
船载机电装备可靠性模拟试验技术综述
2021-09-19 01:16刘隆波闻华殿刘震涛
振动与冲击 2021年17期
张 威, 刘隆波, 闻华殿, 张 衍, 刘震涛
(1.浙江大学 能源工程学院,杭州 310007; 2.92942部队,北京 100161)
舰载机电装备(如舰船辅机海水泵、启动电机等)在船载环境下,受到的主要载荷是振动和摇摆的复合作用。以海水泵为例,振动载荷由辅机(柴油机)工作时产生。对于一般的柴油发动机,其表面振动加速度可达15g~30g[1];摇摆载荷则由海面波动引发,较恶劣的海况下,船体的横摇角度可达到±40°[2]。由此可见,振动、摇摆载荷对船载机电设备的可靠性存在不可忽略的影响。
对于机电装备可靠性研究的主要手段包括仿真分析和试验研究两种,舰船实际工作环境下的试验研究可以真实、有效地对机电装备的可靠性进行评估,但是其周期和成本代价高昂,并且无法实现加速及强化试验,因此模拟试验技术是一种高效、经济的评估手段。目前对于船载机电装备的模拟试验,由于试验装备、试验方法的限制,往往通过简化载荷形式,侧重单一载荷,如只进行振动载荷下的试验而忽略摇摆载荷、或者反之只进行摇摆试验。而对于振动、摇摆载荷同时施加时的可靠性模拟试验技术,则鲜见报道。本文的主要工作是对现有的舰船机电装备可靠性模拟试验技术现状进行分析梳理,为系统开展振动摇摆一体化试验技术研究提供指导。
1 振动模拟试验技术研究现状
开展模拟试验是机电装备在可靠性评估时较常用的手段之一,本章节只考虑进行振动模拟试验作为研究振动载荷对机电装备的影响的研究手段。振动模拟试验用于模拟各类产品在运输、执行工作过程中所遭遇的振动环境,鉴定产品承受振动环境的能力,检测产品结构的耐振性、可靠性和完好性。在进行船载机电装备的振动试验时,可以通过模拟装备在实际工作环境下受到的振动载荷,复现装备真实的振动频率、振动幅值、振动加速度,以此完成振动模拟。以海水泵为例,在其工作时会受到辅机(柴油机)产生的振动载荷的影响,可通过模拟试验的手段,将振动载荷等效施加在模拟试验台上,通过模拟试验台完成对泵可靠性的考察。
目前,相关试验装备的研发已较成熟,根据试验需求还可以选择不同的结构。此外,振动载荷施加时涉及的控制算法也较为成熟,各领域制定的振动试验方法的标准文件可用于整体试验的指导,可见机电装备的振动模拟技术已相对完善。
1.1 振动模拟试验台的机械结构
振动试验台在机械结构上可大致分为机械式振动台、电磁式振动台、电液式振动台三大类。
1.1.1 机械式振动台
机械式振动台,特点为主要靠电机驱动。依托复杂的机械结构,使导杆产生往复运动,从而带动台面产生振动,结构上主要有不平衡重块式和凸轮式两类。目前开发较多的是凸轮结构。吴雁等[3]发明了一种基于凸轮机构的三向振动试验机如图1所示。利用调速电机驱动凸轮机构的传动轴转动,凸轮轨迹槽内的从动导杆带动辅助振动平台产生X、Y、Z三向的往复运动。可通过更换不同类型的凸轮轨迹槽的圆柱凸轮,实现不同类型的振动轨迹。李研彪等[4]研制了一种三自由度振动环境试验平台,其振动台面铰支在三个支链上,通过伺服电机驱动三个支链进行往复式运动,形成三自由度的振动,如图2所示。
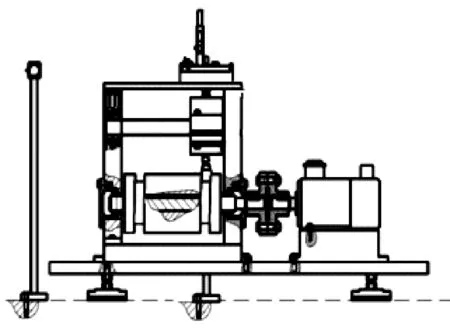
图1 一种基于凸轮机构的三向振动试验机Fig.1 A three-way vibration testing machine based on a CAM mechanism
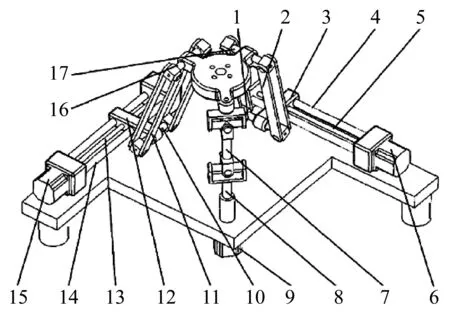
1/10-连杆;2/7/11-定长杆;3/12-移动滑块;4/14-导向杆;5/8/13-滚珠丝杆螺母副;6/9/15-伺服电机;16/17-动连杆图2 三自由度振动环境试验平台Fig.2 A vibration environment test platform with three degrees of freedom
一般的不平衡重块式和凸轮式振动台,都无法实现随机振动。王庆杰等[5]发明了一种利用球形滚子撞击的随机振动式试验台,球形滚子由旋转的扇叶拨动,扇叶则由电机驱动。其振动台面通过弹簧与支架连接,通过旋转扇叶撞击球形滚子,使球形滚子在激振装置内随机不规则地撞击传力导杆,产生随机不平衡惯性力作用于振动台面,从而产生各方向上的随机振动,如图3所示。
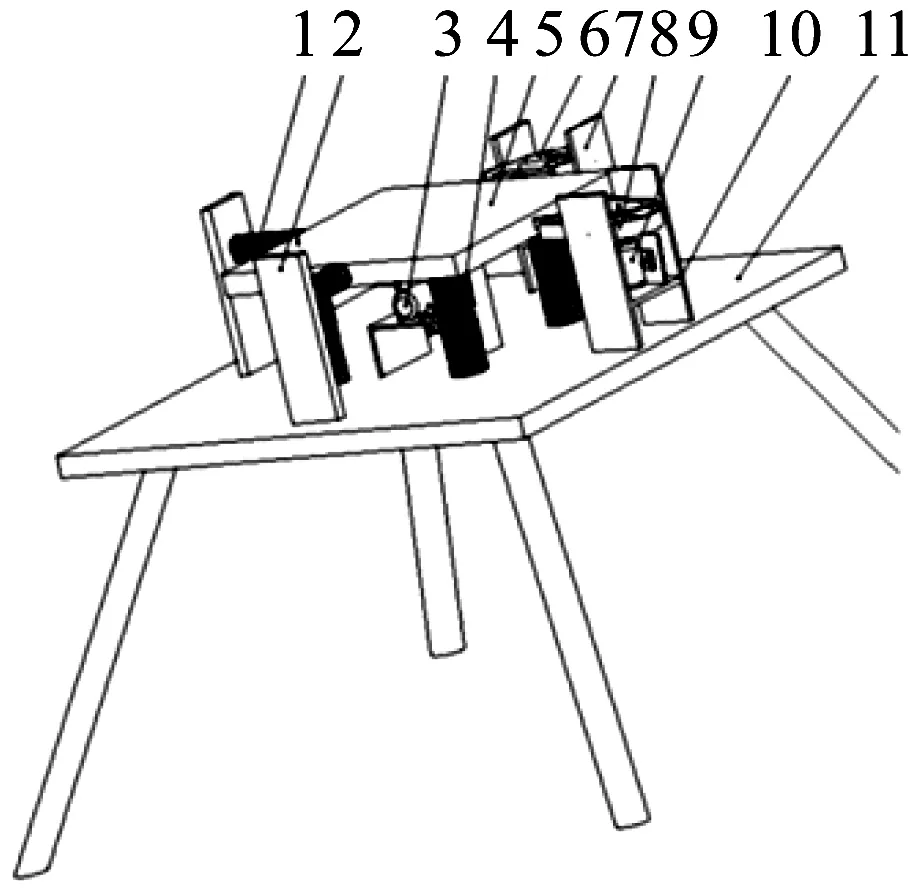
1/4-弹簧;2-挡板;3/9/10-电动机;5-振动平台;6/8激振装置;7-激振装置固定架;8-X方向激振装置;11-支架图3 一种随机振动试验台Fig.3 A random vibration test bench
机械式振动台的功能往往需要复杂的机械结构来实现,且其性能不高,在今后的开发使用上会越来越少。
1.1.2 电磁式振动台
电磁式振动台根据电磁感应原理设计,当通以交变电流的导体处在恒定磁场中将受到交变力的作用从而发生振动。将激励线圈置于一个高磁感应强度的空隙中,由信号发生器或振动控制器产生振动信号,并经功率放大器放大后通到激励线圈上,使得振动台产生需要的振动波形。李真兵[6]发明了一种三层的电磁振动台,每层提供一个方向的振动,可单独施加亦可同时施加,结构如图4所示。
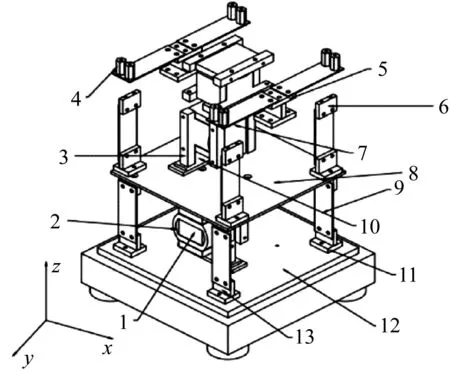
1/2-电磁组件;3-支撑底座;4-连接柱;5/11/13-支撑板;6/9-弹片;7-磁板;8/12-连接板;10-安装板图4 一种三层结构的电磁式振动台Fig.4 An electromagnetic vibrating table of three-layer structure
1.1.3 电液式振动台
电液式振动台作为振动试验的常用设备之一,采用电液伺服阀,通过液压控制传动装置产生振动激励。输入的电控信号经放大器放大进入伺服阀,伺服阀把与输入信号成比例的液压油输入液压缸,以驱动活塞往复运动并带动台面振动。电液振动台能产生很大的激振力和速度,而且在低频的时候可以得到很大的激振力。
武永星等[7]研制了一种三轴振动疲劳试验台如图5所示,通过在台面下方X、Y方向设置滑槽并与导轨配合,Z向设置多根阻尼导向柱,由伺服阀控制液压缸,实现X、Y、Z三个方向的振动。在国外,电液式振动台的应用更早,在1979年就已被用来进行整车振动试验[8]。
1-压装槽;2/3/8-工作台;4/10-作动器;5/9-静压支撑突起;6/11-导轨;7-底座图5 一种电液式三轴振动疲劳试验台Fig.5 An electro-hydraulic triaxial vibration fatigue test bed
1.2 振动模拟试验控制技术
目前对控制系统依赖较大的振动试验主要有正弦振动试验、随机振动试验以及时间历程复现试验。
正弦振动试验,分定频和扫频试验,其一般控制逻辑如图6所示[9]。随机振动试验,一般以功率谱密度定义振动条件,考核受试对象整体性结构耐振动强度或模拟其在包装状态下的运输环境。但其实质上是一种宽带随机振动,无法复现真实的振动波形,为此提出时间历程复现振动试验,旨在复现出目标信号的时域波形,该目标信号通常通过数学模型产生或直接采集得到,因此也称路谱仿真实验,可在实验室复现设备真实经历的振动环境。
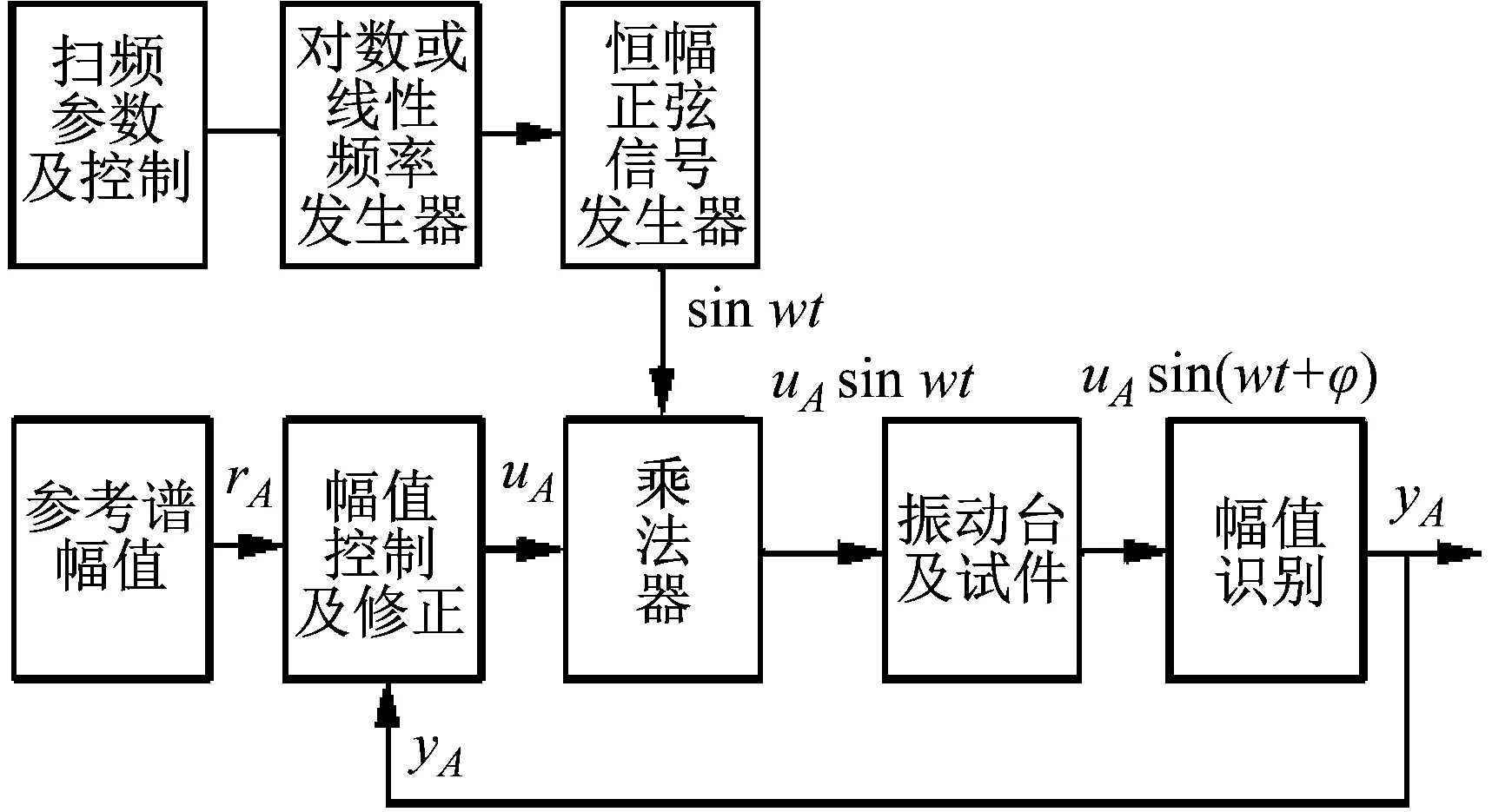
图6 正弦振动试验控制逻辑Fig.6 Control logic of sinusoidal vibration test
时间历程复现控制方式主要分为三种方式:一是基于频域的控制方式;二是基于时域的控制方式;三是基于频域和幅值域的控制方式。基于频域的控制方式采用频谱均衡的控制算法,同时作为一种闭环振动控制方式,也应用于一般的随机振动试验中,原理图如图7所示;基于时域的控制方式的基本思想是在试验室中严格地复现采集到的时间历程,这种控制方式能够准确模拟非平稳随机过程,对被试件激振点与响应点的线性程度要求较低,复现比较直观,是最精确的模拟方法,最具代表性的方法是迭代控制方式,原理图如图8所示;基于频域和幅值域的控制方式,是将相同功率谱下不同的时域波形的差别用峭度和偏斜度两个指标来表示,以此复现具有不同峭度和偏斜度的时域波形[10]。

图7 频谱均衡控制算法控制逻辑Fig.7 Spectrum equalization control algorithm control logic
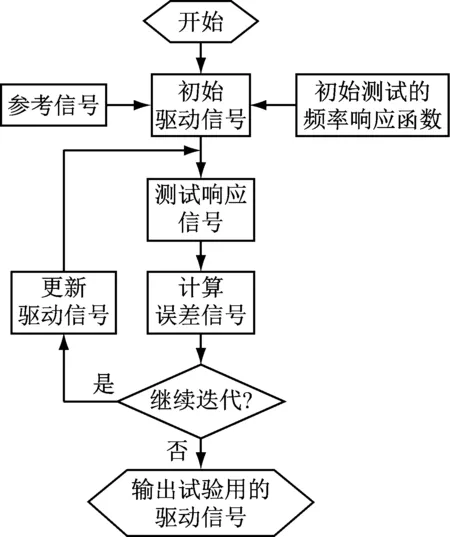
图8 迭代控制算法控制逻辑Fig.8 The iterative control algorithm controls the logic
1.3 装备在振动载荷下的模拟试验方法
目前,在多个领域都制定过对于振动试验的方法类标准,对于振动试验的开展具有指导意义。
JIS D 1601—1995《汽车零部件振动试验方法》[11]提出了用于汽车零件的振动试验方法。该试验方法分为共振点检测试验、振动性能试验、振动耐久试验、扫描振动耐久试验四类,并将振动条件按汽车种类和按安装状态分类。根据零件的安装状态,按顺序施加上下、左右、前后垂直的简谐振动。试验分为共振点监测、振动性能试验、振动耐久试验、扫描振动耐久试验四个阶段。
GJB 4.7—1983《舰船电子设备环境实验——振动试验》[12]提出了用于舰船电子设备的振动试验方法。根据不同的振动频率将舰船分为几个区域,建立不同分区的振动模型。利用振动试验台对舰船电子设备施加不同方向的载荷,复现装备实际工作时的振动环境。试验分为共振检查、稳定性试验和耐振试验。
GJB 150.16A—2009《军用装备实验室环境试验方法——第16部分:振动试验》[13]提出了对于军用水面船的振动试验方法。该试验方法将船的振动表示为由周期分量和随机分量组成的复杂函数,其中周期分量由设备运转产生,随机分量受海况等自然因素影响。将船的振动分解为正弦部分和随机部分,分别施加。该试验方法分别规定了正弦振动试验的振动频率、振动位移和振动加速度,以及随机振动试验加速度谱密度和(对数)频率。
TBT 2846—1997《铁路地面信号产品振动试验方法》[14]提出了用于铁路地面信号产品的振动试验方法。根据给予产品的振动量值的大小,将产品归为4类。分别对产品进行共振试验、振动性能试验、振动耐久试验。根据试件的安装状态,从三个相互垂直的轴线上给以单向振动,使试件按给定的加速度及位移振动。
2 摇摆模拟试验技术研究现状
本章只考虑进行摇摆振动模拟试验作为研究摇摆载荷对机电装备的影响的研究手段。摇摆模拟试验适用于考察试验对象在摇摆环境下的工作稳定性和可靠性,一般用于模拟设备在工作时经历的各种摇摆环境。在进行船载机电装备的摇摆试验时,模拟装备在船载环境下受到的摇摆载荷,复现实船航行时的摇摆角度、摇摆周期,以此完成摇摆模拟。以海水泵为例,在舰船航行时受风浪作用使船体发生周期摇晃和颠簸,这种船体的摇摆作用在泵体上,使泵体承受交变的力载荷。而进行实船测试成本高、效率低,因此可以将海水泵固定在试验台上,使试验台产生等效的摇摆,对海水泵进行可靠性评估。
目前国内外已研发了多种摇摆试验台,并就不同的摇摆试验台对其控制算法也进行过研究。同时,各领域制定的摇摆试验方法的标准文件可用于整体试验的指导。
2.1 摇摆模拟试验台的机械结构
以船舶摇摆试验台为例,其主要是用来复现船舶在水面上的运动姿态,为船载机电装备提供模拟工作环境,该环境主要为船舶航行时由于风浪产生的摇摆工作环境。船舶摇摆包括横摇、纵摇、艏摇、横荡、纵荡、垂荡六种,针对其中影响较大的横摇、纵摇、垂荡三种摇摆载荷,有下列几种摇摆试验台的设计。试验台的机械结构,主要根据驱动形式分为电液式摇摆台和电动式摇摆台两大类。
2.1.1 电液式摇摆台
电液式振动台采用液压缸作为其主要驱动装置,通过液压缸活塞的周期性伸缩实现试验台面的摆动。该结构最为典型的是Stewart机构[15],它是由英国工程师Stewart作为一种六轴并联式空间机构的设计提出,用于飞行试验的模拟驾驶舱。该机构结构简单而又稳定,承载能力强,在工程领域得到广泛应用,常见的Stewart机构如图9所示。

图9 Stewart机构简图Fig.9 Stewart organization schematic
波音公司将小型的Stewart结构用于座椅上,模拟其在飞行运动中的姿态,以此替代大型的飞行模拟器[16]。该机构由6根伺服液压缸驱动,通过控制液压缸伸缩量来精确控制座椅的空间位置,从而模拟飞行姿态,如图10所示。
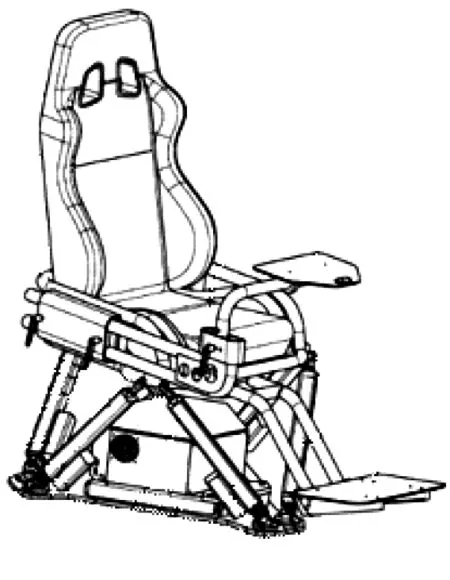
图10 模拟飞行姿态的运动平台Fig.10 Motion platform for simulating flight movements
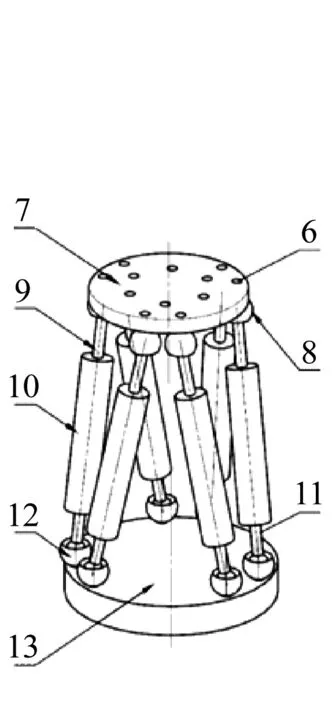
在Stewart结构出现之后,以该结构为原型开发优化,得到了一系列多自由度并联机构的摇摆试验台,比较具有代表性的有三支撑的并联机构摇摆试验台,如三自由度3-RPS并联机构,其结构示意图如图11(a)所示。该并联机构由3支RCS链连接运动平台和固定平台,分支等效于RPS支链,该机构的各分支结构是对称的。三个伸缩支撑杆的伸缩运动可实现两个自由度的转动和一个自由度的移动。哈尔滨工程大学以此为基础设计了一种直角三缸并联驱动摇摆试验台,可在实验室环境下模拟舰船在水中的摇摆和运动,具有结构简单、成本低、承载能力大以及可移动性好等特点,结构如图11(b)所示[17]。

Tempel等[20]用了不同的思路,将Stewart机构用作船体的运动补偿,发明了相应的运动平台,如图12所示。该平台包含六个自由度,利用传感器监测平台附近区域各自由度上的实时动作,并通过执行机构——液压缸来实现平台和船体的相对运动,抑制平台对地的运动,从而实现平台可以保持对地水平。

1-搭载平台;2-蓄电池;3-压缩机;4-水管;5/6/7/8-液压缸图12 船体运动补偿平台Fig.12 Vessel motion compensation platform
2.1.2 电动式摇摆台
电动式摇摆台一般采用电机作为其主要驱动装置,由电机输出轴的旋转提供扭矩,驱动试验台周期摆动。以一种三轴摇摆试验台为例,其机械结构包括U型外环、O型中环和内环,三环可自由绕各自的轴转动,三条轴相交于固定点。该结构能够模拟船舶艏摇、横摇、纵摇的三自由度运动。该三轴摇摆试验台结构还可以演变成具有两个转动自由度和一个移动自由度的平台式摇摆试验台结构,可以实现一个平移和两个转动运动,即船舶在航行时的垂荡、横摇和纵摇运动,两种结构如图13所示。
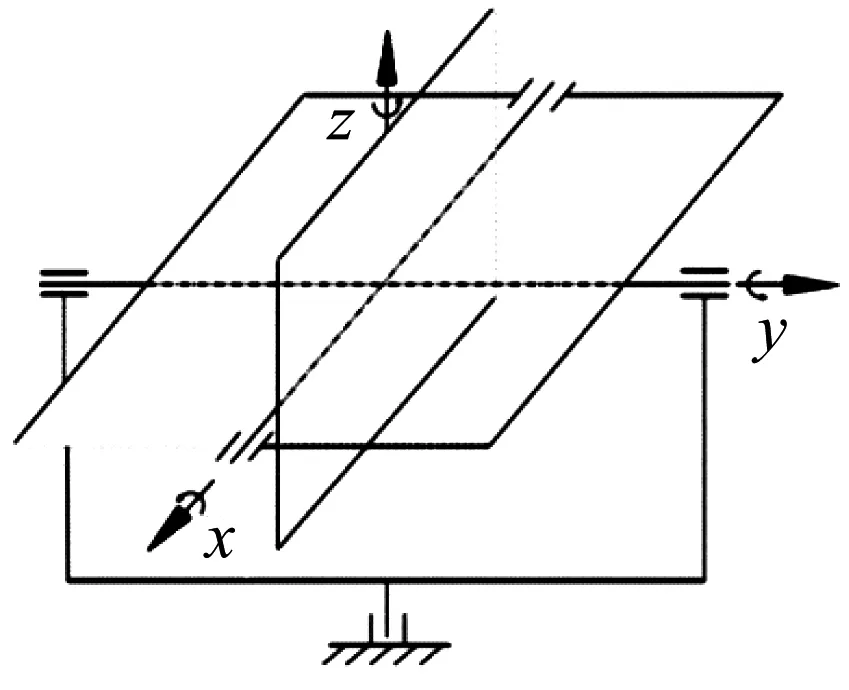
图13 三轴摇摆试验台&及其演变版结构示意图Fig.13 Triaxial swing test bench & its evolvement structure diagram
2.2 摇摆模拟试验控制技术
摇摆模拟试验的主要控制参数为角度、周期、持续时间,最普遍采用的是正弦定频摇摆试验,即控制摇摆周期和摇摆角度保持恒定,以该特定频率进行摇摆试验,该摇摆符合正弦运动的特性。定频摇摆试验有局限性,只能模拟某种特定摇摆环境,故在此基础上又得到了正弦扫频摇摆试验,可以考核产品在整个试验周期内,不同摇摆角度下的环境适应性。除此之外,由于机电装备在真实工作环境下不可能只受到正弦摇摆,随机摇摆试验便可以模拟这种随机的摇摆环境。
根据李晓琳等[21]归纳介绍的方法,定频正弦摇摆试验系统由于频率低、频带窄,可视为线性系统。先通过系统辨识环节,估算传函系数;再进行幅值识别和修正。扫频摇摆中的系统辨识采用节点频率的系统增益辨识,并进行全频带的增益线性拟合,对各周期下的摇摆幅值进行反馈补偿。随机摇摆基于均方根控制,采用限制带宽的随机信号辨识系统增益和均方根补偿的方法。
在定频正弦试验基础上,李学忠等[22]将纵横艏三自由度摇摆角时间历程近似看作一变幅值变周期的组合正弦运动过程,忽略了其中周期的变化,采用三次谐波叠加的方法建立了摇摆的数学模型,在控制上采用了位置、速度、电流三闭环的PID控制系统。
另外,在摇摆试验的控制算法方面普遍采用了PID控制方式。张江明等[23]使用模糊自适应的PID算法,在常规PID算法设计三环控制器参数的基础上,对位置环进行优化设计,应用模糊推理方法对常规PID的参数进行在线整定;南京航空航天大学的肖福勒[24]引入了RBF神经前馈网络,用于处理液压系统自身的非线性特性所引起的工作范围大、参数变化频繁等问题,采用基于RBF神经网络的PID控制方式,优化了常规PID对液压缸的控制效果。
2.3 装备在摇摆载荷下的模拟试验方法
与振动试验方法类似,目前在多个领域也都制定过对于摇摆试验的方法类标准,包括了试验项目、试验指标、试验量级、试验时间等参数,对于摇摆试验的开展具有指导意义。
文献[25]提出了电工电子产品的倾斜摇摆环境试验方法。本试验将倾斜分为纵倾、横倾两种形式;将摇摆分为纵摇、横摇、艏摇、纵荡、横荡、垂荡六种形式。在倾斜试验中,控制一定的试验台角度使产品处在特定的位置;摇摆试验中,在产品安装后产生连续、光滑的正弦波,以控制产品做出等效于实际工作情形的运动。规定倾斜试验持续时间不小于15 min,摇摆试验持续时间不小于30 min,另外还规定了摇摆幅值、摇摆周期等参考量级。
文献[26]提出了舰船设备的倾斜摇摆环境试验方法。本试验将倾斜分为横倾和纵倾两种形式,将摇摆分为横摇和纵摇两种形式,并将整个试验分为倾斜试验、摇摆试验、倾斜和摇摆综合试验。使用摇摆试验台使试件发生倾斜、摇摆运动,通过改变摇摆试验台的空间位置,使试件承受不同类型的应力。规定了倾斜角度的大小,摇摆角度和周期的大小,给出了关于摇摆角度和周期的可参考量级。并规定倾斜和摇摆试验持续时间均应大于等于30 min。
文献[27]提出了地质仪器产品的倾斜摇摆环境试验方法。试验方法将产品的倾斜分为前、后、左、右四种形式,将摇摆分为前后和左右两种形式。规定倾斜或者摇摆的最大角度为22.5°,倾斜试验持续时间15 min,摇摆试验持续时间10 min,摇摆周期为8 s。
3 振动、摇摆一体化模拟试验技术研究现状
与前文所述的振动试验、摇摆试验相比,振动、摇摆一体化模拟试验更适用于船载机电装备的可靠性模拟,其优势在于,综合了振动模拟试验和摇摆模拟试验的特点,将高频振动载荷和低频摇摆载荷同时施加在机电装备上。但是该类试验需要专门的可同时施加两种载荷的试验台,以及对多路载荷信号的控制系统,这是目前的研究所欠缺的。
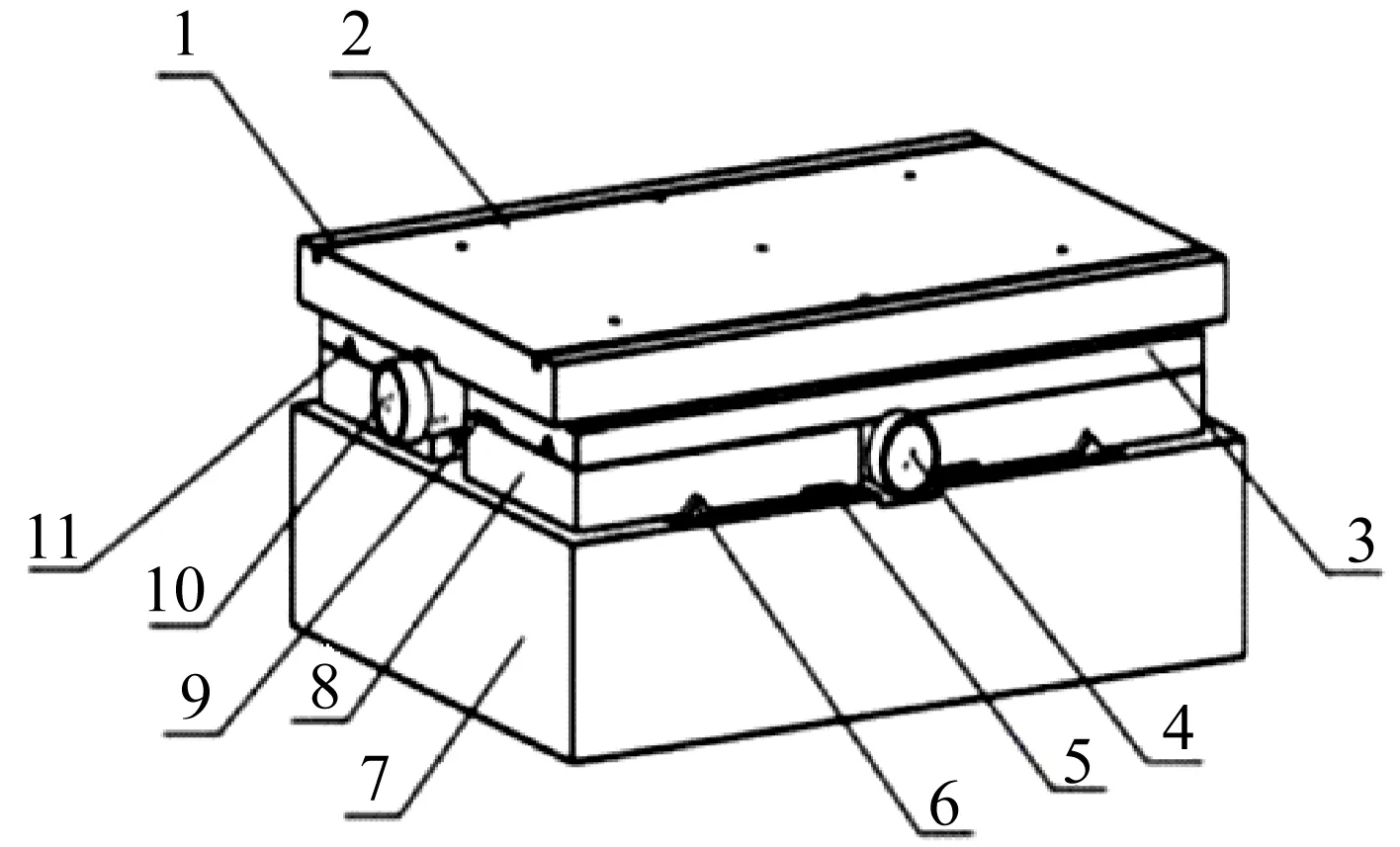
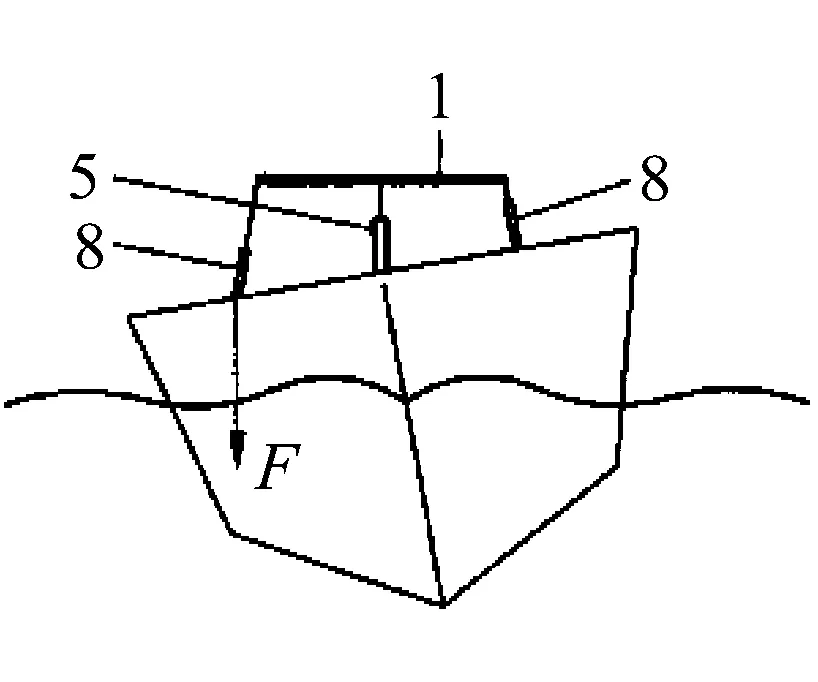
中国工程物理研究院的郑敏等人研制了一种倾斜摇摆与低频振动复合实验平台[28],如图14所示,将大幅值的倾斜摇摆运动与小幅值的低频振动进行叠加,可以模拟舰船、潜艇等在海上的运动情形。该装置由六自由度倾斜摇摆平台和低频液压振动平台两部分组成,其中倾斜摇摆平台可以模拟多空间位置的倾斜,实现各类典型摇摆;振动液压缸可实现低频振动,模拟舰船随海面起伏颠簸。但是,这种低频振动,实质是船体的“垂荡”,与摇摆载荷的叠加,是为了复现船体在海面的运动情形,仍未考虑内部发动机等设备产生的高频振动。Swift等[29]也提出过相似的结构,同样采用液压元件作为主要驱动装置,与前者相比还增加了运动自由度,如图15所示。

1-工作平台;2/9-活塞杆;3-低频振动液压缸;4-振动平台底座;5-振动平台通孔;6-摇摆平台通孔;7-摇摆工作平台;8/12-球铰;10-摇摆液压缸;11-连接杆;13-底座图14 倾斜摇摆与低频振动复合实验平台Fig.14 Tilt-swing and low-frequency vibration composite experimental platform

图15 多斯图尔特结构耦合平台Fig.15 Motion system with plurality of Stewart platform based actuators
同样地,黄彦[30]介绍了一种六自由度摇摆振动平台,考虑了船舶横摇、纵摇、艏摇三个自由度的典型摇摆,以及垂荡、纵荡、横荡三自由度的“振动”。林玮等[31]为提高船载制冷系统的制冷稳定性,对海洋条件下的流动与换热特性进行研究,其中的海洋条件被描述为船体的摇摆和“振动”。上述“振动”实则是一种低频振动,即船体的晃荡,可归于船体“摇摆”类别中。相对地,Manabu[32]发明的振动激励装置,通过将由磁铁、线圈、弹簧组成的摇摆单元封装在框架内,使摇摆单元高频“摇摆”从而使装置外框架表现为“振动”,如图16所示。若在该装置基础上再复合低频的“摇摆单元”,则更接近本文提出的一体化试验环境。因此,对于本文而言,上述研究成果都具有局限性。
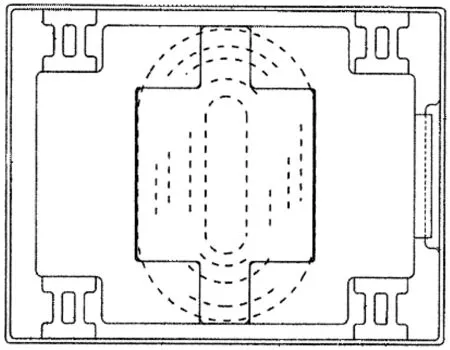
图16 具有摇摆单元的振动发生器Fig.16 Vibration generator having swing unit
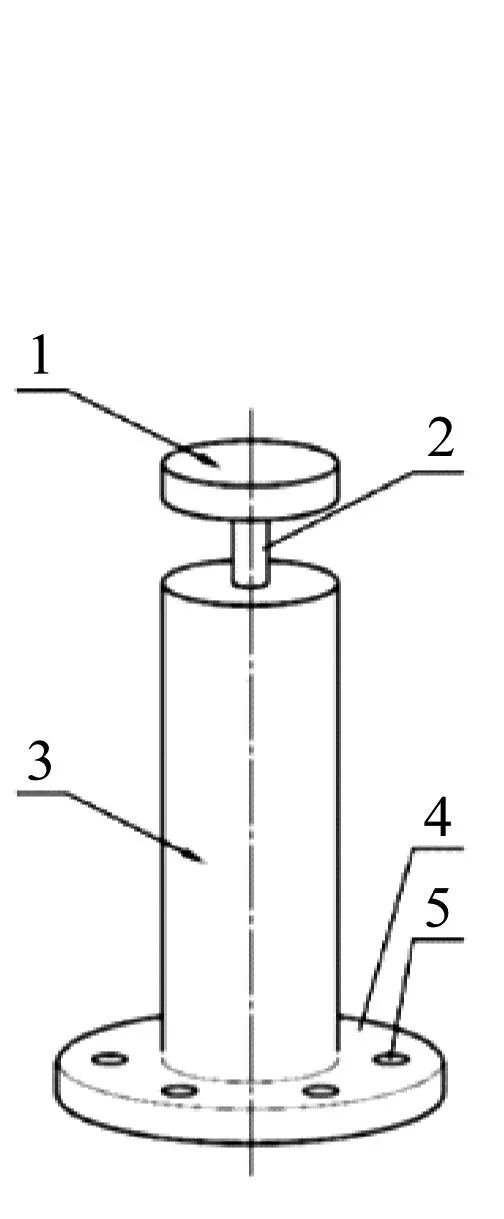
真实的船载机电装备的工作环境,从原理上讲,实则更接近于Steven Gibree发明的婴儿床中所采用的一种结构[33],在座椅上安装振动激励装置,可以在摇摆的同时施加高频振动载荷,如图17所示。但从可靠性的角度上来说,这种结构提供的载荷,无论从量级或是载荷特性上来说,显然都是不足以进行可靠性试验的。
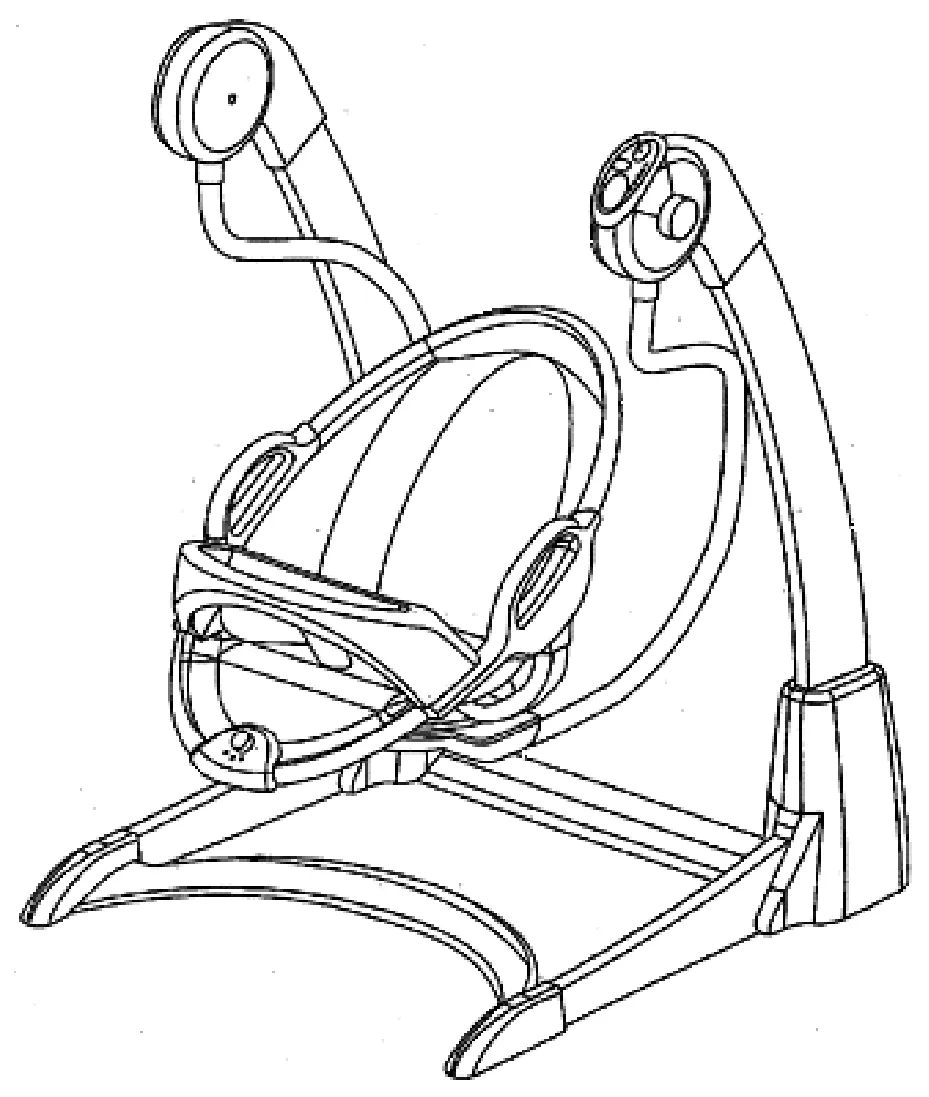
图17 带振动激励的婴儿摇床Fig.17 Infant swing with vibration
程家军等[34]对舰载环境的振动摇摆特性进行测试分析,提出的“振动、摇摆载荷”契合于本文提出的船载机电装备所受载荷。该测试包括船体受海浪作用产生的船体摇摆(主要为横摇和纵摇),在航行时受到来自发动机、螺旋桨和柴油发电机等各种周期或非周期性的振动,以及在作战环境下承受各种舰载武器系统工作所引发的剧烈振动和冲击激励。针对某特定型号舰船的测试分析虽然具有局限性,但为舰载装备在舰载环境下的适应性和可靠性研究等工作的深入开展打下了技术基础。
4 结 论
本文对振动和摇摆载荷下的可靠性模拟试验技术分别进行了调研分析,结果如下:
(1) 振动载荷下的模拟试验,试验台一般有机械式、电磁式、电液式三种结构,根据试验对象的不同工作环境选择进行正弦定频试验、随机试验或时间历程复现试验,不同类型的试验涉及不同的控制算法。振动试验标准规定了按照产品真实工作环境选择施加等效的振动载荷,规定了振动的幅值、频率、振动加速度等重要参数。
(2) 摇摆载荷下的模拟试验,试验台可分为电动式和电液式两大类,一般采用正弦定频或正弦扫频试验,不同试验类型涉及不同控制算法。摇摆试验标准规定了摇摆参数的量级,包括摇摆角度、摇摆周期等。
(3) 振动、摇摆一体化模拟试验,目前国内外还没有可直接用于开展试验的研究成果,现有的同时考虑振动、摇摆载荷的试验中,其“振动”皆为低频振动,即船体的垂荡,与本文聚焦的振动有本质上的区别。
由此可见,现有的可靠性模拟试验技术不足以准确地复现出船载机电装备真实的工作情形。因此开展振动、摇摆复合载荷作用下的可靠性模拟试验技术的研究势在必行。
从可靠性角度出发,当涉及多种载荷时,如何施加载荷,实现试验对象受到的载荷激励得以耦合,即互相增强或互相削弱,是该方向研究难点之一。这需要通过设计耦合的机械结构或者复杂的控制策略来实现,将会是未来主要研究方向之一。其次,试验对象在耦合的载荷激励下,其动态响应是否与试验欲复现的工况一致,需要进行对比分析。因此,工况的等效复现,甚至等效加速,都将是研究重点。今后,随着振动、摇摆一体化试验技术的深入研究,更有望制定相应的试验方法,将船载机电装备的可靠性模拟试验体系化、规范化。
猜你喜欢
小哥白尼(军事科学)(2022年8期)2022-09-20
现代仪器与医疗(2022年3期)2022-08-12
环球时报(2022-05-26)2022-05-26
哈尔滨工业大学学报(2022年5期)2022-04-19
装备制造技术(2020年11期)2021-01-26
小哥白尼(趣味科学)(2020年6期)2020-05-22
制造技术与机床(2018年12期)2018-12-23
工业设计(2016年7期)2016-05-04
振动工程学报(2015年1期)2015-03-01
噪声与振动控制(2015年4期)2015-01-01
