
基于触觉提示的行车环境预警方案设计
2021-09-24 11:17阚延鹏张师榕汪步云
黑龙江工业学院学报(综合版) 2021年7期
阚延鹏,张 振,陈 玉,张师榕,汪步云
(安徽工程大学 机械工程学院,安徽 芜湖 241000)
根据英国皇家事故预防学会的数据,高达20%的交通事故是由于疲劳、开车时接到电话或与他人交谈,导致车辆偏离原行驶轨迹,其中四分之一是致命的严重事故。驾驶员辅助和防撞系统能为驾驶员提供访问车辆信息的功能,但主要依靠视觉(约占80%)和听觉信息等控制车辆,驾驶员在视觉和听觉的交互辅助作用下能够有效地避免一些事故的发生,但这些方法仍存在一些不足。驾驶室通常有多个灯光操作提示装置,当灯光提示装置工作时,驾驶员在驾驶时需要不断转动头部来调整视野。时刻注意提醒灯会带来视觉疲劳,分散驾驶员注意力,带来安全隐患。在一些紧急情况下,不允许驾驶员进行扭头观察,听觉警报当然是非常有效的,其不需要特定的安装空间,但当在车内播放音乐、声音环境复杂时,听觉警告的有效性会大大减弱。研究表明,当驾驶员注意力不集中或处于疲劳驾驶时,视觉和听觉的预警信号往往会导致驾驶员做出错误的判断[1]。触觉是一种比较好的交互方式,能够直接向人类的身体传递信息。将触觉提示应用于行车环境预警能减少驾驶员对警告的响应时间且不易被其他干扰因素所消弱。它能更直接、更安全、更迅速地对驾驶员进行提醒。将这种装置安装在特定位置上,让其始终与驾驶员的某一部分保持接触,以提供诸如手指、腰部或背部等触觉提示,其不需要驾驶员以冗余动作接收提醒。尽管触觉在感知车辆的加速和振动方面起着重要作用,但它提供的有关车辆的信息仍然太少,这说明触觉反馈在汽车安全驾驶中的应用有待发展。
1 触觉预警方式研究现状
触觉预警一般是通过振动座椅和触觉方向盘以对应刺激不同的身体部位来实现,不同的身体部位其受振灵敏度和阈值也不相同,灵敏度最高的是手部,最差的是臀肌[2]。基于该原理、多种用于驾驶辅助的触觉预警装置也被开发出来。Hogema[3]提出的一种嵌入在汽车座椅上的8×8触觉阵列用于编码8个不同的方向作为驾驶辅助设备,通过在平整路面和砖路振动条件下进行现场研究。结果表明,触觉座椅提供了一个良好的方向信息,其正确提示率可达92%。Capallera[4]提出了一种触觉振动座椅,分别安装两个4×5振动阵列于靠背和座椅上。通过实验验证了使用该座椅传递信息的可能性,随着调整频率和振幅的变化,能向驾驶员传输障碍物和线路等有效信息。同样利用震动进行信息提示的还有文献[5-7]中所示的设备,田顺天[5]提出一种振动提示型安全座椅,可根据座椅振动的幅度去知晓汽车的各种状态和安全提示问题。Petermeijer, S. M[6]调查结果表明,通过驾驶员座位呈现的振动触觉刺激作为警示是有效的,但作为定向接管请求的有效性可能是有限的。Jan B.F[7]在驾驶模拟器上测试了一种由8个振动元件或牵引器组成的振动触觉显示器,结果表明,与视觉显示相比,触觉导航显示降低了驾驶员的工作负荷。尽管通过不同的座椅震动模式能传递不同的信息,但是因其灵敏度低、模式有限以及外在车身震动等因素仍不能达到最佳提示效果。振动方向盘则是另一种通过在方向盘上套设震动结构,在震动结构内设置震动模块。由于大脑对于触感比声音的解读时间更快,对于一些方向感较差的车主来说会更加直观,尤其是在环境比较嘈杂路上行驶时,方向盘上安装的振动提示装置可避免因漏听或漏看车载系统辅助提示导致的行驶错误或是交通事故[8]。Shakeri[9]提出了一种方向盘触觉提示装置,将6个螺线管嵌入在方向盘套中,以对用户手掌产生推压感,驾驶员可以靠区分方向盘上螺线管的排列图案传递信息,而不会降低驾驶性能或增加感知的心理负荷。通过实验验证,其识别准确率为81.3%。Patrizia[10]提出了一种利用方向盘的热导航装置进行转向提示,使转弯前200米的警告正确识别率达到94.2%,转弯正确率达到91.7%,是一种较为有效的触觉提示装置。由于现有部分车型多数配备方向盘加热功能,因此,该方案的使用受到一定的限制。尽管已有的设备及方式能够提供较好的驾驶辅助功能,但是其设置方案、方式及识别准确率还有提高空间。
2 预警方案的设计与实验设置
2.1 预警方案的设计
本文所提出的预警方案是将触觉反馈设备安装在方向盘上,当车辆的行车雷达与触觉反馈设备相结合时,通过设备推杆的高低排列以实时反映当前行车环境(障碍物、潜在危险位置),以较快的响应时间对驾驶员进行提示。为了验证预警方案的可行性,我们通过触觉反馈设备[11](如图1所示)结合Unity3D平台在虚拟环境下进行方案的模拟验证。
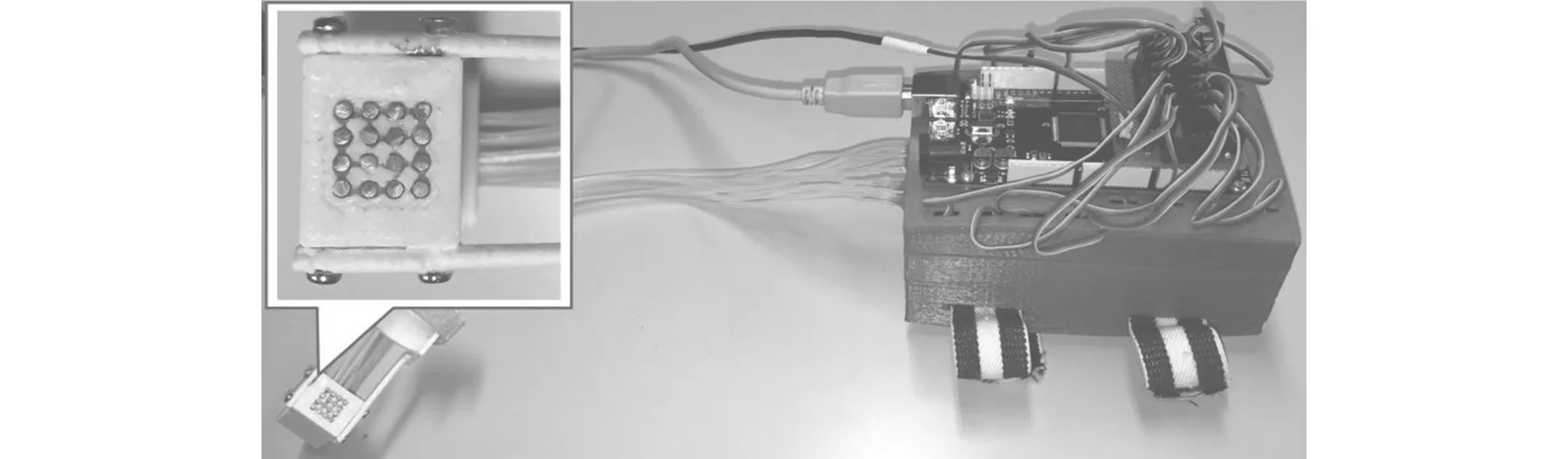
图1 触觉反馈设备
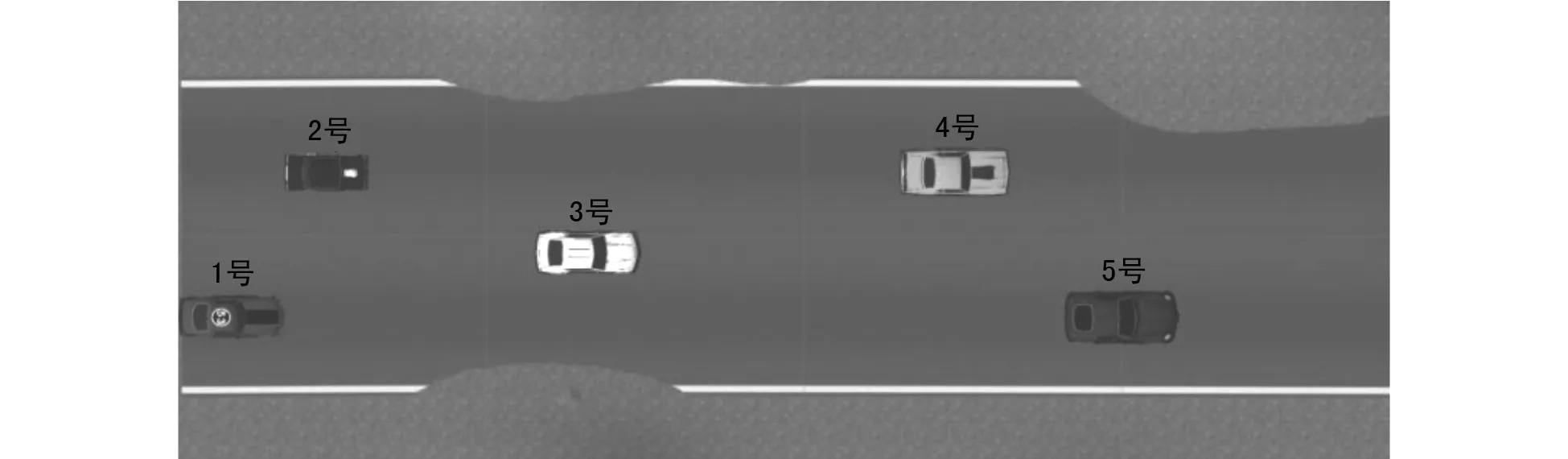
图2 虚拟环境初始化
2.2 实验设置
初始实验环境的配置如图2所示,通过设置5辆不同的车辆(根据真实车辆大小建模),其中3号车(长度:3.8m;宽度:1.7m)可通过键盘进行方向、速度控制,其他车辆会自动沿设定方向以一定速度移动。我们将设置的虚拟检测传感器设定在3号车的中心位置,其检测范围是以中心向外半径为3.2m的范围。当其他车辆进入虚拟传感器的检测范围时,表明3号车车身周围存在潜在危险,从而将潜在危险的方向和距离实时传输到触觉反馈设备上进行提示。虚拟传感器的检测区域与触觉反馈设备的推杆阵列对应关系如图3所示。
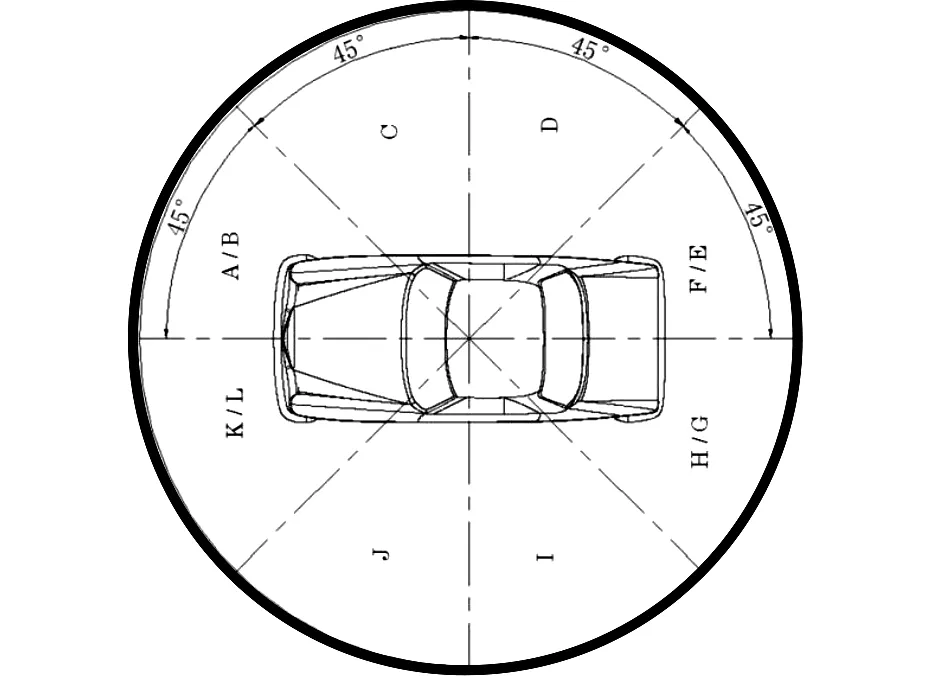
(a)车身周围检测区域划分
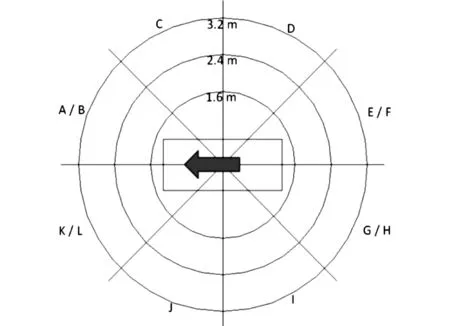
(b)检测距离与范围的模型图
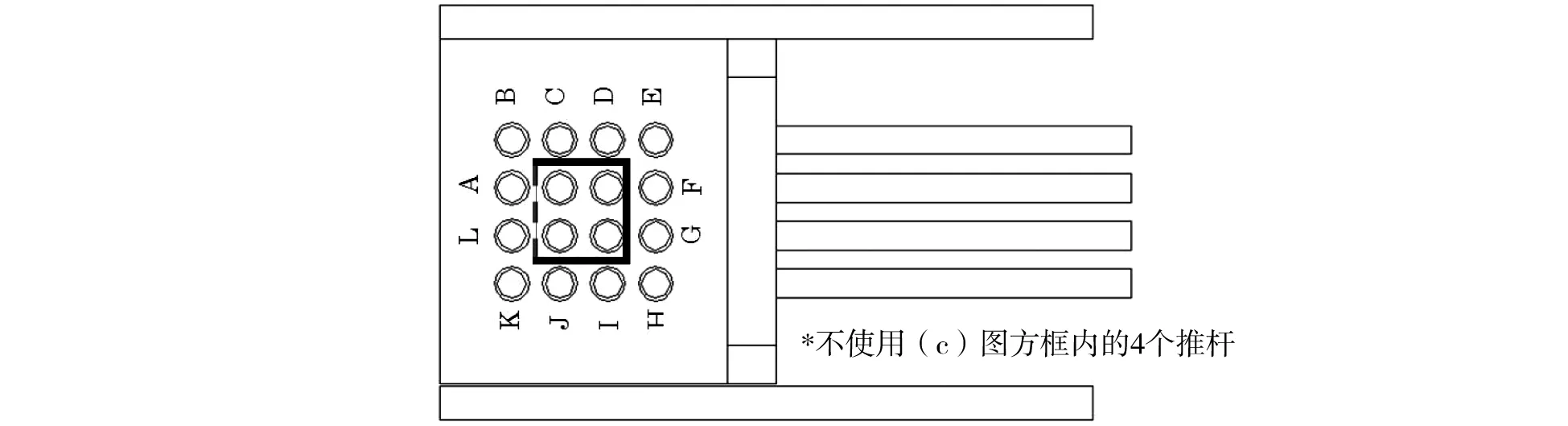
(c)检测区域与设备推杆的对应关系图3 虚拟传感器检测区域与触觉反馈设备推杆阵列的对应关系
我们将车身周围划分为8个区域(如图3(a)所示),为了较精准获取障碍物(潜在危险)所处位置,将每个区域对应45°的范围,分别对应12个推杆(如图3(b)(c)所示)。当车辆行驶时,驾驶员的盲区往往存在正前方或正后方,因此我们将这些区域划分为4个区域,共对应8个推杆进行重点提示,其对应关系如表1所示,而其余易察觉的区域划分为4部分。此外,根据障碍物(潜在危险)的远近距离,我们将推杆的伸出长度划分三个等级:1.5mm,3mm,5mm,分别对应的检测距离3.2m,2.4m,1.6m(如图3(b)所示)。因此,触觉设备将根据虚拟传感器所检测到障碍物(潜在危险)所处区域和距离两方面来提供触觉反馈。
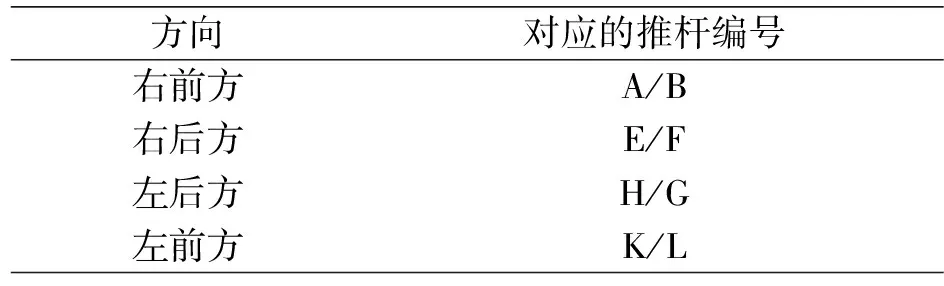
表1 前后方重点预警区域对应的推杆编号
3 实验与分析
我们邀请10位参与者(其中有2位女性)参与本次位置判断实验,参与者将触觉提示装置穿戴在右前臂并将食指放置在推杆阵列表面,当一名参与者进行实验的同时,另一名参与者则通过键盘控制虚拟环境中3号车随意行驶,使其与其他正常行驶的车辆产生不安全的距离或制造潜在危险。这样,用户便可感受到触觉提示设备的推杆带来的不同的排列。参与者通过感受推杆阵列带来的刺激,迅速指出当前车辆周围障碍物(潜在危险)所处的区域。实验开始前,我们向参与者详细介绍了实验的环境和目的,为了让参与者熟悉推杆阵列变化的高度与每个推杆对应的检测区域,每人进行15分钟的调整练习。
我们将此次的位置判断任务分为两部分,即单区域障碍和多区域障碍(如图4、图5所示)。单区域障碍中,我们将虚拟环境中所有车辆停止,在模拟环境中添加一个人物模型,当移动人物模型并放置在车身周围时,参与者仅通过触觉提示将人物模型当前所处的区域在纸上绘制出来,每位参与者执行20次。在多区域障碍中,为了防止刻意制造特定潜在危险位置,在Unity3D中,除3号车外,将其余车辆全部设置为不可见并按照既定的线路行驶。当3号车与其余隐形车辆产生潜在碰撞危险时,我们随机选择10个场景并暂停,暂停后,参与者须立刻在纸上画出当前所有危险区域。同时,我们将隐形的车辆全部设置可见,用于验证参与者所画出潜在危险区域的正确性。通过匹配的准确度来判断该应用的可行性并记录下参与者出现错误判断的原因。
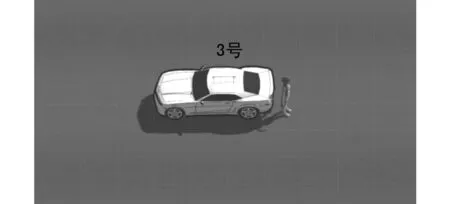
图4 单区域障碍设置

图5 多区域障碍设置
任务推测的准确度如表2所示,从实验结果可以看出,参与者基本可以通过触感迅速估计出潜在危险的区域。在单区域障碍中,参与者们正确判断该区域的平均准确率为81.5%。在多区域障碍中,参与者们正确判断这些区域的平均准确率为84.5%(实验中的一些对比图如图7所示)。

表2 任务推测准确度结果

图6 不同原因导致错误判断的比率
我们也对产生错误的原因进行了详细的分析。在单点区域障碍中,主要由两种原因构成。第一种是标记于相邻区域,由于只有单个推杆,触摸过程中缺乏参照物,推杆伸出长度的不同导致判断错误,由此导致的错误标记占总错误率的87.6%。第二种是标记于错误区域,主要是不善于在纸上把握距离而造成的。尽管参与者已经通过触觉判断了相近的位置,但标记在错误区域,由此造成的错误标记占总错误率的12.4%。

(a)

(b)
(c)

(d)图7 多区域存在障碍检测中行车位置与推杆排列形状
在多区域障碍中,总结出三种错误原因。第一种是参与者标记于相邻区域,通过分析,参与者最容易做出错误判断的是将C、D、I和J(车身的左右两侧)区域标注在B、E、H和K,这些错误数量占总数的47.5%。第二种为参与者遗漏部分标记,当车身一侧较近和另一侧较远距离处有潜在危险时,由于推杆伸出的高度差设置过大,而指腹变形量有限,参与者无法同时摸到高低两个推杆导致该错误的发生,由此导致的错误标记占总错误率的42.5%。第三种是错标于其他不相邻的区域,约占整体错误率的10%。
4 结论和展望
(1)实验结果表明,无论参与者是否发现车身周围的障碍物(潜在危险),触觉提示装置都能够稳定的、实时的提供潜在危险的距离和方向,产生相应的触觉刺激于用户指尖,也表明我们提出的触觉预警方案对用户有较强的可接受性和作用效果。
(2)实验中,由于参与者无法看到设置的隐形车辆,全凭触觉反馈进行区域的判断就能达到较高的准确率。现实生活中,若驾驶者凭借触觉结合已有的视觉、听觉提示,能解决单一提示下响应时间、判断误差以及噪音等因素,会更加准确的定位潜在危险的位置,会带来更好的提示效果[12]。
(3)本文的结果可应用于汽车安全辅助系统研究,也为其它行车预警系统人机交互方式提供一定的参考。
本文验证了触觉提示用于车辆行驶中为用户提供实时环境安全预警的可行性,并表明驾驶员可以使用触觉提示较准确的判断车身周围的环境,而不仅仅依赖于传统的视觉和听觉提示。在仅凭借触觉提示下,对障碍物(潜在危险)的判断准确率达到81.5%以上。在未来的工作中,我们将会改进触摸方式,使用左右手同时触摸,并将推杆安装在方向盘上。这将会增加触觉信息感知的准确性并为用户带来更好的提示效果。
猜你喜欢
当代水产(2022年6期)2022-06-29
汽车实用技术(2022年7期)2022-04-20
东北大学学报(社会科学版)(2022年1期)2022-02-17
海外星云(2021年6期)2021-10-14
兵器装备工程学报(2020年12期)2021-01-12
新传奇(2018年47期)2018-08-09
专用车与零部件(2018年1期)2018-03-25
红豆(2017年4期)2017-04-13
科技创新导报(2016年4期)2016-11-19
演艺科技(2016年9期)2016-05-14
