基于改进PSO的对角加载波束形成算法
2021-09-25 06:20:52吴宝东蒋智辰
舰船电子对抗 2021年4期
吴宝东,蒋智辰
(中国船舶重工集团公司第七二三研究所,江苏 扬州 225101)
0 引 言
自适应波束形成(ABF)本质上是一种空域滤波技术,ABF根据一定的准则对波束形成器的权矢量进行优化设计,使得优化后的阵列波束主瓣指向期望信号,同时在空域中其他干扰方向产生零陷,以最大可能地对干扰信号进行抑制。作为阵列信号处理中的一个重要研究方向,ABF已被广泛应用于雷达、电子战、无线通信和射电天文等众多领域[1-2]。
在接收数据协方差矩阵和期望信号导向矢量精确已知的理想情况下,标准Capon波束形成器(SCB)可以获得理论最优性能。然而在实际应用中,阵列校正误差、快拍数限制、波束指向误差等因素会造成协方差矩阵和期望信号导向矢量偏离理想值,导致SCB性能急剧下降,特别是当训练数据中包含期望信号时,SCB会出现严重的信号自消现象[3]。为了改善SCB在误差存在非理想情况下的性能,国内外学者提出了一系列稳健的ABF算法。文献[4]、[5]提出的基于导向矢量不确定集方法是通过将期望信号导向矢量误差约束在各种不确定集中,使导向矢量出现误差时具备更强的稳健性,并获得较为理想的波束形成性能,但是不确定集大小设置误差的存在使得该类方法只能在一定程度上保证算法稳健性;基于协方差矩阵重构的方法是另外一种研究广泛的稳健波束形成算法[6-9],该类方法通过重构干扰加噪声协方差矩阵的方式消除期望信号的影响,并通过求解二次约束凸优化问题修正导向矢量,虽然能够获得较好的性能,但是存在运算量大、工程实现困难的缺点;对角加载方法通过对估计得到的协方差矩阵增加对角噪声矩阵的方式增加算法的稳健性,具有明确的物理和数学意义,但是加载量的选取对该类方法的性能影响较大,加载量过大会降低对干扰信号的抑制,过小时性能改善不明显,如何确定最优的对角加载量是当前研究的难点[10-15]。
针对上述问题,本文首先对加载因子与协方差矩阵特征值的关系进行分析,利用协方差矩阵特征值谱的分布特性对加载因子的取值范围进行约束,然后将粒子群优化(PSO)算法引入对角加载波束形成领域,利用PSO的全局搜索能力对加载因子进行全局寻优,同时针对传统PSO搜索步长固定的问题,提出一种自适应变步长迭代方法以提升其收敛速度。最后采用仿真数据从输入信噪比、快拍数、估计误差等维度对所提方法的波束形成性能进行评估。
1 阵列信号模型
考虑由M个全向阵元组成的均匀线阵,阵元间距为d<λ/2,λ为波长。假设远场空间中存在1个窄带期望信号xs和L个窄带干扰信号xi(i=1,2,…,L)照射到阵列,这L+1个窄带信号互不相关,则t时刻阵列接收信号可以表示为:
x(t)=xs(t)+xi(t)+xn(t)=
(1)


根据式(1)可以得到接收数据的协方差矩阵R:
R=E[(xs(t)+xi(t)+xn(t))(xs(t)+
xi(t)+xn(t))H]=
(2)
式中:Rs为期望信号协方差矩阵;Rj为干扰信号协方差矩阵。
在最大输出信干噪比(SINR)准则下,SCB问题可以转化为式(3)所示的优化问题:
(3)
式中:w为待优化的权值向量;Rj+n=Rj+Rn为干扰噪声协方差矩阵。
根据拉格朗日乘子法对式(3)进行求解,可以得到最优权值向量:
(4)

2 PSO-RCB算法
2.1 稳健波束形成算法
为了克服上述问题,文献[11]提出一种稳健Capon波束形成算法(RCB),其基本思想是对导向矢量误差进行约束,选择波束形成最大主分量对应的导向矢量作为真实导向矢量的估计值,从而增加了算法对估计误差的鲁棒性,RCB对应的优化问题可以总结为:
(5)

RCB从本质上属于对角加载算法的一种,只是将加载因子的设置转化为对导向矢量误差范围的设置。当ε较小时,对应的加载因子也小,此时RCB算法对噪声分量引起的协方差矩阵分散特性抑制性能较差,达不到波束形成需要的旁瓣抑制效果;反之又会导致在干扰方向的零陷降低,达不到干扰抑制的效果。
2.2 加载因子取值范围
对采样协方差矩阵进行对角加载可以得到:
(6)
式中:κ为加载因子;D为高斯随机矩阵,其元素服从均值为0、方差为1的高斯分布;η为描述协方差矩阵误差的正常数,η越大表明估计协方差矩阵与真实协方差矩阵之间的误差越大,波束形成性能越差。
利用矩阵求逆公式对式(6)进行分析可得:
(7)
从上式可以看出,等式右边第一项应尽量接近于R-1,即要求加载因子κ尽量小,同时等式右边第二项应尽量接近于单位矩阵:
(8)
根据上述2个因素,可以得到加载因子的范围为:
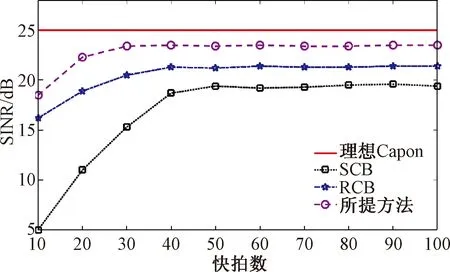
η<κ (9) 式中:下限η是满足式(8)的约束条件;R(i,i)可以保证(R+κI)-1尽量接近于R-1。 然而在实际中不可能获得真实的协方差矩阵,因此无法获得η和R(i,i)的真实值。对估计协方差矩阵进行特征值分解,可得: (10) 由于对角加载的出发点是对协方差矩阵的估计值进行修正,因此在上述分析的基础上将协方差矩阵特征值引入对角加载,利用特征值对加载因子的取值范围进行约束,即令κ的下限为噪声分量特征值谱的标准差,以保证波束形成旁瓣性能,κ的上限为干扰分量特征值谱的均值,以避免出现κ过大产生的干扰抑制性能下降问题。 (11) 式中:σstd(·)和λmean(·)分别表示求括号内变量的标准差和均值运算。 前述分析给出了加载因子的取值范围,但是没有明确如何选择最优的加载因子值,这里将PSO算法引入RCB,提出一种自动寻优方法,对加载因子进行优化。 PSO是当前应用非常广泛的一种随机搜索算法,具有较强的全局搜索能力,对随机误差不敏感且算法简单易实现。其基本思想是模拟自然界中鸟群觅食的行为,算法中每个个体被视为一个只有速度和位置信息的粒子,迭代过程中每个粒子的状态始终都是追寻当前种群中粒子经历的最佳位置,并且不断对自身的速度和位置信息进行更新,从而确保种群的运动由初始的无序发散状态逐渐向有序状态收敛,并最终找到全局中的最佳位置。该过程中,每个粒子按式(12)所示规则对自身速度和位置信息进行更新: (12) 对于传统PSO算法,惯性因子w通常被设置为常数。然而从式(12)可以看出,算法的收敛能力由w决定,w越大,算法的全局搜索能力越强,反之则算法的局部搜索能力越好。因此在算法迭代过程中,w不应为固定的,应随着迭代次数的增加而变小,从而保证在算法迭代初期,粒子距离最优位置较远时采用较大的w,以获得较快的收敛速度。而随着迭代的进行,粒子逐渐接近于最优位置,此时应采用较小w以提升搜索精度,因此本文对PSO算法进行改进,采用式(13)所示自适应变步长迭代方法: (13) 式中:t为当前迭代次数;T为总迭代次数;wmax为w的取值上限。 从式(9)可以看出,算法刚开始迭代时,t较小,w接近最大迭代步长,随着迭代次数的增加,t逐渐逼近于总迭代次数T,w随之减小。 根据上述分析,可以将本文所提基于改进PSO优化的对角加载协方差矩阵估计方法步骤总结为: 步骤2:根据式(10)对协方差矩阵进行特征值分解; 步骤3:根据式(11)计算得到加载因子的取值下限和取值上限; 步骤4:将加载因子作为PSO的粒子,加载因子的取值范围作为粒子搜索空间,根据式(12)和式(13)进行PSO算法迭代; 步骤5:利用得到的最优加载因子κ*进行对角加载,得到最优权向量为: (14) 通过构建4组仿真实验从不同维度评估所提方法的性能。仿真过程中,采用阵元间距为半波长的10元均匀线阵,空间中存在3个互不相关的远场窄带平面信号入射到阵列,其中10°方向的入射信号为期望信号,45°和50°方向为干扰信号,干信比为20 dB,阵列通道噪声为0均值的高斯白噪声并且与期望信号和干扰信号相互独立,信噪比设为10 dB,快拍数设置为100,所有试验结果都是开展100次蒙特卡洛试验并进行统计的结果。仿真中在相同条件下同时采用标准Capon波束形成(记为SCB)和稳健波束形成(记为RCB)进行对比。 由于实际工程应用中,通常难以获得非常精确的观测方向值,因此需要波束形成算法对观测方向误差具有一定的鲁棒性。在本次试验中,假设存在3°的观测方向失配,即期望信号的真实入射方向为10°,而观测方向为13°。图1给出了3种Capon波束形成算法得到的方向图,其中SCB和RCB分别表示存在3°的观测方向失配时2种方法得到的方向图。从图1给出的结果可以看出,SCB方法虽然能够在干扰方向形成零陷,但是期望信号方向同样出现了抑制,表明SCB方法出现了较为严重的自消问题;RCB方法能够指出真实的期望信号方向,但是与所提方法进行对比可以看出,在干扰方向RCB方法的零陷略浅,表明所提方法的干扰抑制能力要优于RCB方法。图1的结果表明本文所提方法与理想Capon方法的性能最接近,能够准确指向期望信号的真实方向,对干扰信号具有较强的抑制能力,且具有较高的旁瓣性能。 图1 不同方法波束形成方向图 图2给出了不同方法的输出SINR随着输入SNR的变化曲线,仿真中假设依然存在3°的观测方向失配,快拍数为100,输入信噪比范围为-15 dB到30 dB,步长为5 dB,在每个SNR条件下分别进行100次蒙特卡洛试验,并对结果进行平均。从图2可以看出,由于SCB无法解决期望信号观测方向失配问题,因此SINR远远偏离理论值,并且随着SNR的增大而逐渐恶化。RCB方法虽然不受观测方法失配问题影响,但由于协方差矩阵中含有期望信号,因此当SNR逐渐升高时,性能出现了下降。所提方法降低了期望信号和扰动干扰的影响,输入SINR最接近于理论Capon。 图2 输出SINR随输入信噪比变化曲线 实际工程应用中,在尽量少快拍数条件下实现波束形成对于提升系统鲁棒性和系统响应时间具有重要意义。图3给出了不同方法的输出SINR随着快拍数的变化曲线,仿真中假设依然存在3°的观测方向失配,输入信噪比为10 dB,快拍数的变化范围为10~100,步进为10,在每个快拍数条件下分别进行100次蒙特卡洛试验,并对结果进行平均。从图3可以看出,本文所提方法在快拍数为30时实现了收敛,且输入SINR接近于理论值,RCB方法在快拍数为30左右时也实现了收敛,但是其输入SINR与理论值存在明显差距,性能不及所提方法,SCB方法受观测方向失配的影响,性能要差于RCB方法。 图3 输出SINR随快拍数变化曲线 图4给出了不同方法的输出SINR随着期望信号导向矢量失配角的变化曲线,仿真中快拍数固定为100,输入信噪比设置为10 dB,期望信号导向矢量失配角变化范围为-10°到10°,步进2°,在每个失配角条件下分别进行100次蒙特卡洛试验,并对结果进行平均。从图4可以看出,SCB方法输出SINR受失配角的变化影响较大,当失配角增大时,SINR出现了明显的下降;当失配角在8°以内时,RCB方法和所提方法均能够正确指向期望信号真实方向,但是所提方法的SINR要更接近于理论值,因此性能优于RCB方法;当失配角大于8°时,RCB方法和所提方法的SINR均出现了下降,表明此时2种方法也不能完全对准实际期望信号方向。 图4 输出SINR随失配角变化曲线 对角加载自适应波束形成算法加载因子的选取对波束形成性能影响较大,加载因子过小时,波束形成旁瓣性能较差;加载因子过大时,对干扰的抑制性能较差。针对该问题,本文提出一种基于改进PSO算法优化的对角加载方法,利用协方差矩阵特征值谱分布特性确定加载因子的取值范围,然后将加载因子作为PSO算法的粒子,采用改进PSO算法进行全局寻优。仿真试验从导向矢量存在误差、不同输入信噪比和快拍数等方向对所提方法、SCB方法和RCB方法进行了对比,结果表明所提方法对误差更稳健,波束形成性能更优。
2.3 改进PSO算法

2.4 改进PSO优化加载因子
3 仿真分析
3.1 试验1:存在观测方向误差时的方向图

3.2 试验2:输出信干噪比随输入信噪比的变化

3.3 试验3:输出信干噪比随快拍数的变化
3.4 试验4:输出信干噪比随期望信号导向矢量失配角的变化

4 结束语
猜你喜欢
通信技术(2019年3期)2019-05-31 03:19:08
数学年刊A辑(中文版)(2018年4期)2019-01-08 02:00:24
电子测试(2018年6期)2018-05-09 07:31:54
声学与电子工程(2017年1期)2017-06-22 11:30:09
自动化学报(2016年8期)2016-04-16 03:38:55
无线电通信技术(2015年3期)2015-12-23 11:37:00
四川师范大学学报(自然科学版)(2015年4期)2015-02-28 14:08:20
中国科学技术大学学报(2013年8期)2013-03-11 20:18:37
湖南师范大学自然科学学报(2013年5期)2013-03-11 16:25:55
文山学院学报(2012年6期)2012-03-25 13:07:52