
线阵CCD的光学测角嵌入式系统设计研究
2021-09-23 11:09徐道际
商品与质量 2021年36期
徐道际
安徽宏实光机电高科有限公司 安徽合肥 230000
在计量科学行业的领域中,角度测量是一种常用的使用方法,通常情况下,技术人员应用独特的测量技术,引进科学、安全的测量设备,进而获取重要的物理角度参数。在CCD技术不断的发展过程中,CCD器件及激光器的诞生,在各行各业中受到了广大人民群众的喜爱。笔者以TSL1401和LPC2138为主要研究对象,进而建立健全完整的嵌入式测量系统,并应用CCD的光电转换性能,同时结合光学测角方法,提升测量角度信息的准确性,使得CCD技术朝着自动、智能的方向发展。
1 线阵CCD角度测量原理分析
透射式成像系统是测角系统的重要组成部分,测量人员利用透明的光线将其映射在被测物体上,使得图像在线阵CCD上[1]。其中,被测物体的垂直轴线和线阵CCD的单元阵列有机的结合起来,此处将线阵CCD的成像像元宽度设定为D,一旦旋转物体产生一定角度α,在CCD一列上的成像像元宽度值也会改变成为S。具体情况如图1所示,经过相关人员的不断推导,得出了如下计算公式,即 )/(sin1SD-=α。

图1 线阵CCD角度测量原理
按照测试的流程和工作原理,相关人员通过像元挡光技术方法实现了对角度的测量和分析。如上图所示,线阵CCD在经过一系列的二值化处理后,产生了不同形状的输出波形,即上图的(a)、(b)、(C),如果被测量的物体没有经过遮光阻挡,不会使其形成一个标准的方波信号,此时物体的宽度和低电平的像元宽度大体吻合,因为像元宽度的不同使得物体旋转角度的前后遮光现象也有所差异。
为了提升测试系统的整体测试效果,实际的测量过程中,应全面对线阵CCD之中放入没有被遮光阻挡的测试物件进行处理,经过初步的计量,将测试系统计算感光的像素个数设定为P,主要表现为上图(a)所示;如图(b)所示,其代表光源、LLD对被测物体在垂直感光下得出的像素个数,如果被测物体的旋转角度固定在一个位置后,在测量人员周密的分析之下,测量系统的感光像素个数以数值m为代表,如图(c)所示。一般情况下,被测物体的宽度和感光像素的数量存在一定的联系,根据全面的计算分析之后,被测物体的倾斜角度可以表示为:

2 线阵CCD角度测量系统分析
2.1 角度测量系统分析
如图2所示,为详细的角度测量系统构成分析图。
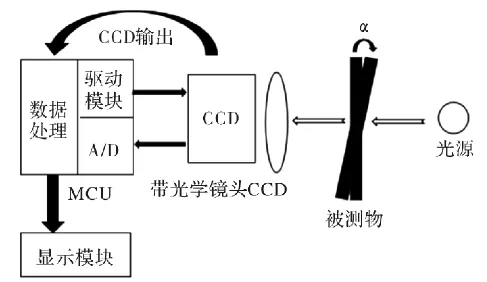
图2 角度测量系统总体构成图
CCD驱动模块、角度模块、A/D数据采集模块数据处理模块及显示模块是角度测量系统的重要组成部分。为了保证角度测量系统中信号采集的精确度,防止信号失真情况的出现,光路模块可以给根据一定的测量技术方导轨上搭建完整的元件,从而更好的设定光相关结构;与此同时,信号电压峰值和CCD的光照度有所不同,在工作人员进行基础的信号采集期间,CCD线阵中心和具体得到的信号有着很大的差距,应在周密分析的基础上,设定科学合理的光路标定数值,进而获取准确的信号。另外,一旦在测量系统中将被测的物体垂直放置,方可测试得出信号负输出的整体幅度,经过与实际尺寸和CCD采集测试物体的尺寸对比分析,测量得出光学系统的放大倍率数值,便于更好的设定光路数值[2];CCD驱动模块主要可以实时的进行ccn提供时钟、转移栅、复位栅脉冲信号传输,并更好的进行二值化电路提供相关数据信息;与此同时,CCD信号采集模块可以利用MCU软件对系统内部结构域进行高低电平的采集,并完整的储存在MCU软件中;最后,系统开发人员利用先进的处理技术,构建合理的数据处理模块系统,对成像形态及时的处理和判断,从而方便测量人员进行角度分析测试。
2.2 硬件设计
此处所叙述的硬件管理系统主要以LPC2138芯片为主要核心运行软件,进而建立科学的嵌入式系统,结合线阵CCD的TSL401CL角度测量传感器,并辅以MCU处理技术软件,在产生各类信号启动的同时,读取被测物体的数据信息,进而完成线阵CCD的角度测量工作。其中,经过不断的开发和实践,研制出了含有16/32位的ARM7TDMI-SCPU的LPC2138微控制器,在128位存储宽度和加速构件的有机协调、配合之下,使得存储器的接口在32位代码同时运行之下,确保最大时钟速率的平稳运行,在相关系统模式架构中,主要包含16路模拟输入和两个8路10位的A/D转换器,研发人员在应用相关处理技术,对较大范围的通信串口接口和32kb片内SRAM进行调整,从而将其广泛的应用在通信网关、微型控制、协议转换、语音识别行业,为提高工业领域的实验研究和测量工作创造诸多有利条件。
另外,在不断的完善和改进过程中,研究人员开发了含有128*1传感器的单元单色线阵CCD,即TSL14010CL软件,主要停止时间并负责集成像素的采集处理工作,该种阵列主要包含128个主要像素,每个像素之间的间隔不超过8.2mm,在保证高线性度完整和均匀度合理的情况下,确保整体动态范围为4005:1。此种阵列模式的运行系统必备的基础条件相对简单,使用5V电压就可以确保其正常运行,并且此种控制模式下的操作具有极强的逻辑性,通过时钟CLK和串行输入端的相关信号就可以进行规范操作。具体运行情况如图3所示。
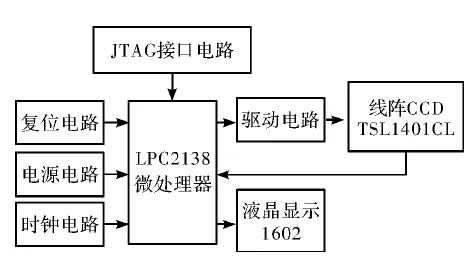
图3 TSL14010CL软件的执行图
为了保证线阵CCD时钟操作时序的规范性和正确性,应在确定最小时间的同时,使得SI前置低平电在下一个时钟的上升之后进行。在运行过程期间,会产生一系列的hold信号,经过相应处理,传送到模拟开关的像素内部结构之中,进一步确保传送的信号和积分电路中的128个像素隔离,最后促使积分器处于复位状态。值得注意的是,在移位寄存器的相应处理之下,SI的脉冲时钟也会进行位移,进而保证电荷耦合放大器中的存储采样电容相互进行连接,最后产生相应的模拟放大输出AO,详情如图4所示[3]。

图4 驱动时序波形图
3 系统调试及结果
实验人员根据具体的实验操作,结合线阵CCD的驱动时序要求,并利用MCU处理软件进行驱动程序分析和处理,从而完成CCD驱动处理工作。本文通过LPC2138芯片的p0.1和P0.0进而产生SI时序信号和CLK,在紧密结合CCD输出信号并通过示波器驱动信号观察,满足了CCD的实际运行需求,进而快速的完成信号输出成像处理工作。具体结果如图5所示。

图5 CCD驱动信号及输出信号波形图
在角度测量准备工作期间,工作人员结合操作系统的性能对相关光路进行标定处理,且在CCD和光源之间不摆放任何物体,在不断调整光路的同时,根据MCU处理软件的成像信号进而计算感光像素数量,当垂直放置CCD和光源之间的旋转角度,并收集、获取相应测量角度数值,最后确保旋转角度和显示角度一致。
4 结语
总而言之,线阵CCD测量系统已经在二值化处理、角度测量方案设计以及数据采集测量电路中被普遍推广和应用。但是受到外界客观因素的影响,也暴露了诸多不良现象,如像元个数测量范围被约束、必须在光路校准情况下进行操作等。因此,光路设计的开发人员应积极学习国内外先进的线阵CCD光学处理技术,并树立自主创新的思想,在因地制宜、统筹规划的基础上,促进测量角度等工作可以顺利开展。
猜你喜欢
小哥白尼(军事科学)(2022年2期)2022-05-25
小学生学习指导(低年级)(2020年10期)2020-11-09
红领巾·萌芽(2019年8期)2019-08-27
数学大王·低年级(2018年9期)2018-10-24
数学大王·中高年级(2017年2期)2017-02-08
学苑创造·A版(2016年4期)2016-04-16
CHIP新电脑(2016年3期)2016-03-10
人生十六七(2015年5期)2015-02-28
销售与市场·管理版(2009年21期)2009-09-03
数码影像时代(2006年5期)2006-05-29
