台车干扰加速度下的ACNS触发算法可靠性研究
2021-09-14 02:45吕羽竞张玉辰
重庆理工大学学报(自然科学) 2021年8期
陆 颖,吕羽竞,张玉辰
(江苏大学 汽车与交通工程学院, 江苏 镇江 212013)
效率和准确性是ACNS可靠性主要的衡量指标[8]。对于以加速度信号触发的ACNS,其触发算法的可靠性直接影响到ACNS的可靠性。在多种加速度信号触发算法中,加速度峰值法只需要设置一个触发阈值,当检测到车身加速度峰值超过触发阈值时就对外呼救,具有算法简单、效率高等优点,因此是工程上应用较多的一种。但是这一算法准确性不高,误触发的概率比较大。从国内外的实践来看,采用加速度峰值法的ACNS往往和以安全气囊点火信号触发的ACNS配合使用,形成双通道式(dual-channel notification)ACNS,从而提升车辆的报警效率,典型的如安吉星(OnStar)系统[9]。
虽然以加速度峰值法触发的ACNS一般不单独使用,但该算法的可靠性仍具有研究意义,这是因为ACNS的频繁误触发报警会分散驾驶员的注意力,如果驾驶员不取消呼救,还会导致救援活动的开展,造成救援资源的浪费。触发阈值的设定直接影响到加速度峰值法的可靠性。目前,触发阈值的设定主要通过颠簸道路、紧急制动试验得出。Xiao W等[10]考虑了紧急制动和过减速坎后,将触发阈值设定为2g(1g=9.8 m/s2)。贾丰源[11]考虑了车辆通过不同高度的路障的情况,将ACNS运行的阈值设为6g。葛如海等[12]分析了车辆在卵石路、搓板路以及石阶上的车身加速度,将触发阈值设为5g~16g。由此可见,不同的研究文献中对这一阈值的设定差别很大。
在车辆行驶过程中,由于动力装置振动、路面颠簸等会产生车辆振动[13],由此引起的干扰加速度会影响到加速度峰值法对碰撞事故的识别。台车碰撞试验是进行ACNS终端可靠性检测的关键步骤[11,14]。由于台车的晃动、橄榄头中心未对准吸能管中心等原因,台车在碰撞初始阶段受到了来自其他方向的力,会使碰撞开始时加速度信号有明显的大幅度振荡,使单一触发阈值的ACNS终端可能出现误触发现象。因此,研究台车干扰加速度下的ACNS触发算法的可靠性对于研究ACNS触发算法在颠簸路面行驶、动力装置振动等情况下的可靠性具有重要的借鉴意义。
国内外关于台车干扰加速度对ACNS触发算法影响的研究目前还较为少见,本文首先通过有限元软件LS-DYNA建立台车碰撞仿真模型,并通过试验验证仿真模型的准确性。然后,分析由台车振动引起的干扰加速度,并对其进行正态性检验。继而,在仿真加速度的基础上,加入服从正态分布的干扰加速度,统计加入干扰加速度前后ACNS误触发、漏触发的次数,并分析干扰加速度正态分布参数对触发算法的影响,对触发算法的可靠性进行研究。最后,通过ACNS终端试验,验证干扰加速度下触发算法的可靠性。
1 台车碰撞有限元仿真
ACNS触发算法的设计需要进行大量的实车或台车碰撞试验。然而,随着计算机性能的提高以及仿真技术的日益成熟,前期开发可以用有限元仿真代替台车碰撞试验。
1.1 有限元模型的建立
中国某试验场DAPG-QJ-MNPZ型台车碰撞试验系统如图1所示,主要应用于汽车安全带动态性能试验、汽车座椅动态强度试验等安全部件法规试验。

图1 台车碰撞试验系统场景图
现根据台车碰撞试验系统实际尺寸建立如图2所示的有限元模型,包括台车、轨道、缓冲吸能装置、壁障等。其中,台车的减速运动主要通过缓冲吸能装置实现,装在台车前部的橄榄头插入聚氨酯吸能管,引起吸能管的弹塑性形变,从而起到减速停车的作用[15-16]。因此,作为有限元分析的主要形变部件,缓冲吸能装置的网格划分较密,如图3所示。另外,聚氨酯吸能管采用聚氨酯材料,其余部件均采用45号钢,材料主要参数如表1所示。
纳入标准:①3岁≤年龄≤12岁;②符合中华眼科学会斜视弱视学组(2011)中的弱视诊断标准[3]:视觉发育期由于单眼斜视、未矫正的屈光参差和高度屈光不正及形觉剥夺引起的单眼或双眼最佳矫正视力(BCVA)低于相应年龄的视力(4~5岁≤0.5,6~12岁≤0.7),或双眼视力相差2行以上;③诊断为屈光参差性弱视[需具备相关危险因素如双眼远视性球镜度数相差1.50 D和(或)柱镜度数相差1.00 D[3]];④能配合本研究的各项检查;⑤未戴镜矫正,且以往未进行过弱视训练;⑥患儿监护人自愿签署知情同意书。

图2 台车碰撞试验系统有限元模型示意图
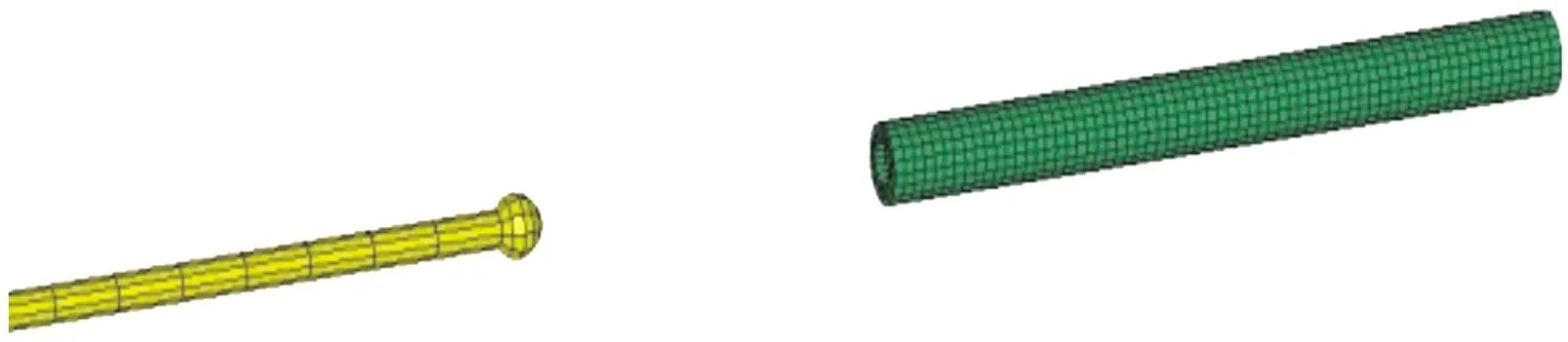
图3 缓冲吸能装置网格划分示意图
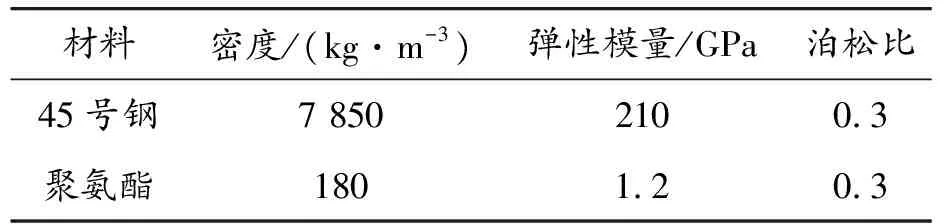
表1 有限元模型材料的主要参数
1.2 有限元模型的验证
参考欧洲ECE R94对安全气囊的点火要求,将20 km/h作为ACNS触发的临界车速。以20 km/h速度进行台车碰撞试验和仿真碰撞试验,得到的碰撞加速度曲线如图4。可以发现,试验曲线存在明显的大幅度振荡,一方面台车与轨道有摩擦,另一方面在碰撞过程中台车和轨道之间产生振动;而仿真模型未能考虑台车振动加速度,并且台车与轨道的摩擦系数设置为定值,因此加速度曲线不存在较大的波动。

图4 仿真与试验台车碰撞加速度曲线(20 km/h)
图5为经过滤波处理后的20 km/h时仿真与试验台车碰撞加速度曲线。所用的滤波器为cfc60,该滤波器在车辆碰撞相关研究中经常使用[17]。

图5 滤波后仿真与试验台车碰撞加速度曲线(20 km/h)
仿真中台车在37 ms时达到加速度峰值-17.27g,并在60 ms时停止运动;试验中台车在43 ms时达到加速度峰值-16.93g,并在61 ms时停止运动。从加速度曲线轨迹、加速度峰值出现时间、加速度峰值、台车停止运动时间这些方面考虑,仿真与试验加速度曲线均有较好的吻合度,因此该有限元模型可以用于后续ACNS触发算法的可靠性研究[18]。
2 干扰加速度正态检验
图6~8是汽车通过不同路面的加速度波形曲线[19]。其中,图6是汽车以60 km/h通过搓板路的加速度波形曲线,图7是汽车以50 km/h通过110 mm台阶的加速度波形曲线,图8是汽车以50 km/h紧急制动的加速度波形曲线。
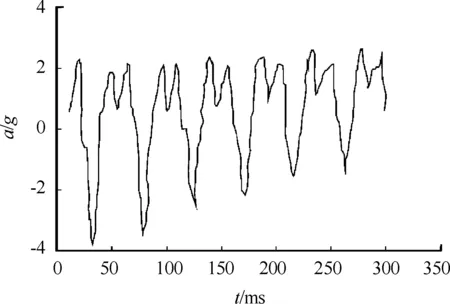
图6 汽车以60 km/h通过搓板路的加速度波形曲线

图7 汽车以50 km/h通过110 mm台阶的加速度波形曲线

图8 汽车以50 km/h紧急制动的加速度波形曲线
而台车在运动过程中,由于牵引力不恒定、与轨道间摩擦系数不断变化等原因,自身会不断前后振动,产生影响触发算法可靠性的干扰加速度。
由于实际路况复杂,通过图6~8可知,加速度的最大区域在-6g~6g。图9为台车碰撞试验滤出的干扰加速度曲线。可以看出,台车干扰加速度覆盖了这几种路面工况下的可能发生的加速度区间。

图9 干扰加速度
由图9可发现,加速度信号沿着x轴上下波动,实际表现为台车的前后振动。另外,曲线在0~60 ms时幅值稍大,这是由于台车前部橄榄头与吸能管相接触时产生剧烈振动造成的。对干扰加速度进行正态分布拟合,拟合曲线如图10,正态检验分析报表如表2。
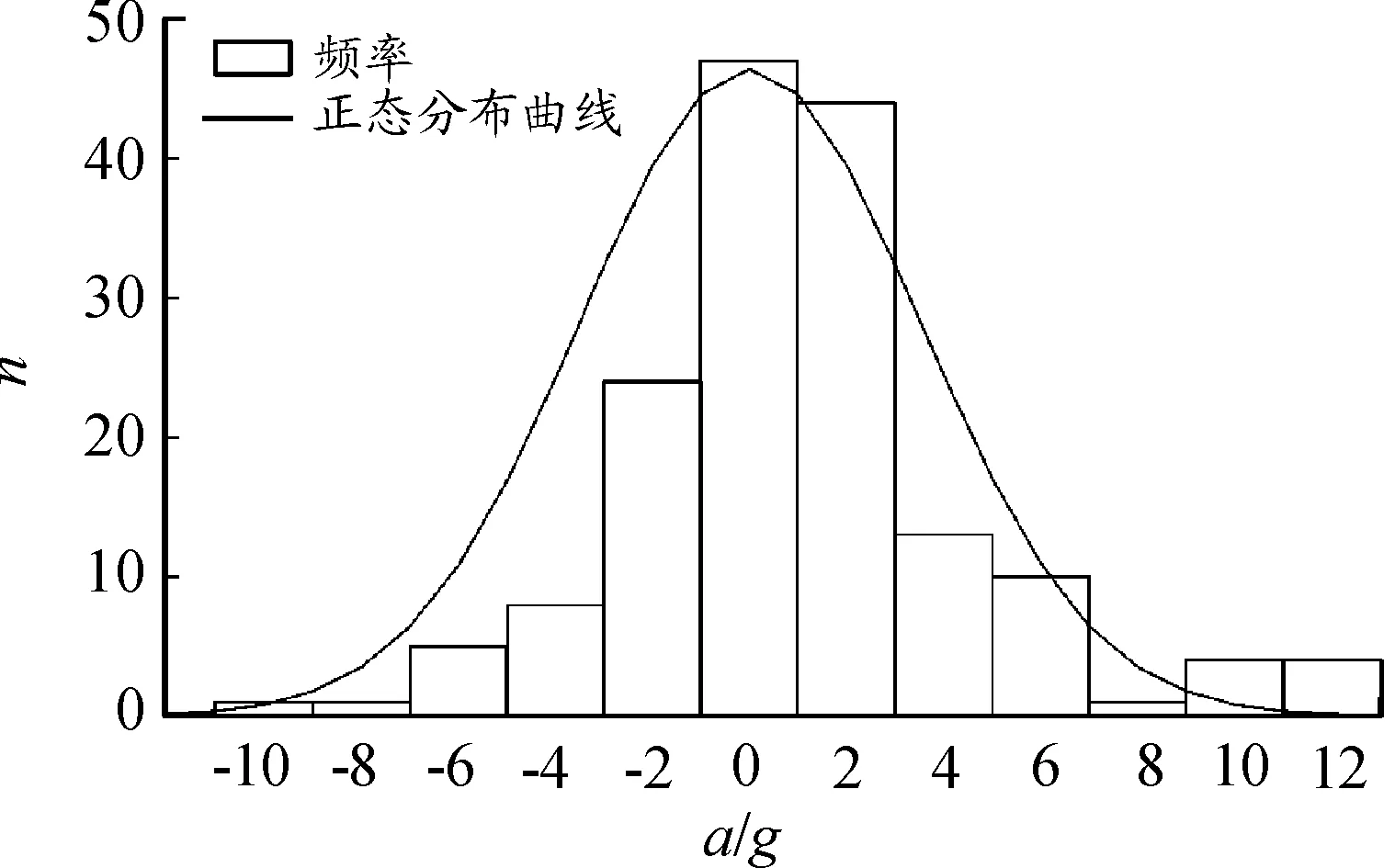
图10 干扰加速度正态分布拟合曲线
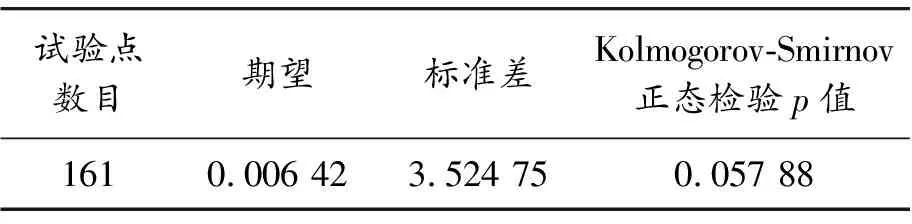
表2 正态检验分析
由表2可知,Kolmogorov-Smirnov正态检验p>0.05,说明干扰加速度服从正态分布[20],且期望为0.006 42,标准差为3.524 75。
3 触发算法可靠性分析
3.1 可靠性分析
加速度峰值法以加速度峰值作为评估参数,判断系统是否需要发出呼救信号。加速度信号在碰撞过程中变化非常快,容易受到车辆振动和路面不平的干扰。虽然,在实际应用中可以通过滤波处理减小干扰加速度的影响,但其仍会不可避免地影响加速度峰值,造成系统误触发或漏触发。
将有限元仿真20 km/h台车碰撞加速度峰值作为触发阈值,设定为-17.27g。在台车碰撞初速度15~25 km/h,间隔0.5 km/h,进行有限元仿真。无干扰加速度时不同碰撞初速度下的加速度峰值如图11所示。
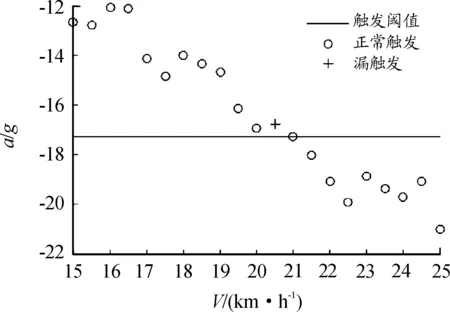
图11 无干扰加速度时不同碰撞初速度下的加速度峰值图
从图11可知,仅在20.5 km/h时发生漏触发情况。同时,可以看出,随着台车碰撞初速度的增大,加速度峰值有增大的趋势。因此,在没有干扰加速度影响时,触发算法具有良好的可靠性。
为了研究干扰加速度对触发算法的影响,通过Matlab R2014随机生成21组期望为0.006 42g、标准差为3.524 75g的正态分布数据,并将其分别输入到仿真的台车不同碰撞初速度下的加速度信号中。图12为有干扰加速度时不同碰撞初速度下的加速度峰值图。
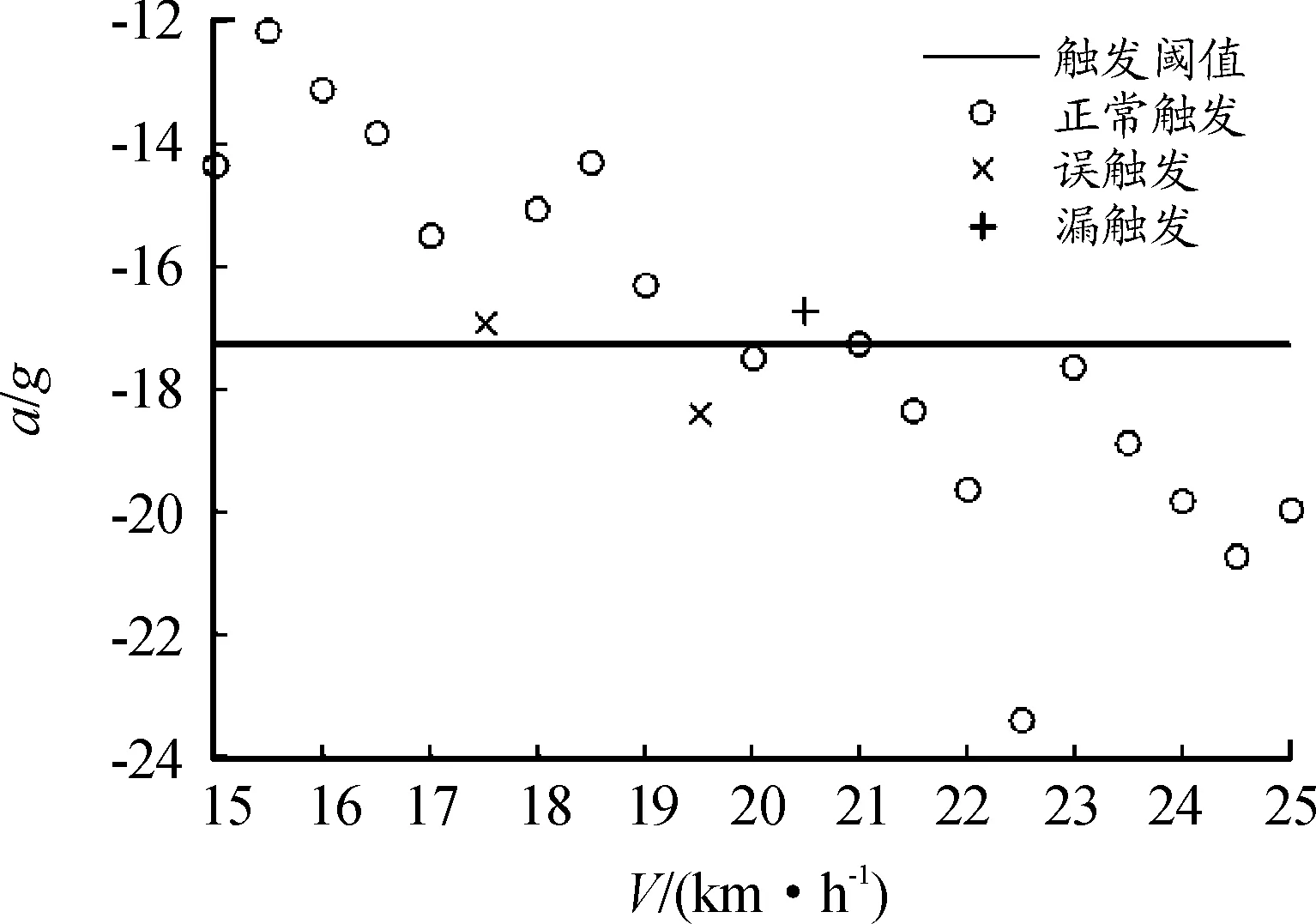
图12 有干扰加速度时不同碰撞初速度下的加速度峰值图
可以看出,考虑了干扰加速度之后,在17.5 h、19.5 km/h时发生误触发,在20.5 km/h时发生漏触发情况,相比于无干扰加速度时,错误触发增多。这是由于滤波处理不能完全滤去干扰加速度,不可避免地影响到加速度峰值,从而降低了触发算法的可靠性。
3.2 参数敏感性分析
由于台车车型、碰撞初速度、台车轨道表面状况的不同,干扰加速度的期望和标准差也不尽相同。因此,有必要研究干扰加速度正态分布参数对触发算法的影响。
设置干扰加速度的标准差为3.524 75g,期望范围为-2g~2g、间隔为0.5g,分别输入到仿真的台车不同碰撞初速度下的加速度信号中,统计触发算法误触发、漏触发的次数。图13为不同期望时触发算法误触发、漏触发次数曲线,可以发现干扰加速度期望为负时,较易出现误触发;期望为正时,漏触发次数明显多于误触发次数。因为期望为负时,相当于整体上给台车提供了同向加速度,导致加速度峰值变大,更易出现误触发;期望为正时,加速度峰值变小,从而发生漏触发。

图13 不同期望时误触发、漏触发次数
设置期望为0.006 42g,标准差为1g~8g、间隔为1g,分别输入到仿真的台车不同碰撞初速度下的加速度信号中,统计触发算法误触发、漏触发的次数。图14为不同标准差时触发算法误触发、漏触发次数曲线,可以看出漏触发次数相对较少,说明标准差的变化对漏触发的影响较小;同时可以看出,标准差较小时,误触发次数相对较少,只有在标准差超过6g时,误触发次数才显著增多,说明只有在车辆振动比较剧烈的情况下才会导致系统容易误触发。
图14 不同标准差时触发算法误触发、漏触发次数
4 ACNS终端试验
ACNS终端框图如图15。ACNS终端以STM32F1精英版为核心,外接三轴加速度传感器,GPS模块和GSM模块。加速度传感器用于实时采集车身加速度信号,GPS模块用于接收地理位置信息,微控制器收集加速度传感器、GPS模块的数据,在判断车辆发生碰撞后,将相关信息整合发送至GSM模块,由GSM模块负责将事故信息发送出去,SD卡用于存储微控制器处理后的碰撞初速度、碰撞过程中的加速度等数据,显示屏用于显示碰撞时的地理位置、碰撞初速度等事故信息。锂电池为整个终端供电。
图15 ACNS终端框图
通过有限元仿真得到碰撞初速度15~25 km/h、间隔1 km/h的11组台车碰撞加速度数据,通过Matlab随机生成11组期望为0.006 42g、标准差为3.524 75g的正态分布数据作为干扰加速度,然后分别加入到仿真的台车不同碰撞初速度下的加速度数据中,最后将包含干扰的加速度数据存储到外部SD卡,输入到ACNS终端,验证触发算法的可靠性。ACNS终端写入加速度峰值法程序,通过读取SD卡中的加速度数据,判断是否发生碰撞,并将碰撞信息显示在LCD显示屏上。系统在19 km/h时发生误触发情况,碰撞过程中的加速度峰值为-16.96g,如图16(a)所示,并对外发送了事故信息;在20 km/h时发生漏触发情况,碰撞过程中的加速度峰值为-16.74g,如图16(b)所示。结果表明,台车干扰加速度会降低触发算法的可靠性。
图16 不同碰撞初速度的ACNS终端碰撞信息显示
5 结论
建立了台车碰撞试验系统的有限元仿真模型,并通过比较20 km/h下的台车和仿真碰撞加速度验证了模型的可靠性。提取台车碰撞试验加速度的干扰加速度进行正态检验,证明干扰加速度服从正态分布。在15~25 km/h进行有限元仿真,得到碰撞加速度信号;加入干扰加速度,比较了触发算法误触发、漏触发的次数,发现干扰加速度的存在会影响触发算法对碰撞事故的判断,导致误触发、漏触发情况增多。通过改变正态分布参数,研究干扰加速度期望、标准差对触发算法的可靠性影响。随着期望的增大,触发算法误触发概率减小,漏触发概率增大。并且,触发算法在标准差较小时,受到的影响较小,只有在标准差较大时,才会显著影响触发算法对碰撞事故的判断。最后通过ACNS终端试验对加入干扰加速度时触发算法的可靠性和干扰加速度正态分布参数敏感性进行了验证,得出的试验结果与分析一致。
猜你喜欢
山东冶金(2022年2期)2022-08-08
昆钢科技(2020年6期)2020-03-29
制造技术与机床(2018年10期)2018-10-13
工业炉(2016年1期)2016-02-27
采矿与岩层控制工程学报(2015年3期)2015-12-16
赤峰学院学报·自然科学版(2015年15期)2015-03-21
汽车科技(2015年1期)2015-02-28
医学理论与实践(2014年23期)2014-03-06
医学理论与实践(2012年4期)2012-12-09
中学生数理化·高一版(2009年6期)2009-08-31