基于正交式磁结构及原边功率控制的无人机无线充电系统
2021-09-16 10:07蔡春伟姜龙云张志鹏
电工技术学报 2021年17期
蔡春伟 姜龙云 陈 轶 武 帅 张志鹏
(1. 哈尔滨工业大学(威海)新能源学院 威海 264209 2. 中国人民解放军92578部队 北京 100161)
0 引言
无人机(Unmanned Aerial Vehicle, UAV)具有控制灵活、结构简单、造价低等优点,广泛用于监测、植保、巡检、救灾等方面[1-3]。无人机的飞行时间是衡量其性能的一个重要指标,是决定无人机的飞行范围、获取信息量、执行任务数量与质量的关键因素[4]。因此,如何有效地延长无人机的飞行时间是一个关键问题。
延长无人机的飞行时间目前有两种方法:第一种方法是增加锂电池的容量,但无人机的载重能力有限,锂电池过重会影响其性能;第二种方法是及时地对无人机进行充电,若使用传统的有线插拔充电方式,会耗费大量人力,且降低无人机的灵活性,若充电过程不需要人工干预则会大大提高无人机执行任务的效率[5]。文献[6]提出无人机通过调整飞行的轨迹借助风能来增加飞行时间,但此方法受环境条件的影响过大,并且飞行路径的灵活性不足。文献[7]提出在无人机机翼上安装光伏电池,但此方法过于依赖太阳辐射,仅限制在白天运行。并且这两种技术只能针对固定翼无人机,而多旋翼无人机没有足够的机翼来应用。文献[8]提出激光波束技术给无人机充电,但此方法的电源始终要移动靠近于无人机,增加无人机运行的成本,而且激光会对生物体造成严重危害。
无线充电可以通过非物理直接接触实现能量的无线传输,具有高安全性、强可靠性和易于实现充电过程自动化的优势[9],因此无线充电技术在电动汽车充电[10-11]、机器人充电[12]等多领域得到了广泛研究。无人机的高效自主无线充电将是推动无人机发展的创新性方法,采用无人值守的充电基站对无人机进行无线充电,可以弥补其短时运行的局限性。
目前关于无人机无线充电技术的研究还较少。文献[13]将一个小型接收线圈安装在无人机起落架底部,此耦合装置的磁场作用空间小,对无人机的设备产生影响较小。然而小的接收线圈导致其捕获磁通的能力较差,无法进行大功率传输。文献[14]提出将接收线圈围着四轴无人机的机臂来绕制,研究了效率为71%的35W无人机无线充电系统,但该系统未对闭环充电控制开展研究。此接收线圈会造成无人机整体的体积增加,妨碍其灵活性和机动性,使无人机极易受到外界环境的影响和破坏,影响系统的稳定性。文献[15]研制出了一款最大充电效率为63.4%的51W六翼无人机无线充电系统,提出将接收线圈悬空横放在无人机的两机翼间的机侧,接收线圈的质量以及外界环境都会容易使六翼无人机不平衡,难以操控。文献[16]提出将平面空心接收线圈放置于机架的中心板下,系统传输功率为70W,效率为89%,使用副边DC-DC电路对系统进行恒流充电。此系统的接收线圈占据了无人机下方的大部分空间,无人机云台等设备无法安装,并且接收线圈的位置也可能会导致磁通进入机体内干扰设备。
由文献分析可知,无线充电技术在无人机充电领域的应用尚未成熟,存在一些问题亟待解决,传统的面对面式的磁耦合装置存在对无人机结构的适应性差、对无人机漏磁干扰强、耦合能力不足的问题,因此有必要结合无人机特殊外形及实际工程特点设计一种新型磁耦合装置。此外,当前无线充电系统广泛采用的副边功率控制会过多增加无人机机载侧的重量,可见研究一种无人机机载侧结构简单、体积小、重量轻的功率控制方案对提升无人机无线充电技术具有重要意义。由于无人机异型结构的特殊性和载荷的有限性,无人机无线充电系统设计需要考虑的四个关键问题为:①磁耦合装置对无人机结构的适应性;②装载于无人机的接收侧的重量;③充电控制方法;④无线充电系统对无人机的电磁干扰。针对以上问题本文设计了一套可靠有效的无人机无线充电系统,该系统使用原边功率控制技术实现对无人机锂电池精确的恒流/恒压闭环充电,提高了无人机充电系统的效率和实用性;使用正交式磁结构的耦合装置,接收线圈较轻,利用Ansys-Maxwell进行了有限元分析,发现此耦合装置具有磁场分布良好、耦合能力强的特点;最后建立了一个500W无人机无线充电样机,验证了该方案的有效性。
1 无人机无线充电耦合装置
1.1 耦合装置结构分析
耦合装置是无线充电系统中的重要部分,其性能决定了系统电能传递能力和传递效率。耦合装置的发射线圈结构决定磁场的分布情况,良好的磁场分布有利于提高耦合装置的电能传输效能。单极性和双极性发射装置的磁场分布如图1所示,图中的闭合曲线为磁力线。单极性发射装置的磁场是以发射线圈的两边为中心向外扩散,线圈中心位置上方磁力线较稀疏,整体磁场较发散。双极性发射装置的磁场是以发射装置的中心位置向外扩散,中心位置上方磁力线较密集,两侧向外发射的漏磁场强度较弱,磁场收敛性较好。因此,本次设计采用了双极性发射装置。

图1 单极性、双极性发射装置的磁场分布Fig.1 Magnetic field distribution of monopolar and bipolar transmitter
针对双极性发射装置,本文通过改变发射线圈的缠绕方式,提出四种发射结构,使用Ansys Maxwell有限元仿真工具对其进行建模分析如图2所示。为对比公平,将四种结构的匝数、铁氧体体积等参数设定一致。根据仿真结果可得Ⅰ~Ⅳ号耦合装置的耦合系数分别为0.328、0.327、0.275、0.296。此外,Ⅰ、Ⅱ号耦合装置的发射平台下方漏磁场强度较弱,磁场分布良好;Ⅲ、Ⅳ号耦合装置下方磁力线较密集,会在发射平台下方产生较多漏磁通。由于Ⅰ号耦合装置的耦合系数最高,磁场分布也更好,故本文选择Ⅰ号双极性平面型发射装置。

图2 Ⅰ~Ⅳ号耦合装置仿真模型及其磁场分布Fig.2 Simulation model of magnetic coupler Ⅰ~Ⅳ and its magnetic field distribution
在磁设计过程中,通常会在原、副边添加铁氧体来增强耦合能力。但易碎的铁氧体如果添加在无人机机载侧,极易在无人机降落过程中损坏。若将接收线圈水平放置在无人机机腹部位置,会占据云台的空间,而且泄露的磁通将进入无人机内部。基于以上原因,本次设计采用一种垂直于充电平台的空心接收线圈结构,如图3所示。形成的无人机无线充电耦合装置如图4所示,发射装置采用了两个发射线圈和放置在线圈下的铁氧体磁心;接收线圈垂直放置,能有效地接收发射装置发出的水平磁通,实现发射装置与接收装置的有效耦合;铁氧体下方放置铝板,可起到增加耦合装置机械强度及漏磁屏蔽的作用。相比传统的面对面式耦合装置,所提出磁耦合装置的接收线圈和发射线圈气隙小,耦合能力强;接收线圈不改变无人机外形,占用无人机空间小,质量轻,易安装。
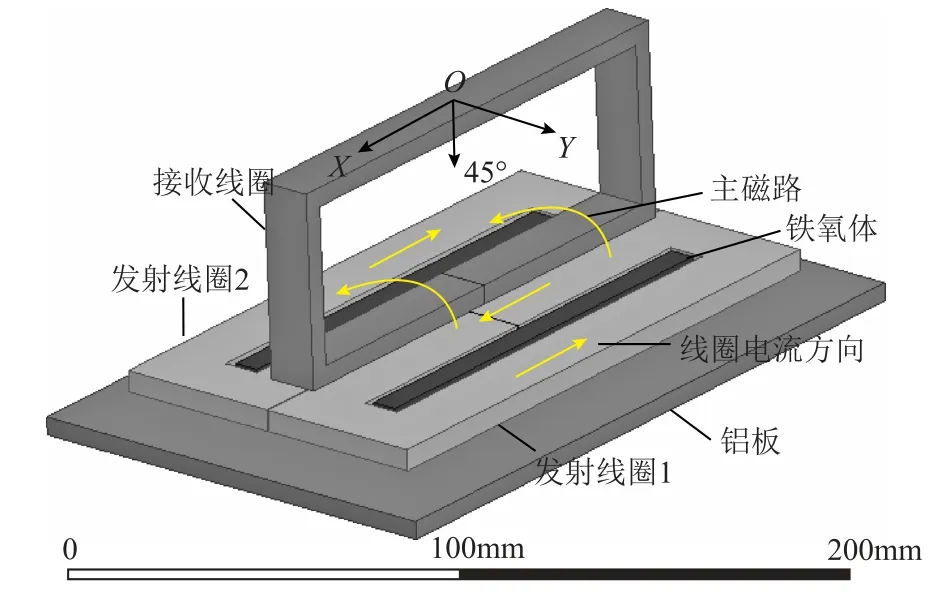
图3 无人机正交磁耦合装置磁结构Fig.3 Orthogonal magnetic structure for UAVs
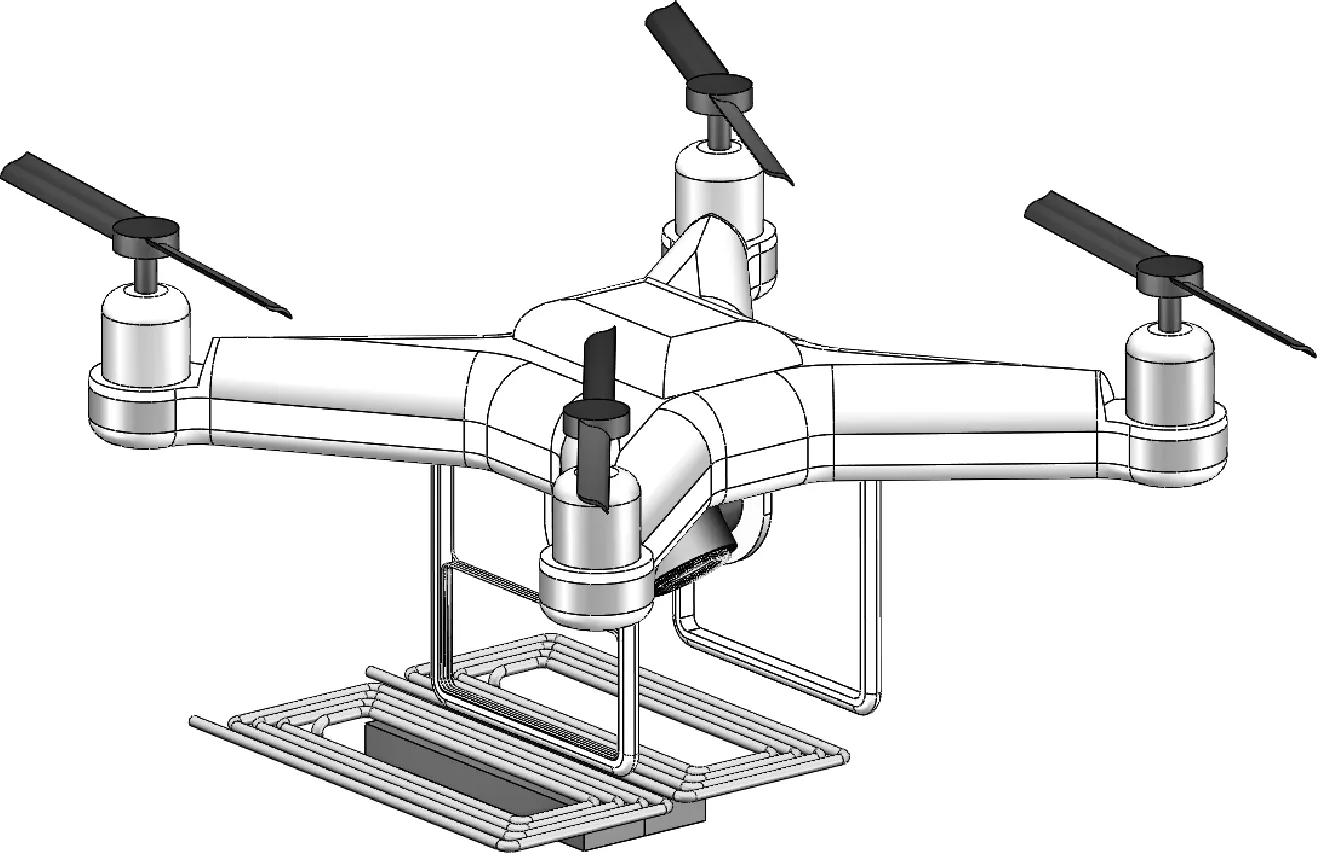
图4 无人机无线充电示意图Fig.4 Diagram of the UAV wireless charging system
根据无人机起落架的尺寸结构,设计的耦合装置参数见表1。系统漏磁是无线充电系统设计需要考虑的重要方面,使用Ansys Maxwell有限元仿真工具构建耦合装置的仿真模型,其横截面磁场分布情况如图5所示。可以发现,发射磁场分布在发射平台附近,而且接收线圈可以较好地捕获发射磁通。
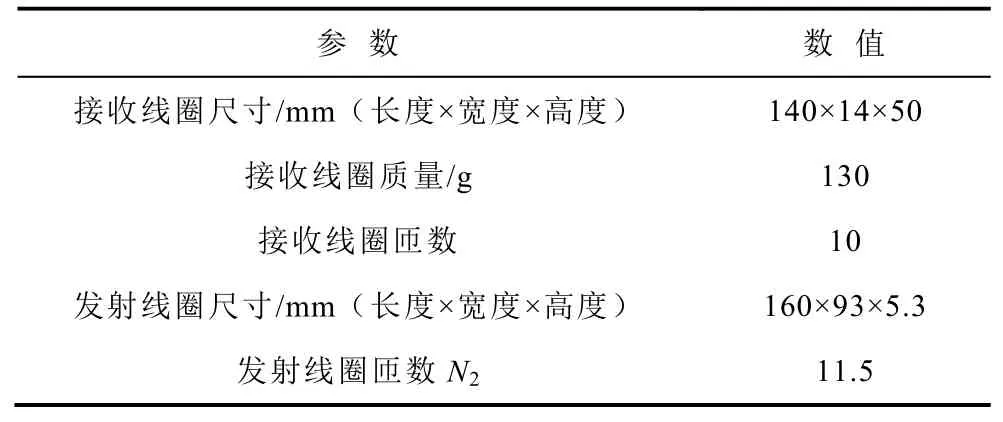
表1 耦合装置参数Tab.1 Parameter of magnetic coupler
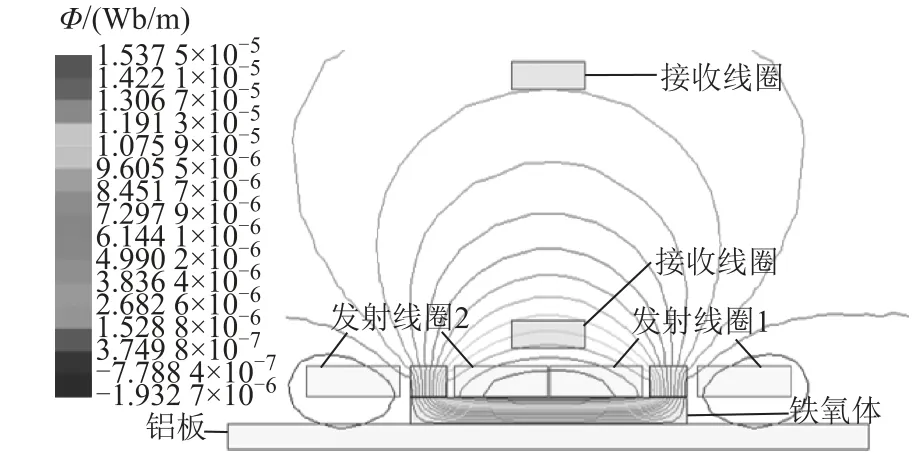
图5 正交磁耦合装置横截面磁场分布Fig.5 Cross section magnetic field distribution of orthogonal magnetic coupling device
1.2 耦合装置容错位能力分析
无人值守无人机的自主精确降落技术配合无人机充电基站内的辅助对准的机械装置,可以确保无线充电系统处于良好对准的情况下进行充电[17-19]。但在特殊情况下可能会出现小范围的错位,为了使无线充电系统能正常运行,需要耦合装置具有一定的容错位能力。恒定的电感是原边和副边补偿电路稳定工作的基础,恒定的互感是稳定功率传输的基础。因此,耦合装置的互感以及原、副边的自感随错位变化程度决定容错位能力的强弱。
为了测试耦合装置的容错位性能,以发射线圈中心为原点,将接收线圈在X轴、Y轴和夹角45°方向进行偏移测试,错位方向标注如图3所示。分别测试原边、副边电感和互感随错位变化情况,如图6所示。由测试结果得到,在三个方向0~20mm偏移范围内,原边自感在±1μH范围内发生变化,副边自感在±0.5μH范围内发生变化,电感值变化小,系统的稳定性受原副边自感变化的干扰小。当在X轴方向的0~20mm范围内出现偏差时,互感几乎是恒定的;当在45°方向偏移20mm处时,互感值下降28.3%;当在Y轴方向偏移20mm处时,互感值下降55.6%。本文耦合装置X轴方向比Y轴方向具有更强的容错位能力。

图6 偏移时耦合装置参数变化情况Fig.6 Parameters variation of coupler with misalignmen
2 无人机无线充电原边功率控制系统设计
2.1 系统总体设计
功率调节电路的作用是调节系统输出电流及电压,实现电池的恒流及恒压(CC/CV)充电任务。副边功率控制不依赖无线通信电路,可靠性更高,但会过多增加无人机负重[20-21]。为了使无线充电系统对无人机产生影响最小化,本文采用原边功率控制方法,通过调节逆变器的输出电压来控制充电功率。本文所设计的无人机无线充电系统整体方案如图7所示。直流电源Ubus经高频逆变部分将直流电逆变成可控的100kHz的交流方波,经原边补偿网络将电能传输给原边线圈。耦合装置通过磁耦合将原边电能传输给副边线圈。副边补偿网络补偿副边线圈无功后输入副边整流部分,再由副边整流部分将交流电整流输出直流电给电池负载充电[22]。恒流/恒压闭环充电过程中,原、副边的控制器通过无线通信进行数据传输,原边控制器实时获得电池负载端的电压电流值,采用增量式PID控制逆变桥输出,进而实现控制系统充电功率。利用无线通信模块,原边充电平台控制器可以实现无人机检测、启动或停止充电、过电流保护等功能。
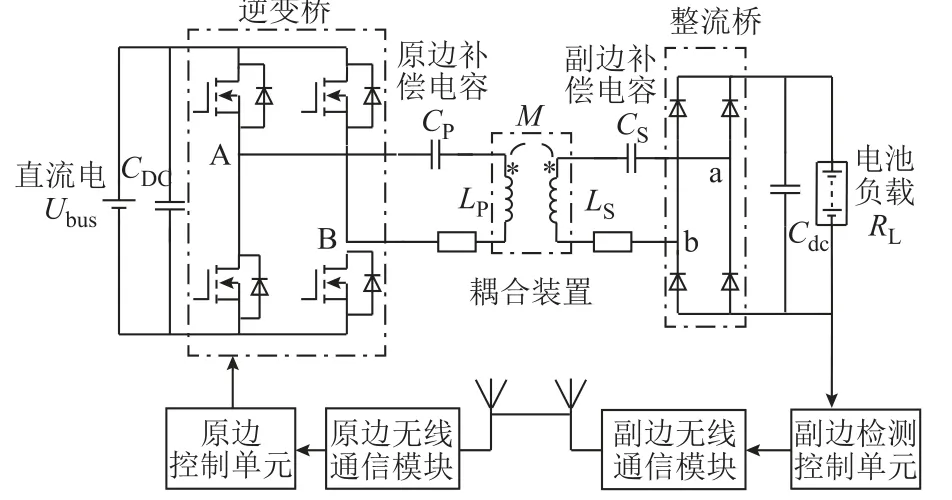
图7 系统整体方案Fig.7 Overall scheme of the system
无线充电的基本补偿网络有四种,分别为原边串联-副边串联(Series-Series, SS)、原边并联-副边串联(Parallel-Series, PS)、原边串联-副边并联(Series-Parallel, SP)、原边并联-副边并联(Parallel-Parallel, PP)[23]。SS与SP补偿方式的补偿电容取值与负载电阻无关。而PS和PP补偿方式的补偿电容取值与负载电阻有关,在充电过程中电池等效负载电阻的阻值会发生变化,系统电路无法一直处于谐振状态,不能实现高效率传输[24]。相比SP补偿结构,SS补偿的输出具有恒流特性,更适合于电池充电场合,故本文采用了SS补偿结构。
2.2 原边控制拓扑分析
为了在不增加其他硬件电路基础上实现系统功率调节,本文对逆变器实行移相控制,逆变器的栅极驱动信号和输出电压如图8所示。开关管S1与S2的驱动信号是互补的,开关管S3与S4的驱动信号是互补的,通过改变开关管S1、S2的驱动信号与开关管S4、S3的驱动信号的移相角φ(0°≤φ≤180°)就可以改变逆变桥输出电压的大小[25]。

图8 逆变桥移相控制时序图Fig.8 Phase shift control sequence diagram of inverter
图9 为处于谐振状态下的移相控制的逆变电路模态图。在t0~t1时,开关管S1、S4导通,UAB=Ubus,逆变电路工作在模态Ⅰ;在t1~t2时,S4关断,由于PWM信号有死区间隔,此时电流会沿S1和VD3进行续流,UAB=0,逆变电路工作在模态Ⅱ;在t2~t3时,S3导通,电流先保持正向流动,电路继续工作在模态Ⅱ,由于处于谐振状态,电流IP逐渐减小到0,之后经S3和VD1反向进行续流,UAB=0,逆变电路工作在模态Ⅲ;在t3~t4时,S1关断,UAB=0,逆变电路继续工作在模态Ⅲ;在t4~t5时,S2导通,UAB=-Ubus,逆变电路工作在模态Ⅳ;在t5~t6时,S3关断,电流沿S2和VD4进行续流,UAB=0,逆变电路工作在模态Ⅴ;在t6~t7时,S4导通,电流先保持逆向流动逐渐减小到0,之后电流变为正向经S4和VD2进行续流,UAB=0,逆变电路工作在模态Ⅵ;在t7~T时,S2关断,UAB=0,逆变电路保持工作在模态Ⅵ;在T时刻后,逆变电路工作在模态Ⅰ,开始新的周期。

图9 移相控制的逆变电路模态图Fig.9 Mode diagram of inverter circuit for phase shifting control
由分析可知,逆变桥的输出电压为

通过傅里叶分解得到逆变桥输出电压有效值为

由式(2)可知,调节移相角φ可改变逆变器输出电压UAB。
2.3 系统拓扑分析与参数确定
无线充电系统的电路模型如图10所示,UAB表示逆变器输出电压,Req表示表示整流器和电池的等效负载,LP、LS是原、副边电感,CP、CS是原、副边补偿电容,IP是原边线圈中电流的有效值,IS是副边线圈中电流的有效值。

图10 无线充电系统的电路模型Fig.10 The circuit model of the wireless charging system
通过傅里叶分解可得到输出充电电流Idc为

由基尔霍夫电压定律可知,图10能够被描述为

式中,ω为逆变器的角频率。
副边电路对原边电路的反射阻抗为

当电路参数满足式(6)时,副边回路对原边回路的反射阻抗虚部为零,副边回路总阻抗为纯阻性,这可有效提高原边补偿网络谐振稳定性。

此时,输入阻抗保持为纯阻性,系统谐振频率不受负载电阻的影响,并且该状态不会受耦合装置互感变化影响。
在谐振状态下,将式(4)代入式(3)得到输出充电电流Idc为

进一步可得输出充电电压Udc为

式中,RL为电池充电时的等效电阻。由式(7)和式(8)可得到:调节原边逆变器的移相角φ可以实现Idc和Udc的输出控制,从而调节电池的充电功率。
2.4 闭环控制系统设计
系统控制流程如图11所示,副边程序的主要功能是在定时器中断时进行ADC采样,采集电池电压、电流值并滤波,然后利用SCI功能通过无线通信模块把检测到的电压电流值发送到原边控制器。原边程序的主要功能是通过SCI模块的接收中断获得电池负载端电压、电流数值,通过PID控制运算程序使逆变器的驱动信号发生改变,实现恒流/恒压闭环充电控制。在PID运算程序中,首先判断此时的电池电压值是否达到从恒电流充电转变为恒电压充电的电压设定值,若没到此设定值则进行恒电流充电,反之则进行恒压充电。在恒压充电时,随着充电过程的进行,电流值逐渐减少,当电流值到了电流设定停止值时,PWM停止输出,充电过程结束。

图11 系统控制流程Fig.11 Control flow chart of the developed system
3 系统实验
使用前文所描述的磁耦合装置和原边功率控制技术搭建实验系统,如图12所示。由式(6)可计算补偿电容,电路参数见表2。

表2 系统电路参数Tab.2 Parameter of magnetic coupler

图12 无线充电实验系统Fig.12 Wireless charging experiment system
利用Aaronia PBS-H4磁场探头测量接收线圈上方和无人机腹部的磁通密度,测量结果如图13所示。对测量位置的正交坐标XYZ三个维度方向分布进行检测,测得接收线圈上方的磁通密度分别为5.14μT、4.74μT、4.63μT,无人机腹部的磁通密度分别为4.74μT、2.64μT、4.63μT,对测得的磁通密度数据取向量平均值,可得接收线圈上方的磁通密度为4.84μT,对地200mm高度的无人机腹部位置磁通密度为4.0μT,均低于人体安全磁通密度值27μT[26]。由测试结果可知,无线充电系统对无人机电磁干扰弱。

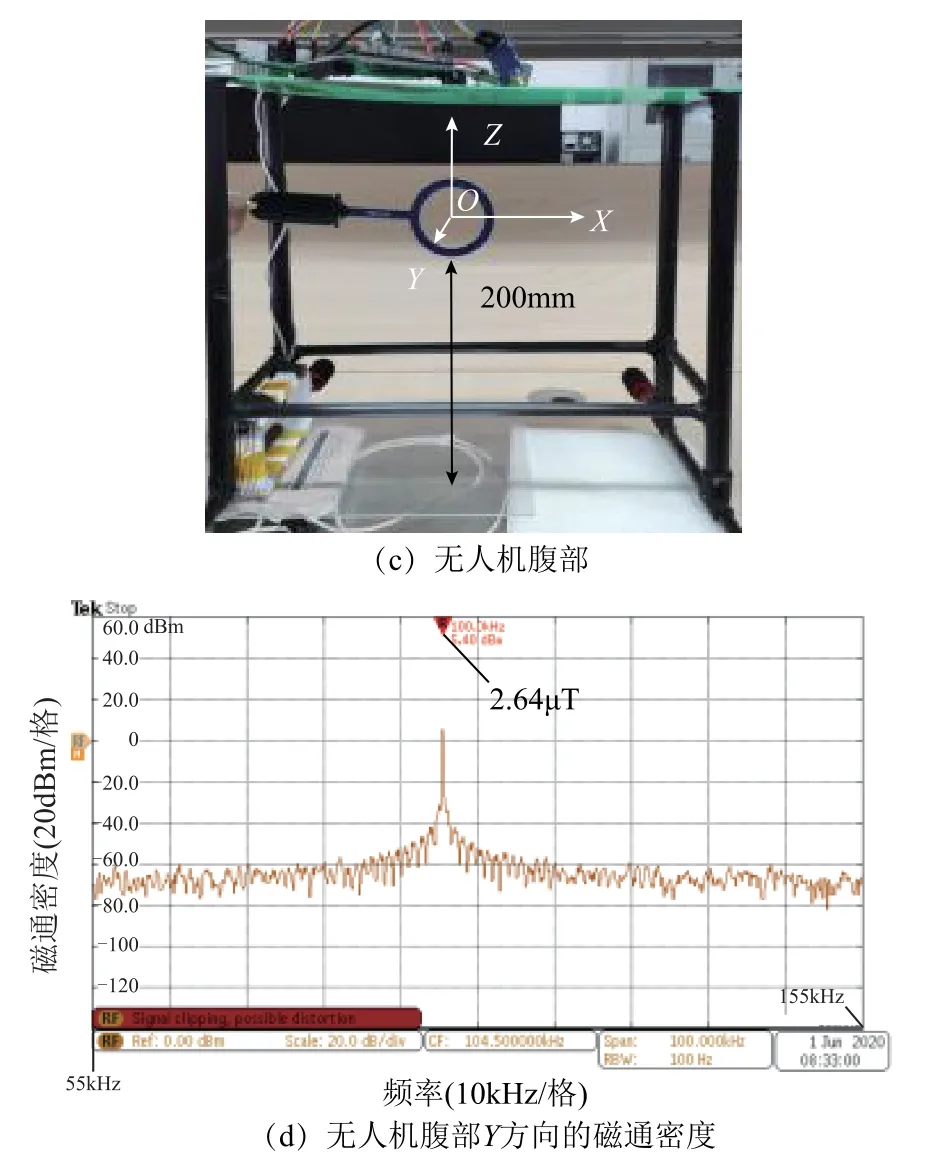
图13 磁通密度测试Fig.13 Flux density test
在输入电压100V、系统工作频率100kHz、良好对准的工作条件下,对系统进行测试。系统实验波形如图14所示,从图中可看出逆变器的输出电压UAB和原边电流IP是同相位的,电路处于谐振状态。利用功率分析仪测试系统的电能传递能力如图15所示,充电电流为10.042A,充电电压为50.596V,同时输出功率为508W,整个系统效率为90.86%。
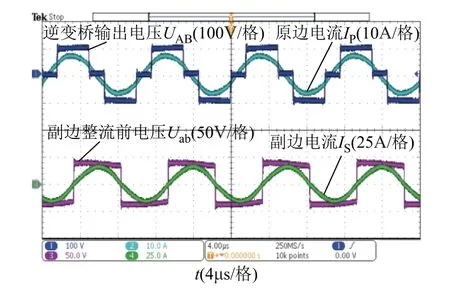
图14 系统测量波形Fig.14 Measured waveforms of system
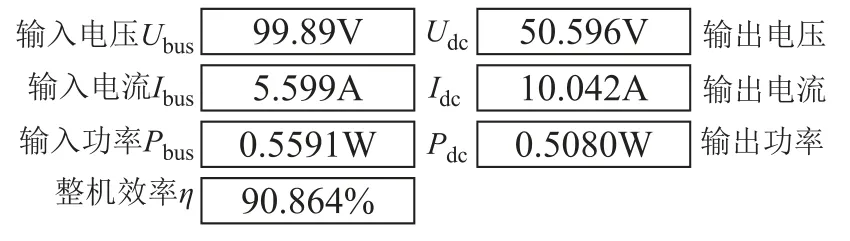
图15 输入输出功率测试Fig.15 Input and output power test
锂电池充电过程中的第一阶段是以10A恒定电流充电,第二阶段是以50V恒定电压充电。本次实验未使用实际锂电池,而是利用可编程电子负载模拟电池充电特性。恒流充电阶段充电电流Idc为10A,充电电压Udc可能变化范围是30~50V,对应等效负载电阻RL变化范围是3~5Ω;恒压阶段Udc为50V,Idc由10A降至2A以下时截止,对应RL变化范围是5~25Ω。图16显示了恒流10A充电下输出电压随等效负载电阻变化和恒压50V充电下输出电流随等效负载电阻变化的测试结果。结果显示系统实际输出电压电流和设定值一致,此无线充电系统可实现恒流/恒压闭环充电。

图16 系统闭环充电实验测试Fig.16 Closed loop charging test of the system
为了测试在耦合装置发生错位时无线充电系统的运行状态,在等效负载电阻为5Ω的最大输出功率点下,开环测试X、Y轴和沿夹角45°方向三种整体错位情况下的系统的整机效率和充电电流Idc变化情况,实验结果如图17所示。由测试结果可知,在等效负载电阻为5Ω时,系统在X轴方向[0, 55mm]范围内偏移、在Y轴方向[0, 20mm]范围内和沿夹角45°方向[0, 25mm]范围内整体偏移时,充电电流都在10A以上,整机效率都在85%以上,在此范围内的X、Y轴和沿夹角45°方向整体错位过程中,无线充电系统可以实现正常充电运行。
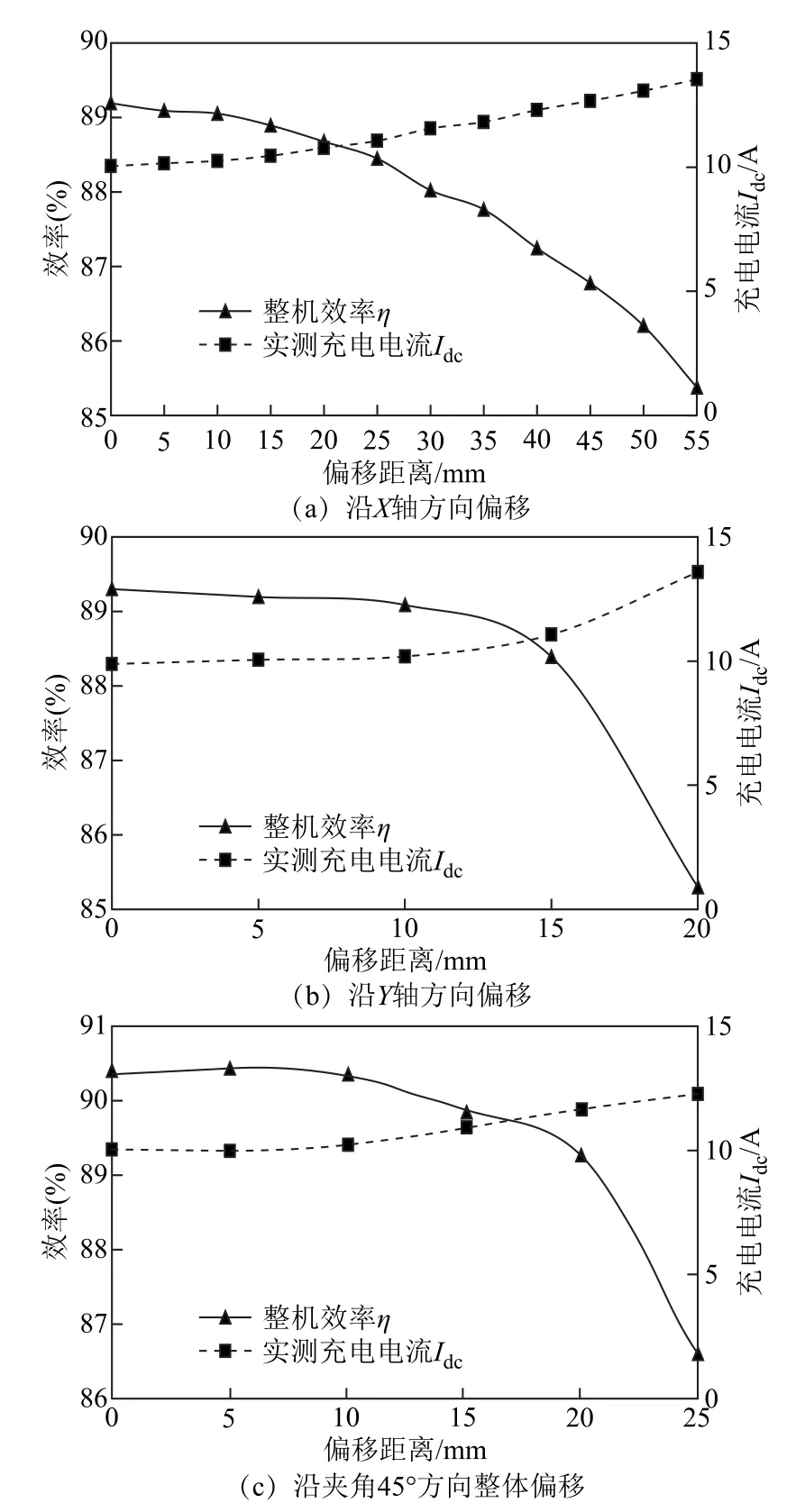
图17 系统错位开环充电实验测试Fig.17 Open-loop charging experiment of the systen with misalignment
4 结论
本文对无人机无线充电的磁耦合装置、能量传输拓扑、功率控制系统进行了设计与分析,设计了应用于中大型多旋翼无人机的接收侧轻量化无线充电系统。使用了一种接收侧重量为130g的正交磁结构的耦合装置,对其磁场分布和容错位能力进行了分析与实验。采用原边功率控制技术实现对无人机锂电池的充电控制,减轻了机载负重,提高了系统的效率和实用性。设计了系统能量传输拓扑,并完成了系统的闭环设计。实验结果表明本文无人机无线充电系统可有效地传输500W充电功率,整个系统效率为90.86%,可实现恒流/恒压闭环充电。
猜你喜欢
大电机技术(2022年4期)2022-08-30
当代陕西(2022年6期)2022-04-19
娃娃乐园·综合智能(2021年12期)2022-01-18
中国特种设备安全(2021年5期)2021-11-06
奥秘(创新大赛)(2020年10期)2020-10-28
模具制造(2019年7期)2019-09-25
中学生数理化·高二版(2016年12期)2017-02-28
新高考·高一数学(2016年3期)2016-05-19
Coco薇(2016年1期)2016-01-11
汽车维护与修理(2015年6期)2015-02-28