铁断电解锁,压裂液被释放,此时滑套移动并进入下个井段,进行压裂作业。
2.3 功耗测试
为了证明本文设计的控制系统具有良好的省电特性,采用UNI-T高精度可编程直流电子负载仪测量其耗电量。考虑到测试整个控制系统耗电量的复杂性,选择将单片机系统和锁定系统单独测量,2个系统各测量20组,每组重复测试3次3并取平均值,每组测试时间设计为45 min。
由图9可得,单片机系统的平均耗电量为3.18 A·h,每组测试的耗电量差距较小;由图10可得电磁铁的平均耗电量为0.16 A·h,耗电量较少。
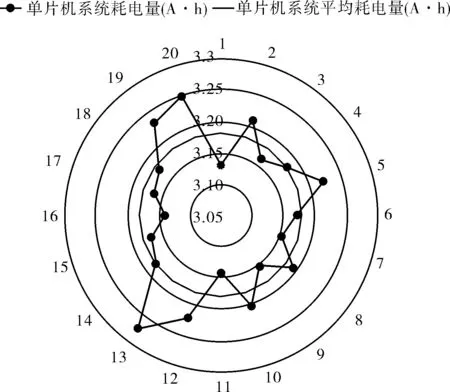
图9 单片机系统耗电量
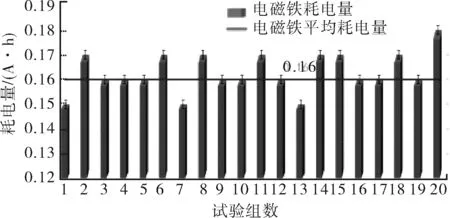
图10 电磁铁耗电量
综合单片机系统和电磁铁的耗电量可得整个控制系统的平均耗电量约为3.34 A·h,因此选用4 A·h的供电电池即可满足设计要求。
3 模拟试验
为了验证该智能电控趾端滑套控制系统的可行性,考虑到该装置目前在试验阶段,因此通过模拟试验来验证该控制系统的可行性。模拟试验采用本文设计的控制系统和stm32模拟开发板联合完成,通过控制stm32模拟开发板上的滑动变阻器阻值大小来模拟压裂过程中的压力大小,通过指示灯的亮灭模拟电磁铁的通电和断电。该模拟试验的电路设计如图11所示,OPA314DBV为运放电路,其作用是控制滑动变阻器运行;滑动变阻器与PIC18F4680型单片机的RA0引脚连接;D2小灯电路模拟电磁铁的通电和断电,该电路由2N1711三极管驱动。
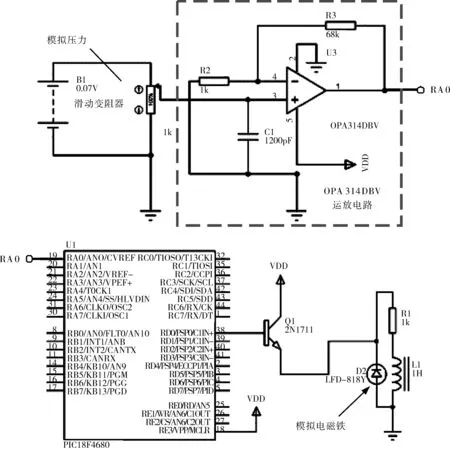
图11 智能电控滑套模拟试验电路图
智能电控趾端滑套模拟试验系统如图12所示,LED小灯电路、滑动变阻器电路、电磁铁电路全部由stm32模拟开发板提供。本文通过检测阶段(如图12a)模拟压力完整性测试阶段,通过转动滑动变阻器调节阻值大小模拟压力完整性测试压力,电源指示灯点亮证明电源电量充足;当检测到压力完整性测试的模拟电压信号时,D2小灯点亮、电磁铁通电并进入延时阶段(如图12b),开始延时,该试验设置的延时时间设置为45 min。
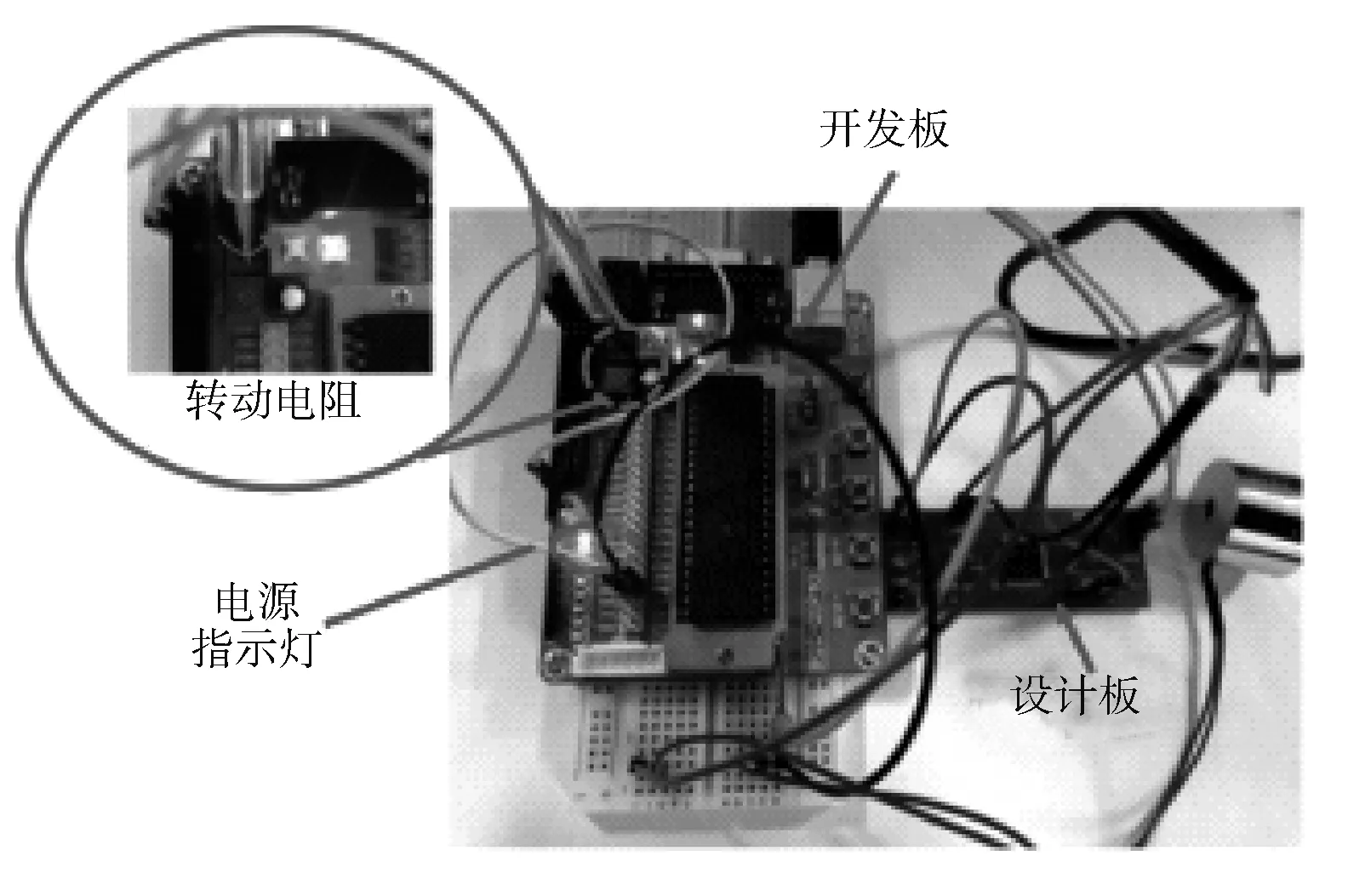
a 检测阶段
为了验证实际条件下电磁铁通电是否能满足所提供的力,本文通过试验测试电磁铁通电时所提供力的大小。为测试电磁铁的力,将电磁铁固定在墙体上(如图12c),当电磁铁通电时,采用端部为磁性材料的测力计来测量力大小。为了验证电磁铁所提供力的稳定性,共进行20组试验,每组试验重复3次,取平均值。
测试电磁铁提供力的结果如图13所示,每组试验的误差较小,而且每组试验测得的电磁铁力较平均,电磁铁提供的平均力为11.1 N。由此可得,该智能电控趾端滑套能够在压力完整性测试阶段提供足够大的力来维持锁定系统平衡,为后续井段的压裂作业提供较好条件。
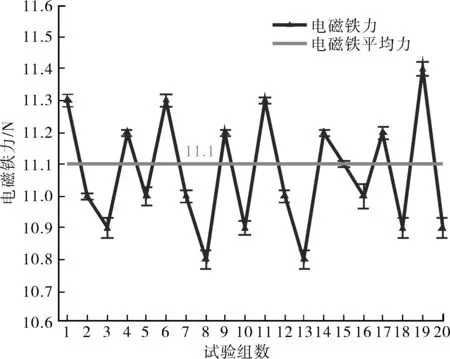
图13 电磁铁力测试结果
4 结论
1) 对智能趾端滑套的锁定系统进行数值计算和ANSYS有限元分析,证明其具有较高的可行性;通过仿真模拟试验,进一步证明了该系统具有良好的稳定性;通过功耗测试验证了该系统所需的功耗较低,保证了压裂过程的顺利进行。
2) 利用单片机技术使该滑套实现了在延时结束后能够精确、有效地开启,避免了由于高压环境对滑套结构寿命的影响;除此之外,具有省电模式的控制系统和较小尺寸的硬件设计,保证了该滑套在实际工况中具有较高的可行性。
3) 该工具在下井前的功耗控制,以及在下井后如何触发滑套的电源开启方式等方面还需要进一步研究。
4) 该设计对提高滑套的使用寿命和安全性具有重要意义,对今后在实践工程上的应用也体现出较高的可行性,而且将有效提高滑套开启的准确性,对趾端滑套未来的发展方向起到了指导性作用。
5) 为了进一步完善和优化该设计,下一步将从远程监控滑套状态和功耗两个方面做进一步研究,从而提高该设计在实际工程应用上的优越性。
猜你喜欢
经营者(2024年1期)2024-03-19 02:02:34
小猕猴智力画刊(2022年10期)2022-11-02 06:33:56
机械工业标准化与质量(2021年8期)2021-10-13 06:44:24
防爆电机(2021年2期)2021-06-09 08:14:38
减速顶与调速技术(2021年3期)2021-03-09 03:15:00
设备管理与维修(2018年15期)2018-11-08 06:14:50
设备管理与维修(2018年8期)2018-08-13 12:09:14
中国核电(2017年1期)2017-05-17 06:10:00
汽车维修与保养(2015年2期)2015-04-17 01:30:41
武夷学院学报(2014年5期)2014-07-19 10:08:27