
SCARA(斯卡拉)型机械手在书法和绘图中的应用
2021-09-27 08:57西安建筑科技大学华清学院张永昊王朝阳
电子世界 2021年15期
西安建筑科技大学华清学院 张永昊 王朝阳
本文介绍了一种用于书法、绘画的水平关节机械臂的设计。通过大量的实验与分析,将步进电机应用到机械手中,步进电机易于控制且精度高可达到机械手快速、稳定书写、绘画的要求。就在书法和绘图中的应用中,SCARA(斯卡拉)型机械手相对于其他关节型机械臂来说具有成本低、易控制、运动速度快等特点。
当今社会机械与工业领域日益交融,但是机械在文化方面的交融是少之又少,因此我们提出机械手和书法绘画相结合、这不仅是艺术和技术的交融,也是中国传统文化的延续发展,对于提高学生书写绘画水平具有非常积极地意义(见图1)。
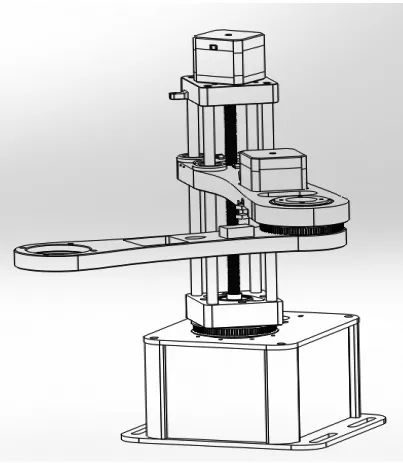
图1 机械手示意图
1 总体方案的设计
总体方案从结构和控制两方面来介绍。
结构方案为三自由度SCARA结构,通过大臂、小臂的转动来完成末端在水平面上的移动,通过Z轴的转动,使末端在垂直方向上的移动。垂直移动和水平移动电机分明,SCARA结构善于在平面做往返运动,具有成本低、运动速度高、定位精度高等特点。
控制方案为基于PC+单片机运动控制器的控制系统。PC端的任务为规划任务和主要的人机交互,单片机的任务为控制运动和次要的人机交互。这种方案具有投入成本低、设备普及率高、系统开发方便等特点。
2 机械结构的设计(见图2)

图2 结构示意图
就以上图纸我们进行结构介绍:
(1)基座:基座由上下两个钢板、周围四块亚克力板、四块铝型材构成,其作用在于固定。
(2)Z轴(竖直)结构:此结构由光杠、丝杠、光杠固定座、直线轴承、电机1、构成,并与基座链接。可通过电机1使丝杠转动,用来带动连杆进行垂直运动。
(3)X、Y轴(水平)结构:此结构由连杆1、电机2、连杆2构成,并通过四个直线轴承和与Z轴链接。电机3转动,并通过减速装置使Z轴转动,连杆1和连杆2也会随之转动。
经过以上装置联动,末端执行器即可以在X、Y、Z轴限位内的空间内移动。
3 运动学分析
本文主要建立在SCARA机械手坐标系的基础上,运用数学图解方法创建运动学模型并且进行正逆运动学分析。
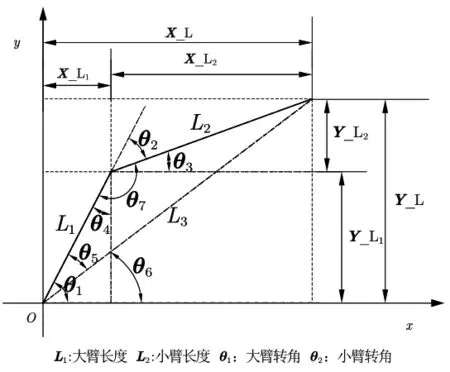
正运动学分析:
已知:θ1,θ2求关节末端坐标(X-L1,Y-L1)与(X-L,Y-L)

即第一关节末端坐标为:
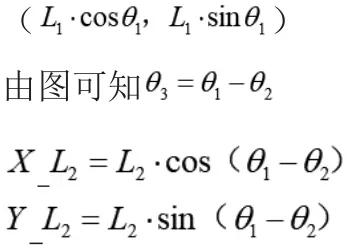
最终末端坐标为:

逆运动学分析:

化简后得:
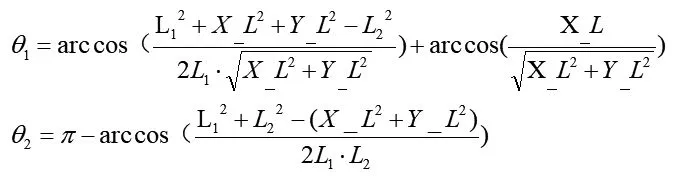
经上述计算,关节角度和末端位置便有了明确的关系,若出现了多个解,则需要取各轴移动距离最少的最优解(见图3)。
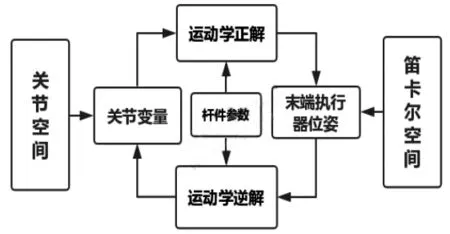
图3 姿态-坐标关系图
运动学的分析主要解决的是关节和末端执行器位置和姿态的问题。对现代机械手的运动学特征进行了理论分析,有正向机械运动学的理论分析,反向机械运动学的理论分析,前者是一直各关节的参数通过算法来推出末端位置和姿态,而后者是已知末端的姿态通过算法来反推各个关节的姿态。
4 软件设计(见图4)
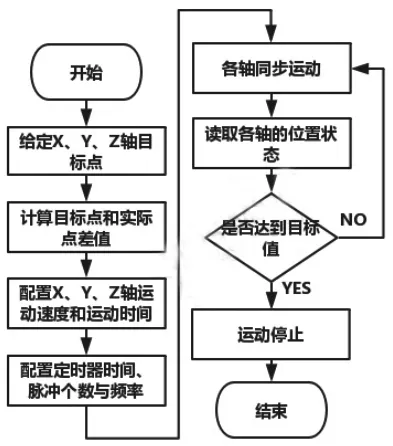
图4 运动控制图
5 控制系统
本机械臂的驱动器件为步进电机,控制系统通过对步进电机的控制来达到控制机械臂的目的。因本SCARA机械手结构简单、用于书法,负载相对来说较小,发生丢步的可能性极小。故控制系统采用开环控制(见图5)。
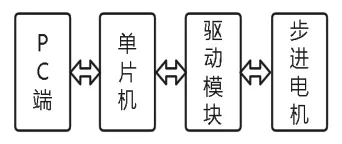
图5 系统关系图
整个系统主要部分可分为上位机(PC端)、下位机(单片机)、驱动模块、驱动器件(步进电机)四部分构成。PC主机主要为发送位置代码和其他控制参数,单片机负责接收数据以及按照PC端所发送的参数进行解析驱动步进电机的运行,进而可实现PC端对机械臂的控制。
结束语:随着科学技术的不断发展,机械臂产业已经成为本世纪的朝阳产业。本文将三自由度的SCARA(斯卡拉)型机械手作为主要研究对象,根据书法的所需软硬件的需求,设计了三自由度的SCARA(斯卡拉)型机械手本体机构,制定了其总体方案,并且针对运动学的分析、轨迹规划以及其控制系统等问题进行了相关的研究,满足了在一般的书法绘画要求。机械在文化方面上的发展有待完善。
猜你喜欢
环球人物(2020年22期)2020-12-23
河北省科学院学报(2020年1期)2020-05-25
重型机械(2019年3期)2019-08-27
环球时报(2019-08-23)2019-08-23
制造技术与机床(2018年11期)2018-11-23
制造技术与机床(2018年11期)2018-11-23
河北农机(2017年12期)2018-01-20
制造技术与机床(2017年4期)2017-06-22
通信电源技术(2016年1期)2016-04-16
海军航空大学学报(2015年1期)2015-11-11
