
一种基于Adams的稳定杆连接杆球销 摆角计算方法
2021-09-23 09:46范洪春韦达稳谭姣姣
汽车实用技术 2021年17期
范洪春,韦达稳,谭姣姣
(1.上汽通用五菱汽车股份有限公司,广西 柳州 545007;2.柳州孔辉汽车科技有限公司,广西 柳州 545007)
引言
汽车常用的前悬布置形式中,麦弗逊悬架作为独立悬架的一种,具有质量轻、结构简单、布置紧凑等优点,是目前前置前驱动轿车和轻型客车的首选悬架形式[1]。在悬架设计中,为了减小车辆过弯时的车身侧倾角,增加稳定杆装置是最常用且有效的措施。
稳定杆通过连接杆将稳定杆和悬架的运动关联起来,实车上连杆上下均采用球头进行连接。在实际使用过程中,由于车轮跳动和转向,使得稳定杆连接杆的运动变得愈加复杂。因此,要分析悬在极限运动中的球销摆角是否处在安全设计范围内,就变得难上加难。如果球销的摆角设计不够合理,会使球头的防尘胶套经常受到挤压损坏导致漏油,从而产生异响且影响球头的使用寿命,更严重时还会造成零件干涉影响行车安全。
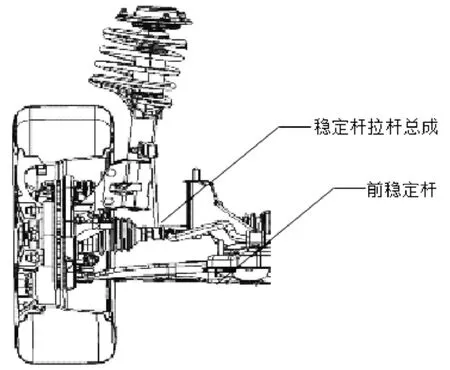
图1 麦弗逊式前悬架
上下球头的球销摆角不但和悬架运动有关,也和上下球头的摩擦大小有关,摩擦小的一端有可能先摆到最大角度。通过常用的建模软件如UG、CATIA的运动仿真难以还原真实的运动情况,而Adams作为多体动力学仿真最常用的软件,且Adams/car又融合了轮胎、求解器和后处理等模块,故能够使车辆开发更便捷高效[2]。本文即在Adams/car建立的完整悬架模型基础上,介绍稳定杆连接杆球销摆角的计算方法。
在应用Adams建模时,如果稳定杆连接杆上下都用球副建模,不符合K特性的自由度要求,因此要将其中一个球副用万向副或者等速副代替。而用万向副或者等速副代替的球头无法绕着连接杆轴线偏摆,使得连接杆的运动与实际情况严重不符,所以这种建模方式不能指导球销摆角的设计。万向副代替球副的建模仿真结果如图2所示。

图2 球副、等速副摆角的仿真结果
而衬套有六个自由度,通过合理设置各方向的刚度能够等效球头的属性。因此本文提出连接杆两端均采用衬套代替球头的建模方式,同时给球销和球杯建立接触条件,从而还原球销在实际使用过程中摆到最大角度后被限位的情况。
1 计算方法
1.1 衬套代替球头的建模方法[3]
1.1.1 衬套刚度设计
由于衬套有六个方向的自由度,故通过对各个方向的刚度值进行设定,即可等效不同的运动副。比如,用衬套等效稳定杆连接杆的球铰运动副,其三个方向的线刚度均设为刚性,三个转动自由度均释放,为了提高仿真的精确度,衬套的线刚度应不小于108N/mm,同时通过设定衬套的扭转刚度实现球头的摩擦力,建议值为100 Nmm/deg。
1.1.2 衬套的方向定义
在使用Adams建模时,首先将衬套的中心和零部件的铰接中心重合,如果要读取球销在各个方向的摆角分量,可以借助衬套后处理自带的定义输出,因此需要定义衬套的X和Z方向,摆角的正方向定义符合右手定则,大拇指指向对应轴的正方向。现将衬套的Z轴定义为与球销的轴线重合,指向固定螺母方向,定义衬套的X向指向车辆正前方。
1.2 球销摆角测量输出建立
稳定杆连接杆球头的总成如图3所示,球销和球杯轴线不一定是重合的,球销的摆角∠AOB由球心点、球销轴线点及球杯轴线点的空间相对位置确定,需要在这三个位置建立标志点。且由于左右车轮的最大转动角度不相等,为防止球头防尘胶套被单边挤压,充分利用有限的摆角设计空间,需要优化球销的初始安装摆角,并求出球销摆角绕X/Y的摆动分量。
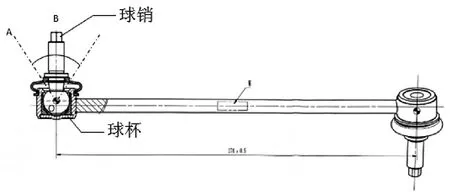
图3 稳定杆拉杆总成
以左侧稳定杆连接杆的上球头为例,先假设某车型左侧上球头的硬点坐标如表1。在球头的旋转中心给球销和球杯部件分别建立一个Marker_O和Marker_O1,Z轴分别指向球销和球杯轴线方向的Marker_A、Marker_B,X轴垂直于上下球心点与球销轴线构成的平面,指向车头前方。

表1 左侧连接杆上球头硬点表
在球销和球杯部件上建立对应的Marker点后,进行球销摆角的测量建立,利用Adams软件内置的函数Angle aboutX/Y/Z和Included Angle来测量球销摆角的分量和空间合角度,建立结果如图4所示。

图4 摆角request建立结果
1.3 球销球杯接触条件建立
在实际车辆使用的过程中,上下球头中摩擦小的一端可能会在摆动时先摆到极限位置,而摩擦大的球头会在另一端无法继续转动的时候才开始转动。如果上下球头的摩擦力相近,由于布置的原因,导致上下球头的摆动速度不一致,也会产生其中一个球头先摆到极限的情况,因此给球销和球杯设定接触条件很有必要。如果通过对衬套的扭转刚度进行非线性处理来达到摆角限位的效果,会因为刚度非线性突变太大而影响求解,且较难实现空间合角度的限位,因此可以通过给球销和球杯建立一个单向作用力的方式,即当空间合角度达到设定值时,接触力被激活,从而起到模拟接触的效果。
以左侧的接触为例,将稳定杆的建模环境切换到View环境下,在主工具窗口中找到并点击单向力建立图标,Run- Time Direction选择Two Bodies,分别选择球销和球杯部件,再选择上下球心点作为方向点。建立好接触力后,设置接触条件,右键单击单向力图标选择Modify,在Function项设置接触函数,接触力建立如图5所示。

图5 球销、球杯接触建立
2 仿真结果
2.1 仿真工况设定[4]
根据车辆实际使用情况,制定出如表2所示的七种工况并进行仿真。

表2 稳定杆球销摆角计算的仿真工况表
2.2 仿真结果
某车型在路试结果中反馈,出现稳定杆连接杆上球头防尘套被压坏漏油的情况,此时稳定杆连接杆的球头最大摆角设计值为25°。
根据本文的分析方法进行稳定杆连接杆球头仿真分析,通过各工况的仿真结果对比,得出球销摆角最大值出现在下极限全转向的工况。仿真结果如图6所示,在转向内轮一侧,稳定杆连接杆上球销的摆动角度比下球销大,因此先于下球销摆至极限。此时只有下球销仍在摆动,当齿条位移达到最大时,下球销摆角也接近最大设计值。虽然零件还没有发生干涉,但已经很接近极限,而且从仿真结果看来,转向过程中总是由上球销先摆到极限,这就与实车路试中上球头防尘套损坏的结果一致。因此,考虑零件的制造公差,应将球销的最大摆角设计范围加大。

图6 下极限全转向的球销摆角
3 结论
基于Adams/car的稳定杆连接杆球销摆角计算方法,为解决模型自由度的问题,可以通过对衬套六个方向的刚度进行合理设置,从而实现球副的等效建模。同时,为了使仿真结果更接近实际,特给球销和球杯建立接触条件,还原球销在实际使用过程中摆到最大角度后被限位的情况。最后,针对某车型出现的问题进行各工况下的仿真,且仿真结果与实车路试反馈的结果一致,验证了此方法的可行性。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
汽车实用技术(2022年16期)2022-08-31
计算机应用(2022年2期)2022-03-01
数理化解题研究·综合版(2021年11期)2021-12-22
小学教学研究(2021年5期)2021-09-29
阅读与作文(高中版)(2021年5期)2021-06-30
课程教育研究(2021年27期)2021-04-13
时代汽车(2021年1期)2021-03-03
初中生世界·九年级(2020年2期)2020-04-10
大众科学(2015年1期)2015-09-10
