
计算机辅助环形外固定器在足踝外科中的临床进展
2021-09-27 09:17关升升杜辉秦泗河
中华骨与关节外科杂志 2021年6期
关升升 杜辉 秦泗河
(1.美国加州湾区足踝外科诊所,95008;2.北京积水潭医院矫形骨科,北京 100035;3.国家康复辅具研究中心附属康复医院矫形外科民政部人体运动分析与康复技术重点实验室北京市老年功能障碍康复辅助技术重点实验室,北京 100176)
20 世纪中期,俄罗斯骨科医师加夫里尔·阿布拉莫维奇·伊里扎洛夫(Gavriil Abramovitch Ilizarov)研制了多用途环形外固定器,创建了治疗创伤与骨病的全新技术体系,其发现的牵拉成骨(distraction osteogenesis,DO)生物学理论被公认为20世纪外科领域最伟大的发现之一[1]。Ilizarov 技术于20世纪80年代推广至全世界,对于治疗严重肢体创伤、复杂畸形和骨搬运修复骨缺损等起到重要作用。在足踝外科领域,Ilizarov 技术同样成为治疗复杂畸形和创伤的重要手段,随着计算机辅助环形外固定器的出现,这一技术的应用方式有了更大的发展。
1 计算机辅助环形外固定器的发展史
Ilizarov 外固定器对于轴向畸形矫正的优势显著[2-10],可以根据畸形的位置安放铰链,从而达到满意的治疗效果[4-7]。对于复杂畸形的矫正,医师常需要耗费很多时间对环形外固定器结构进行多次调整以达到最佳的治疗效果,但对于扭转、平移畸形的矫正非常困难[5-11]。为了解决这个问题,查尔斯·泰勒(Charles Taylor)和哈罗德·泰勒(Harold Taylor)于1994 年设计了一种新型的计算机辅助六轴环形外固定器,简称为泰勒空间外固定器(Taylor spatial frame,TSF)[12]。TSF 是在Ilizarov 外固定器的基本构造和基础上,结合了Stewart 平台的原理,使用六根首尾相连的撑杆连接调整环,通过计算机软件精确计算调整数据,从而达到多平面畸形的同步矫正[7,9,10]。而不需要调整结构[13-15]。因此,与Ilizarov 外固定器相比,TSF 在多平面复杂畸形的调整上具有优势。
1995 年泰勒完成了第一台TSF 手术,并于1997年获得了TSF的专利。2002年,基于网络的TSF软件开始推向市场,并且在随后近20 年做出了多次改进和完善。目前,市场上有多种计算机辅助环形外固定系统,但是应用最广泛的还是TSF。
2 TSF的原理
掌握畸形矫正的原则和理解TSF 的基本结构是完成TSF矫形手术的前提。标准TSF由2个全环或2/3 环和6 个伸缩撑杆组成(图1),通过调节撑杆的长度达到两环的最佳摆放位置。术后医师需要输入软件的内容包括计算畸形参数、安装参数和框架参数3组数据。畸形参数显示原始和矫形后的状态,一般是通过术前正侧位X线片测量成角和移位畸形,通过临床查体结合CT 测量旋转畸形;安装参数用来确定参考环和原点之间的位置关系;框架参数用来确定环的大小和伸缩杆的初始长度。最后,医师还需要在软件中输入风险结构,也就是矫形过程中骨组织和血管神经中最可能被牵拉损伤结构的位置,并且选择正确的矫正速度,从而计算出最佳的调整周期,并将六根撑杆的初始刻度和最终刻度均匀分割成相应的天数,获得最终的调整方案。

图1 标准TSF的基本构型
3 TSF在足踝矫形手术中的应用
TSF可用于各种先天和后天足踝畸形的治疗,可以通过不同的组合方式制定出适合的治疗方式,从而达到最佳的治疗效果。以下是有几种常见组合(图2)。
3.1 常规踝构型(图2A,2个环连接6个伸缩撑杆)
常规踝构型简单而实用,可以有效治疗重度马蹄内翻足,增加背伸角度。此外,对于部分踝关节僵硬或已融合的患者,如果畸形的顶点位于踝上水平,使用常规踝构型进行踝上截骨加向后成角手术也是一种矫正足踝畸形的有效办法,从而达到跖行足的目的[16,17]。目前,Ponseti 石膏是先天性马蹄内翻足的标准治疗手段,错过最佳治疗时期的大龄儿童或成人马蹄内翻足畸形矫正非常困难,在常规踝构型基础上演化出的Ponse-Taylor 构型利用Ponseti 石膏矫正原理结合TSF 对被延误治疗的马蹄内翻足畸形进行两个阶段的矫正治疗(图3):第一个阶段将距骨和胫骨远端作为一个整体,将足的其余部分相对距骨调节,矫正足内收和后足内翻;第二个阶段将距骨和足部其他部分作为一个整体,相对胫骨远端调节,进一步矫正踝关节跖屈,从而恢复跖行足。
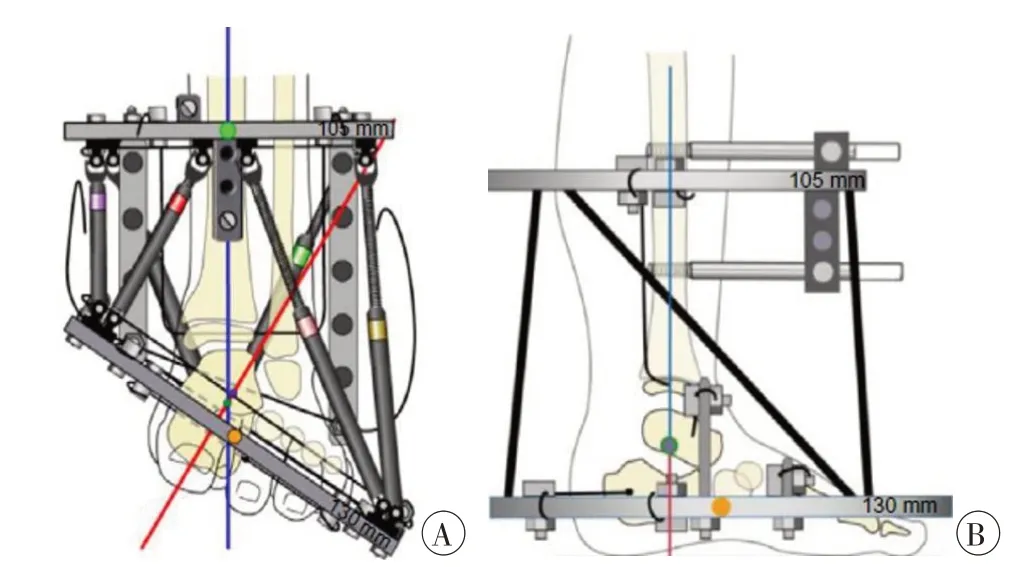
图3 Ponse-Taylor环形外固定器的基本结构(经授权使用,版权归Rubin institute for advanced orthopedics)
3.2 斜接串联构型(Miter构型,图2B,6×6)
斜接串联构型由2 个全环、1 个2/3 环和12 个伸缩撑杆组成,最近端以全环固定在胫骨上,中间环为开口朝前方的2/3 环,此环通常固定在跟骨和距骨上,第3 个环通常为全环,固定前足。近端两个环组成的单元一般可以矫正踝关节部位的畸形,例如马蹄内翻足畸形。远端两个环组成的单元可以解决中足的畸形,例如高弓、内收或旋后畸形。
3.3 对接串联构型(Butt构型,图2C,6×6)

图2 足踝部常用TSF构型
对接串联构型由1 个大致平行于胫骨方向的U形板为基础,在前足和后足各连接1个全环或2/3环,外加12 个伸缩撑杆组成。与斜接串联构型类似,对接串联构型在矫正多顶点畸形上有很好的效果。对接串联构型也可以只用前足或后足的一半构型(单Butt构型),如矫正糖尿病足的中足畸形。一般而言,中足截骨是做好对接串联构型尤为重要的环节,可以通过线锯或骨刀来完成。对于单Butt构型,连接前足或后足的远端环是相对困难的步骤,可以先固定前足或后足的远端环,然后再连接伸缩撑杆,最后固定近端环,以保证足够的空间位置。采用标准的对接串联构型时,由于空间限制,固定前足或跟骨的半针或全针常无法直接连接到远端环上,一般需要使用延伸立柱转接。
3.4 并联构型(图2D,6+6)
与对接串联构型类似,并联构型也是将前足和后足作为两个独立的调整单元,分别相对于胫骨为基准进行调整移位。并联构型的伸缩撑杆方向一般是沿着小腿长轴方向,适用于对长度正常的足进行垂直足底方向的调整,如马蹄足和内外翻等;而对接串联构型的伸缩撑杆方向垂直于小腿长轴方向,适用于对长度较短的足进行沿足底方向的调整,如足部延长同时调整足弓的高低和前足的内收、外展等。两种构型对于空间要求较高,需要丰富的TSF使用经验,否则容易出现无法连接合适长度的伸缩撑杆或后期调整过程中立柱、环片和伸缩撑杆之间的互相撞击阻挡。
4 TSF在足踝创伤手术中的应用
环形外固定器在治疗足踝创伤方面有一定优势,尤其是开放性骨折不适合采用内固定治疗时,或者pilon 骨折等软组织损伤非常严重时[18],环形外固定器具有保护软组织、减少感染发生率以及患者可以早期负重等优点。TSF 和Ilizarov 外固定器都是基于Ilizarov技术治疗外伤后畸形,一般认为3个半针和1 个张力钢针可提供最低稳定性标准。随着骨折的逐渐复原,逐渐移除半针和钢针,从而达到动力化而预防再次骨折。应用TSF治疗骨折时,可以采用两种不同的办法进行安装:①环先法,每个环都独自安装并垂直于骨段(近端环垂直于近骨段,远端环垂直于远骨段),手法将两环恢复至平行以复位骨折,然后再通过6个伸缩撑杆连接2个环,最后通过电脑计算将骨折残留畸形进行微调复位;②改良环先法,先用6个伸缩撑杆连接2个环,但伸缩撑杆并不锁上,然后每个环独自安装并垂直于骨断段(近端环垂直于近骨端,远端环垂直于远骨端),然后锁紧伸缩撑杆,最后通过电脑计算让两环逐渐牵张至两环平行,复位骨折[19,20]。
5 Ilizarov外固定器和TSF在足踝部的应用比较
Ilizarov 技术从20 世纪80 年代开始在世界范围内得到推广和应用,对肢体矫形和肢体延长学科做出了重要贡献[21]。在过去二三十年间,从最初的单边外固定器、环形外固定器到计算机辅助环形外固定器,凸显了科技在矫形外科的重要作用。过去十年间,越来越多的文献报道TSF在足踝矫形中的应用经验,足以说明TSF在足踝外科越来越受欢迎和重视。
Ilizarov 外固定器在足踝矫形的应用已经非常成熟,TSF 能否达到同样甚至更优的效果,学术界尚有争议。两者均为矫形的工具,原理和理念均基于经典Ilizarov 技术的DO 生物学理论,但两者各具特点。TSF 相较Ilizarov 外固定器的优势:①Ilizarov 外固定器矫正轴向扭转和侧向平移畸形有一定困难[22],常需更换铰链改变构型,对于足踝部位而言,构型调整更为复杂,而TSF 和TL-Hex、Ortho-SUV 等其他六轴外固定器的最大优势是省去了构型调整。只要是单顶点的畸形,无论三维畸形多么复杂,即使有轴向扭转和侧向平移,TSF的构型也无需改变。②Ilizarov外固定器对于铰链点的安放和推拉方向有严格要求和讲究,调整过程中如果偏差过大可能出现侧向移位或轴向压缩,足踝部位的矫形多为跨关节的,这种侧向移位或轴向压缩很可能导致关节脱位或软骨挤压而造成严重后果。如马蹄内翻足的矫正过程容易出现前脱位,Ilizarov 外固定器常需改变构型或推拉方向来解决,而TSF只需在软件中加入侧向平移的参数更新方案即可轻松解决。③TSF 可以出具带有明确日期及读数的方案,患者调整更为容易且不易出错,随访复查也更为简单,可以减少术后住院时间。而Ilizarov 外固定器由患者自行调节的难度大,可能会延长住院时间。
TSF 相较Ilizarov 外固定器的劣势:①空间排布:TSF的矫形严格要求基本单元是2个全环或2/3环首尾连接6 根伸缩撑杆,不可使用半环,杆的数量位置也不能随意更改,不如Ilizarov 外固定器自由灵活,对空间要求更大。在股骨、胫腓骨等长骨畸形中并不凸显,而足踝部的空间狭小并常有多处畸形,需要连接两套及以上的TSF,穿针、连接环片、安放撑杆时容易互相牵制和影响。安装好环片后使用最短的撑杆都无法连接,或是勉强连接后调整过程中杆的长度需要调整至59 mm 以下,而此时软件无法完成调整,常见于TSF 对接串联构型或TSF 斜接串联构型;TSF 并联构型的前足和后足环片或立柱之间容易发生撞击而阻碍调整。糖尿病足或创伤后遗症畸形的足大小正常、空间够用,而先天足畸形的足本身就很小,且多套TSF 安装起来更有难度,常需要根据不同畸形顶点用单套TSF 分步调整。②踝关节活动:TSF 在完成矫形后进行踝关节活动并不容易,TSF 常规踝构型可采取松开快装连接撑杆的锁扣进行活动,但无法保持踝关节在牵开状态,有可能造成软骨挤压,且患者疼痛常较为明显,应更换铰链进行活动;TSF 对接串联构型、TSF 斜接串联构型或TSF并联构型要进行踝关节活动比较困难,常需要长时间跨关节固定,可能造成术后关节僵硬。③负重行走:除TSF 常规踝构型,TSF 对接串联构型、TSF 斜接串联构型或TSF 并联构型在矫形过程中很难下地负重行走,容易造成骨质疏松。④拍摄X 线片:TSF 无需安装实体铰链,其使用的是X 线片测量的虚拟铰链,因而对摄片要求很高。股骨、胫腓骨等长骨矫形时空间开阔,X 线遮挡不严重,容易定位虚拟铰链,相比Ilizarov 外固定器的实体铰链更为准确;足踝部位如果采用两套以上的TSF,狭小的空间范围有大量金属遮挡物,很难看清骨质和关节轮廓,而且严重畸形的足部在摄片时难以投照到正常角度,造成虚拟铰链定位困难,可能反而不如Ilizarov 外固定器的实体铰链准确。⑤花费:通常情况下,TSF 相比Ilizarov外固定器价格更高。
Ilizarov外固定器和TSF因其自身结构和原理的不同,在足踝矫形中各有所长。Ilizarov外固定器用于足踝矫形的效果已毋庸置疑,而TSF在足踝矫形的应用指征仍在探索之中。对于足踝的单顶点畸形(如单纯的马蹄内翻足畸形),TSF常规踝构型的矫形能力确实不亚于Ilizarov外固定器,但在矫形过程中如何活动踝关节仍有待进一步探索改进;对于多顶点畸形,想要通过TSF串联构型或TSF并联构型进行矫形而达到类似Ilizarov外固定器的效果,仍需临床上的进一步探索和研究。因此,TSF在足踝应用的优缺点需要正确、客观的认识,合理掌握正确的适应证,进一步改良其矫正复杂足踝畸形的效果。
猜你喜欢
昆明医科大学学报(2022年9期)2022-11-19
中国修船(2022年4期)2022-10-13
机械科学与技术(2022年8期)2022-08-30
汽车实用技术(2021年10期)2021-06-04
舰船科学技术(2021年4期)2021-05-17
民用飞机设计与研究(2019年2期)2019-08-05
文物鉴定与鉴赏(2019年8期)2019-06-11
科技视界(2019年2期)2019-03-25
北京汽车(2019年6期)2019-02-12
北京汽车(2018年4期)2018-09-08
