
陆空一体探索、进攻机器人
2021-09-27 08:57南京航空航天大学金城学院白千帆张明霞赵慧弢冯时瑞
电子世界 2021年15期
南京航空航天大学金城学院 白千帆 张明霞 赵慧弢 冯时瑞
本文设计了一种车载电磁炮与伴飞无人机系统,采用多主控的方式,实现了由上位机控制、可自主探索的机器人。在机器人发现目标物时,机器人会自动瞄准目标,上位机发送开炮指令后,机器人会进行电磁炮充能并发射,摧毁目标。车体运动时,无人机实现实时跟随伴飞,形成空中威慑。
本文设计的一种车载电磁炮与伴飞无人机系统,采用多主控芯片分别控制不同的部分:车体采用STM32G0作为主控,实现接收上位机的指令、采用PID控制车体行进、采集传感器数据进行路径规划等功能;电磁炮识别采用OpenMV摄像头,电磁炮二轴云台采用STM32F0作为主控,通过串口接收数据对舵机进行PD控制;无人机采用STM32F4作为主控,实现飞控算法等功能。同时,分别设计并实现多电路板并行工作,保证了各部分的供电安全与高集成度。
随着现代科技的发展和作战战术的发展,对小型智能导弹的需求越来越大。而电磁炮作为一种小型智能导弹,是目前国防以及科技发展的方向之一。其原理为使用洛伦兹力加速弹丸,比依赖化学能发射的传统火炮更加精准,并且具有初速度快、加速度可控等优点。同时,电磁炮不仅可以广泛应用在武器领域,其同样可以应用在相关物理课堂教学中作为教学模型,激发学生的学习兴趣。
1 系统总体设计
本项目是基于STM32的具有上位机远程调控、车载电磁炮与无人机一体化的探索、进攻机器人设计。其中,车体部分采用万象轮与后两轮双驱的设计,以STM32G0作为主控,结合激光测距雷达、Zigbee无线通信、2.4G无线通信、电机编码器等设计而成。电磁炮部分采用二轴云台方向设计,以STM32F0为主控,并搭载舵机供电电路。无人机部分以STM32F4为主控,搭载MPU9250、BMP280等外设。
系统采用上位机远程调控与下位机自动运行结合的方式进行工作。车体部分行进的同时,OpenMV摄像头进行实时图像识别,一旦发现目标物立即瞄准并通过串口传输信号给电磁炮控制单元与车体控制单元。此时车体立即停车,电磁炮控制单元收到信号后,立即触发继电器,实现电磁炮电容充电、发射的动作。在此期间,无人机在车体部分行进时实现伴飞动作,并悬停在目标物附近,形成空中威慑。
2 系统硬件电路设计
2.1 电磁炮系统硬件电路设计
电磁炮系统硬件电路包括储能电路、电容充电电路、电容放电电路和电容充放电开关电路。储能电路采用4个1000UF电容器与6个220UF电容器,耐压值为450V,并设有AD采样分压电路,可实现对弹丸的三级加速。电容充电电路采用继电器控制,工作时由升压模块将12V输入电源升压至450V对电容进行充电。电容放电采用可控硅作为触发器件,红外管作为触发信号源进行三级加速触发。电容充放电电路接口为充电电路继电器控制端口与第一级触发电路控制端口。考虑到控制的安全性,采用两路继电器模块进行控制,并预留I/O接口供二轴云台控制单元进行控制。
2.2 二轴云台系统硬件电路设计
二轴云台系统采用两路DS3120MG舵机,工作电压为4.8V-6.8V,在4.8V时扭矩为18.2kg.cm,工作电流为1A,堵转电流2.5A。考虑到供电电流较大,故在云台控制电路板的设计中采用MP2482DN降压BUCK电路,其最大工作电流为5A,可以满足设计需求。同时,另采用AMS1117作为MCU以及OpenMV的线性电源。MCU采用STM32F030F4P6,预留串口接口与程序接口,接收到控制信号后立即对两个舵机进行PD控制。同时,也可以通过预留的板载按键进行简单操控。二轴云台原理图如图1所示。
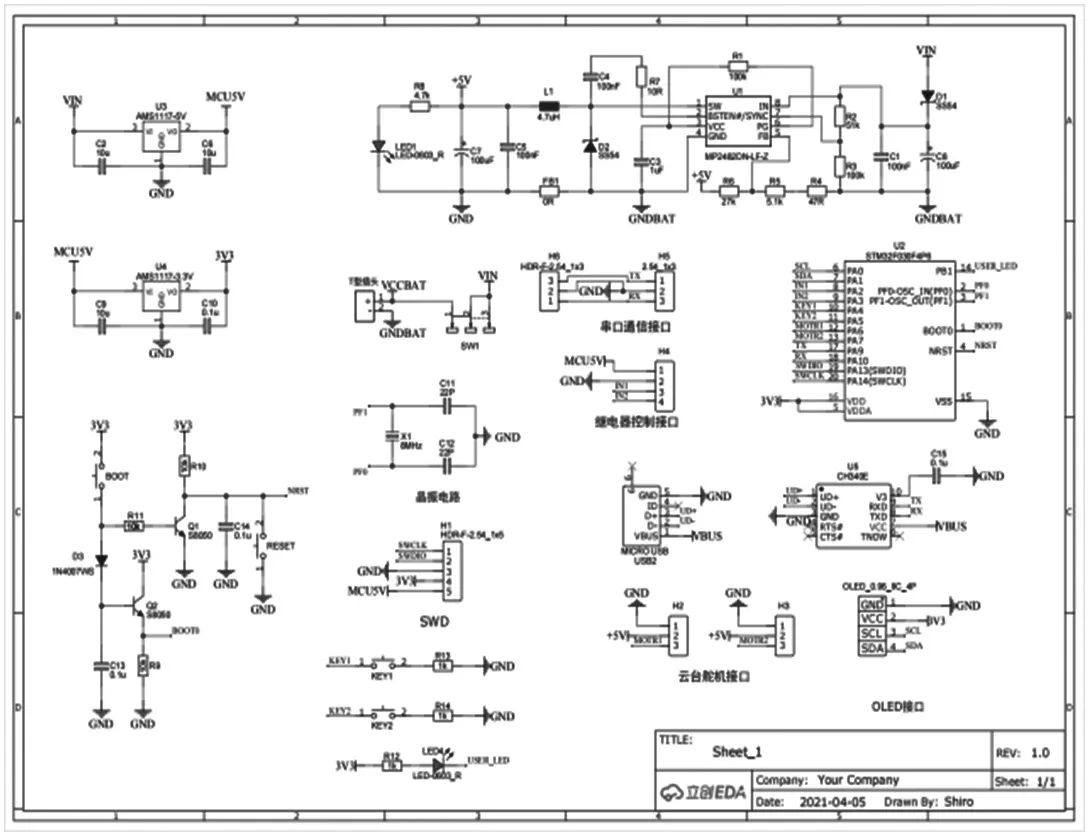
图1 二轴云台原理图
2.3 车体系统硬件电路设计
车体系统采用STM32G070CBT6作为主控芯片,其芯片资源丰富,拥有4路串口,能够满足此次设计的需求。车体系统电路板采用L7805CD2T与XC6206芯片进行供电,并板载TB6612FNG电机驱动芯片与两路电机接口。同时,预留出4路串口等接口,外接Zigbee无线通信模块、激光雷达模块、2.4G无线通信模块等。车体系统原理图如图2所示。
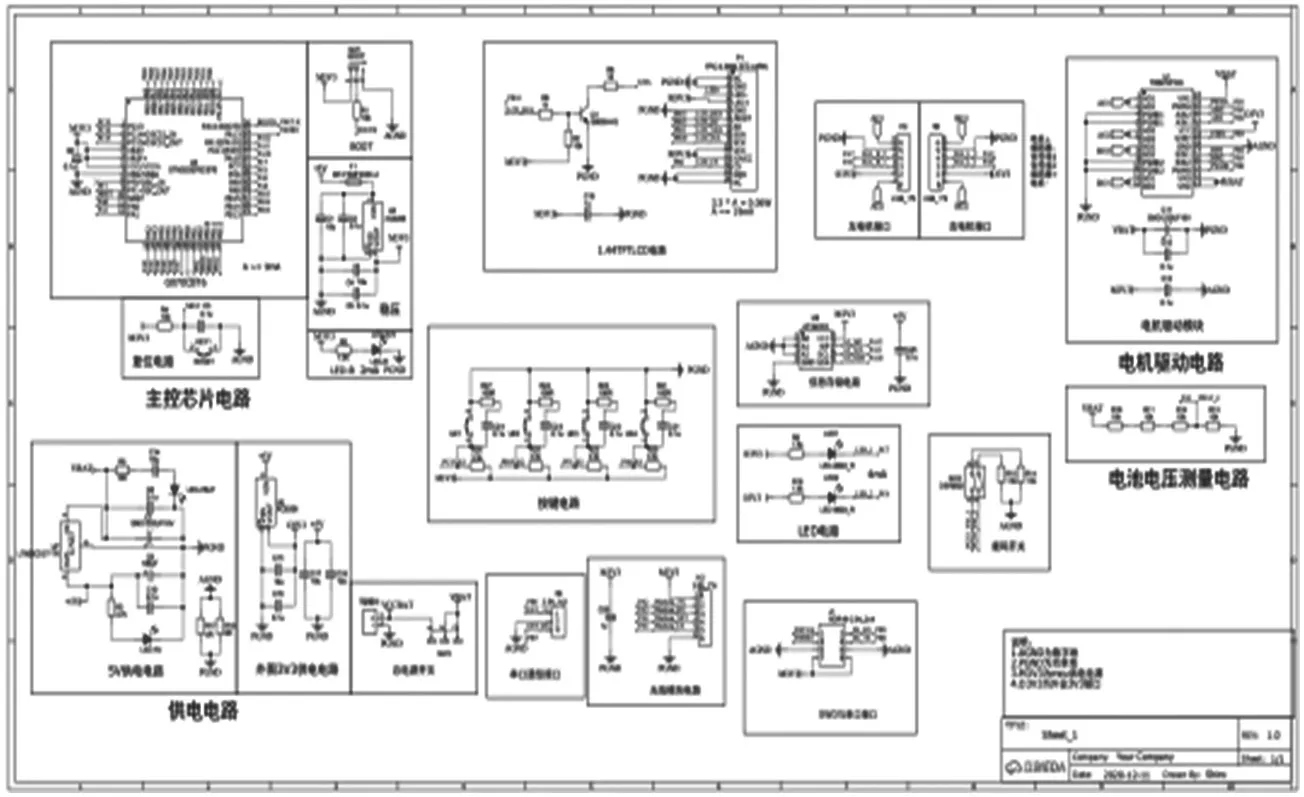
图2 车体系统原理图
2.4 无人机系统硬件电路设计
无人机系统采用STM32F411CEU6作为主控芯片,并板载MPU9250、BMP280等外设,方便在飞行时进行传感器数据的读取。各芯片的封装均为UQFN封装并采用四层板设计,方便缩小电路板体积,提高结构稳定性。
3 系统软件设计
3.1 二轴云台系统软件设计
系统通过预留串口接收OpenMV摄像头的图像处理信息,接收其计算好的图像与电磁炮准心偏差值,当角度在系统设定的范围内时,直接对舵机进行控制,否则则偏转最大范围。数据传输的结构为形如“M1xxx”,“M2xxx”的五个字符组成的字符串。其中,“M1”表示控制纵向舵机,“M2”表示控制横向舵机,“xxx”表示计算出的定时器CCR寄存器值的比较值。主控芯片STM32F030F4P6通过定时器3通道1和通道2生成对应占空比的PWM波来改变舵机的位置。
3.2 车体系统软件设计
系统上电后进行模式选择,通过上位机Zigbee模块发送相应指令或通过电路板板载按键进行选择,可设置自动探索模式与手动操作模式。自动探索模式通过采集激光雷达数据进行路径分析,通过一种蛇形路径规划方案来实现车体系统的自动探索,如图3所示。手动操作模式通过接收上位机的指令进行相应的移动,包括:前进、后退、左右转、停车以及相应的速度设置等。同时,车体系统搭载24L01无线传输模块,可以将运动指令实时传输给无人机。
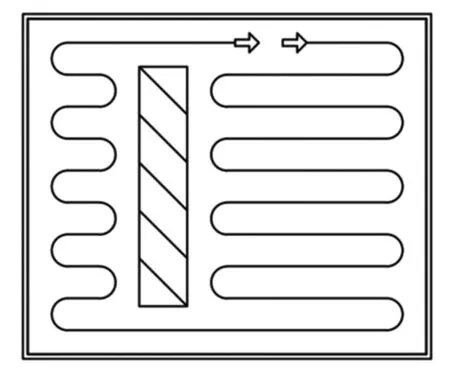
图3 蛇形路径规划方案
3.3 OpenMV软件设计
图像数据由OpenMV感光芯片收集,并回传160*120分辨率图像,通过对图像的预处理,采用颜色识别的方式,对图像中的最大在提前设定好的颜色阈值内的色块进行框选,取出最大色块的像素信息及位置信息对其处理,通过计算获得电磁炮准心与目标物的偏差值。对于获取的偏差值,将其送入PID控制器中,通过控制器的计算,得到舵机云台水平和俯仰的输出值,通过OpenMV串口将输出值传送给二轴云台系统主控,通过STM32实现对舵机的进一步控制。
结语:本文设计了一种基于STM32的具有上位机远程调控、车载电磁炮与无人机一体化的探索、进攻机器人设计。通过Zigbee模块可以使上位机与下位机相连,传输信息并进行控制。车体探索过程中,OpenMV摄像头实时进行识别,发现目标物后,二轴舵机云台系统实时进行瞄准,并在上位机发送开炮指令后,进行电磁炮充能并发射,摧毁目标。车体运动时,无人机实现实时跟随,形成空中威慑。实际作品如图4所示。
猜你喜欢
现代装饰(2022年6期)2022-12-17
现代装饰(2022年6期)2022-12-17
摄影之友(影像视觉)(2020年2期)2021-01-14
自动化学报(2019年6期)2019-07-23
电子制作(2019年23期)2019-02-23
电子制作(2018年18期)2018-11-14
电子制作(2018年12期)2018-08-01
消费导刊(2018年8期)2018-05-25
电子制作(2018年1期)2018-04-04
制造业自动化(2017年2期)2017-03-20
