
煤矿无轨胶轮车调度系统设计与应用研究
2021-09-23 12:15王瑜,康帆
能源与环保 2021年9期
王 瑜,康 帆
(西安航空职业技术学院,陕西 西安 710089)
我国整个能源结构体系中,煤炭资源发挥着举足轻重的作用[1]。根据相关统计数据表明,煤炭资源在整个能源结构体系中所占比例在40%~50%[2]。矿井中开采得到的煤矿物料需通过运输系统输送到指定位置,无轨胶轮车是煤矿中比较重要的辅助运输系统,与有轨运输系统相比较,其运输更加灵活,可以充分结合煤矿生产实际情况进行灵活调整[3]。但是当矿井中使用的无轨胶轮车数量达到一定程度时,会显著增加矿井交通的难度。再加上矿井巷道本身比较狭窄,如果调度不当非常容易发生交通事故[4]。轻则产生交通堵塞,影响煤矿生产过程的连续性,重则产生严重的人员伤亡事故。针对该问题,有必要结合矿井实际情况,设计研究无轨胶轮车的调度系统,对矿井中运行的车辆进行有效调度,避免发生交通安全事故[5]。本文主要设计研究了无轨胶轮车的调度系统,并将该系统应用到煤矿生产实践中,取得了较好的应用效果,值得其他煤矿企业借鉴。
1 调度系统的整体方案设计
设计的煤矿无轨胶轮车调度系统整体方案如图1所示。考虑到无轨胶轮车工作时始终处于移动状态,因此需要基于无线通信技术对无轨胶轮车进行定位。具体而言,需要在整个矿井巷道范围内每间隔一定距离设置检测节点,在车辆上设置移动节点。移动节点以一定频率向外发射信号,位于巷道中的检测节点可以接收信号。根据信号的衰减程度,结合一定算法可以获得车辆的准确定位。另外,为了对无轨胶轮车运行状态进行检测,需要利用传感器对车辆运行速度和油温进行检测,由检测节点将这些数据信息向外发射。为了保障无轨胶轮车在巷道中的运行效率,需要在关键位置安装信号灯,司机根据信号灯指示行走,遵循红灯停、绿灯行的原则[6]。控制系统统筹井下所有车辆的运行方向、运行速度等数据信息,对信号灯进行控制,防止车辆在巷道中相遇发生碰撞或者影响交通效率。

图1 调度系统的整体方案Fig.1 Overall scheme of dispatching system
井下采集得到的所有数据信息通过工业以太网络传输到位井上部分的调度中心,且这些数据信息以可视化方式呈现在监控大屏上,以便工作人员实时掌握井下车辆的状态信息,必要时可通过人工方式对井下车辆进行调度。所有数据信息都要存储到服务器中,以便后续进行调取,需要存储的信息包括车辆运行速度、运行方向、上井和下井时间等。地面调度中心最重要的功能是结合车辆运行速度和位置信息,对井下所有的信号灯进行控制,即控制信号灯的颜色,实现车辆运行的控制。特殊情况下可通过人工方式对井下的无轨胶轮车进行调度,保障井下车辆和人员的安全。
2 巷道中无轨胶轮车的调度策略
2.1 调度基本思路
为了确保无轨胶轮车在煤矿巷道中的行车安全,在巷道中每间隔一定距离设置1个避车室。2个避车室中间的区间称为行车区间。避车室的作用是确保相向行驶的2辆无轨胶轮车能够安全会车。每个行车区间内都设置有很多检测节点,以便掌握该区间内车辆的具体位置。为了避免多车辆同时进入同1个避车区间或者行车区间,信号灯受到调度系统的控制。巷道行车区间的设置如图2所示。
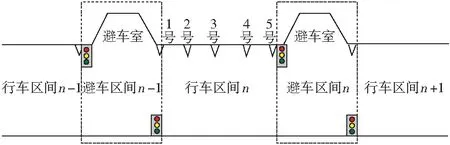
图2 巷道行车区间的设置Fig.2 Setting up laneway driving section
2.2 调度基本策略
矿井巷道实际情况非常复杂,但直行窄巷道是比较特殊的情形。以下主要以该情况为例,阐述巷道中无轨胶轮车的调度策略。当无轨胶轮车A即将进入某行车区间时,根据行车区间内的实际情况,可以划分成为以下4种情形,如图3所示。
(1)行车区间内无车,如图3(a)所示。如果行车区间内无车辆行驶,则两端的信号灯2和3全部亮绿灯,2个方向行驶的车辆全部可以直接通过该行车区间。一旦A车进入该行车区间后,两端信号灯立即变成红色,其他车辆不得驶入。但经过延时ΔT后,A车已经行驶一段距离,后侧的信号灯2变成绿色,车辆可以跟随A车驶入该区间。
(2)行车区间双向来车,如图3(b)所示。当两辆无轨胶轮车A、B同时驶入某行车区间两侧时,调度系统判断两辆车的优先级别。如果A车优先级更高,则信号灯2变绿,A车进入行车区间,信号灯3变红,B车进入避车室等待。

图3 狭窄巷道中会车的几种情形Fig.3 Several situations of meeting cars in narrow roadways
(3)行车区间内有同向行驶的车,如图3(c)所示。如果遇到行车区间前方存在行驶方向相同的车辆,后方车辆原则上可以直接驶入,但考虑到行车安全,要求两辆车之间保持一定的安全距离,这就涉及到行车区间的容量大小问题。调度系统如果判断该行车区间内的车辆数量未达到最大容量,则在保障前后车辆安全距离的情况下,信号灯2变绿,A车驶入行车区间。相反地,如果调度系统判断行车区间内车辆数量已经达到了饱和状态,则信号灯2变红,A车进入避车室等待。
(4)行车区间内有反向行驶的车,如图3(d)所示。信号灯2变红,A车直接进入避车室,等待B车通过行车区间后,信号灯2变绿,A车从避车室驶出进入行车区间。
巷道中无轨胶轮车的调度流程如图4所示。
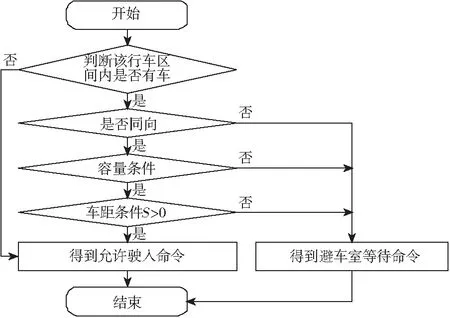
图4 巷道中无轨胶轮车的调度流程Fig.4 Dispatching flow chart of trackless rubber-tyred vehicles in roadways
由图4可知,当无轨胶轮车驶入某行车区间前,调度系统会进行一系列的分析、判断。比如需要分析行车距离内是否有车辆行驶,如果有车辆还要判断车辆行驶方向、行车区间最大容量、前后车辆之间的安全距离等。只有各方面条件均达到行车安全的情况下,车辆才能够驶入行车区间,否则进入避车室等待。
3 主要硬件选型及软件设计
3.1 主要硬件选型设计
由于无轨胶轮车调度系统是一个非常复杂的系统,中间涉及很多硬件设施,本文主要对一些关键和重要的硬件进行介绍。
(1)主站控制器选型。主站控制器位于矿井地面,作用是对井下所有采集得到的数据信息进行综合分析和处理,根据系统内置的算法给出对应的控制策略,并下达控制指令实现井下无轨胶轮车的安全调度。结合实际情况,选用610-H/L型控制器[7]。此型号控制器具有非常丰富的I/O接口,可以与多种其他类型的硬件设施实现连接。数据交换方式也比较丰富,同时支持RS485、RS232和工业以太网的通信模式,完全可以满足调度系统的实际使用需要。
(2)井下分站控制器选型。井下分站控制器的作用是根据检测节点采集得到的信息,对井下车辆位置进行分析判断,同时还要与主站控制器进行联系,实现数据信息的交互,如根据主站控制器指令对信号灯进行控制等。选用S7-200型PLC控制器[8]。该型号控制器具有优越的性能,在工业领域有广泛应用,具有很强的运行稳定性,可以适应复杂的工作环境。I/O接口丰富,可以同时处理不同的任务。分站控制器供电模块原理如图5所示。
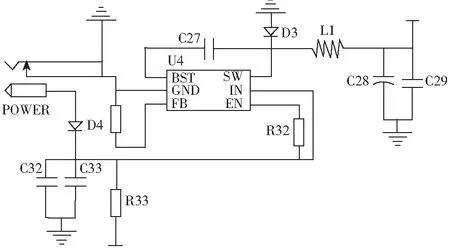
图5 分站控制器供电模块原理Fig.5 Schematic diagram of substation controller power supply module
(3)车辆定位模块选型。主要包含车载节点和检测节点。检测节点安装在矿井巷道不同位置,车载节点安装在无轨胶轮车上。由于车辆工作时始终处于移动状态,因此车载节点和检测节点之间需要通过无线传输技术实现数据传输。本调度系统采用的是ZigBee无线传输技术[9],节点模块使用的芯片为CC2530型,该芯片具备有RF收发器,不仅可以发送信号,还可以接收信号。以CC2530芯片为核心,再配合使用其他相关硬件设施共同构成了检测节点和车载节点。每个节点都有固定的ID编号,特别是车载节点编号与对应的无轨胶轮车相匹配。车载节点向外发送数据信息时同时会发送对应的ID编号。检测节点获得数据信息后,通过分析ID编号即可判断数据属于哪辆无轨胶轮车。检测节点通过RS485总线通信模式实现与井下分站之间的联系,将采集到的数据信息传输到分站中进行分析。车辆定位模块内部及其与分站之间的通信模式如图6所示。
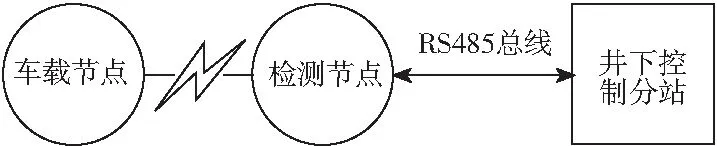
图6 定位模块内部及其与分站之间的通信Fig.6 Communication between positioning module and substation
(4)车辆信息检测模块。煤矿井下工作环境复杂,为了保障井下无轨胶轮车运行过程的安全性,需要对车辆相关信息进行实时检测,其中最重要的检测数据包括油温和行进速度。如果检测发现超过了安全数值,调度系统会立即发出警报以提示驾驶员。系统选用柴油机保护检测模块(YE0.3-24)[10]。该设备可以在-20~80 ℃正常工作,工作时的电压和电流分别为DC 15~30 V、300 mA。温度监测范围和车速检测范围分别为0~160 ℃和0~150 km/h。
3.2 调度系统软件设计
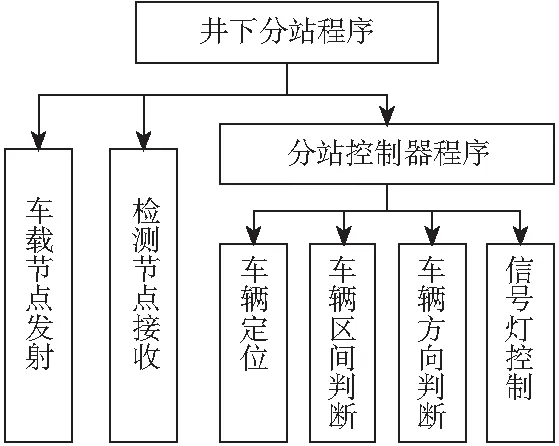
图7 井下分站软件基本组成Fig.7 Basic composition of underground station software
车载节点搭设在无轨胶轮车上,首先需要利用各种传感器采集车辆运行状态数据信息,包括油温和运行速度等,然后利用发射节点将包括车辆编号ID在内的车辆基本信息通过无线网络传输到检测节点。检测节点接收到相关信号后,联通信号的衰减值一同发送到分站,通过分站传输到控制器中进行处理。分站控制器获得数据信息后,基于内置算法对车辆位置进行计算,同时判断车辆的行驶方向、相关行车区间的容量是否超标等,另外,还需要根据主站的综合判断结果对行车区间两侧的信号灯进行控制,并将结果反馈到地面主站。
(2)地面主站软件设计。井下分站和地面主站之间通过工业以太网实现数据信息交互。地面主站获得数据信息后,首先要对数据进行存储,还要对数据进行显示,便于工作人员可以实时掌握井下车辆基本情况。更重要的是数据信息进行处理分析,判断井下无轨胶轮车的运行状态并下达控制指令。实现车辆调度的效果。主要包含以下3个方面软件程序:①通信程序。井下分站和地面主站之间的距离较长,如何实现数据信息的安全可靠交互是关键问题,是保障调度系统运行的基础,软件程序就发挥着重要作用。通信程序工作时,在地面主站分别按照井下分站的网络地址进行检测,查看网络是否正常连接。如果检查发现网络连接存在异常,会在监控大屏上显示故障问题。②车辆信息处理程序。作用是对井下所有车辆数据信息进行分析处理,判断车辆的行驶速度、具体位置等,并结合每个行车区间情况对井下所有信号灯进行控制,达到车辆调度的目的,所有车辆信息以及信号灯控制情况在监控大屏上进行显示。为了保障井下所有无轨胶轮车的数据都可以被采集到,需要分析井下车辆的数量是否与实际情况相匹配。③人工干预程序。正常情况下调度系统可以实现自动化运行,但在特殊情况下需要通过人工干预。其一,为了满足局部区域的个性化生产要求,需要对相关区域车辆调度进行干预;第二,当井下出现交通事故时需要对相关区域信号灯进行人为控制,保障井下安全。如果需要人工干预时,可以直接在地面主站监控大屏上进行操作。
4 调度系统的应用
将设计的煤矿无轨胶轮车调度系统应用到煤矿生产工程实践中,对其各项功能进行了实践测试,发现调度系统整体运行良好,各项功能均达到了预期效果。
(1)对井下所有的无轨胶轮车位置进行了准确定位。为了测量无轨胶轮车的定位精度,在完成调度系统的部署工作后,开展了实验工作。调度系统定位精度实验统计结果如图8所示。

图8 调度系统定位精度实验统计结果Fig.8 Statistical results of positioning accuracy experiment of dispatch system
由图8可知,此次共开展了10次定位误差的实验工作,发现定位误差控制在了0.2~1.0 m,完全满足了调度系统实际的使用需要。基于精确的井下车辆定位结果,调度系统可以对所有的车辆进行安全调度。在整个测试期间,发现调度系统能够正确地控制巷道中的信号灯,车辆根据信号灯行驶或者避让,没有发生车辆堵塞或者井下交通安全事故,验证了系统运行的可靠性。
(2)车辆行驶轨迹记录和安全隐患报警。由于调度系统可以对井下所有车辆的位置进行获取,可以实时掌握井下所有车辆的行驶轨迹。一旦井下发生安全事故,可以给后续应急救援工作带来方便。另外车辆中安装了速度传感器和油温传感器。如果车辆运行速度超过了设定值,调度系统会发出安全警告,提示驾驶人员降低行车速度,保障行车安全。油温传感器可对车辆中使用的各种润滑油等的温度进行监测,如果发现温度超过了设定值也会发出警报,提示驾驶人员停车检查。
(3)闯红灯记录。在巷道的一些重要节点位置安装高清摄像头,如果无轨胶轮车行驶过程中无视信号灯随意行驶,摄像头可以进行取证并传输到系统中。系统检测发现车辆存在闯红灯行为时,对驾驶人员发出安全警告。
2015年12月21日,稽查科接到线索,得知某旧式居民小区有制假窝点,人员和房屋结构复杂。考虑到女性执法人员不易引起犯罪嫌疑人警惕,黄梅参与了此次蹲守、伏击行动,负责外围观察和发起行动信号。当该居民房门打开的一瞬间,蹲守的执法人员立即进入,迅速控制一名嫌疑人和现场,并以该窝点为伏击圈,张网以待。经过数十小时的蹲守,一一抓获了其他3名犯罪嫌疑人。嫌疑人企图用金钱收买办案人员,被办案组严词拒绝。据悉,该案查获“痛风胶囊”“骨康蝮蛇木瓜胶囊”等成品药18425盒;查获了半成品、包装材料及制假设备,案值50余万元。由黄梅承办的该案被移送司法部门,法院对4名罪犯进行了判决。
综上所述,通过对调度系统的应用测试,发现调度系统各项功能均达到了预期效果,可以安全可靠地对井下所有的无轨胶轮车进行调度。上述措施有效保障了井下的行车安全,为煤矿企业创造了良好的经济效益和安全效益。
5 结论
主要以煤矿中使用的无轨胶轮车为研究对象,设计了车辆调度系统,并将其应用到煤矿生产实践中,取得了较好的效果。
(1)设计的调度系统共划分为地面主站和井下分站部分。分站作用是对区域内的车辆位置及行驶方向等信息进行采集,所有分站的数据全部通过工业以太网传输到地面主站中进行综合分析,并下达调度指令,控制各行车区间的信号灯。
(2)地面主站和井下分站采用的控制器型号分别为610-H/L和PLC-200,均具有良好的性能,完全能够满足调度系统的实际使用需要。车载节点和检测节点之间通过ZigBee无线技术实现数据信息的传输。
(3)将设计的调度系统应用到实践中,对其定位精度开展了实验工作,发现均控制在了1 m范围以内。同时对其他各项功能进行测试发现均达到了预期效果,系统整体运行稳定,创造了良好的经济效益和安全效益。
参考文献(References):
[1] 王瑞,高进,王永旺,等.浅述煤炭综合利用的应用前景[J].化工管理,2017(35):25-27.
Wang Rui,Gao Jin,Wang Yongwang,et al.The application prospect of comprehensive utilization of coal[J].Chemical Enterprise Management,2017(35):25-27.
[2] 郑德志,任世华.我国煤矿安全生产发展历程及演进趋势[J].能源与环保,2019,41(11):1-6.
Zheng Dezhi,Ren Shihua.Development history and evolution trend of coal mine safety production in China[J].China Energy and Environmental Protection,2019,41(11):1-6.
[3] 李利文.矿井下无轨胶轮车的现状及应用研究[J].能源与环保,2019,41(3):143-146.
Li Liwen.Research on status quo and application of trackless rubber tire under mine[J].China Energy and Environmental Protection,2019,41(3):143-146.
[4] 贾艳阳.矿用无轨胶轮车精确定位系统设计[J].机械管理开发,2020,35(10):67-68,80.
Jia Yanyang.Design of precision positioning system for mine trackless rubber wheel car[J].Mechanical Management and Development,2020,35(10):67-68,80.
[5] 黄玉龙.矿井无轨胶轮车运输若干问题[J].当代化工研究,2019(7):20-21.
Huang Yulong.Some problems of trackless rubber-tyred vehicle transportation in mines[J].Modern Chemical Research,2019(7):20-21.
[6] 李峰.矿井无轨胶轮车调度监控系统的设计[J].机电工程技术,2019,48(4):143-145.
Li Feng.Design of mine trackless rubber wheel dispatching monitoring system[J].Mechanical & Electrical Engineering Technology,2019,48(4):143-145.
[7] 杨鹏.矿用支架试验台液压系统计算机控制[D].太原:太原科技大学,2009.
[8] 赵晋红.基于PLC的胶带输送机保护系统研究[J].能源与环保,2020,42(5):102-104,108.
Zhao Jinhong.Research on protection system of belt conveyor based on PLC[J].China Energy and Environmental Protection,2020,42(5):102-104,108.
[9] 胡亮.基于超宽带和惯导的井下人员定位系统研究与设计[J].能源与环保,2019,41(11):94-98.
Hu Liang.Research and design on personnel location system of underground based on UWB and inertial navigation[J].China Energy and Environmental Protection,2019,41(11):94-98.
[10] 高姗.防爆柴油机自动保护装置检测系统设计与研究[J].煤炭与化工,2020,43(6):80-81,84.
Gao Shan.Design and research of automatic protection device testing system for explosion-proof diesel engines[J].Coal and Chemical Industry,2020,43(6):80-81,84.
猜你喜欢
世界汽车(2022年6期)2022-07-13
商品与质量(2019年12期)2019-12-19
煤矿安全(2019年6期)2019-08-05
煤矿机电(2019年2期)2019-04-17
小天使·一年级语数英综合(2018年6期)2018-06-22
科学与财富(2017年30期)2018-01-01
华人时刊(2016年19期)2016-04-05
车迷(2015年11期)2015-08-23
小学阅读指南·低年级版(2014年5期)2014-09-15
中国信息化·学术版(2013年6期)2013-09-30
