
求解最小包容圆问题的一种有效算法
2021-09-13 14:12王成露
四川师范大学学报(自然科学版) 2021年5期
蔡 园, 蒋 毅, 王成露
(四川师范大学 数学科学学院 可视化计算与虚拟现实四川省重点实验室,四川 成都610066)
1 背景介绍
最小包容圆问题是求解平面上包容所有给定圆的最小的圆,该问题简写为SEC[1].这个问题最初是由Sylvester[2]在1857年提出的,并且可以在线性时间内求解.最小包容圆问题有很多的应用背景,比如规划共享设施的位置、环境科学、模式识别、机械工程以及计算机制图等,具体参考文献[3-6].许多文献都涉及了最小包容圆问题的算法,例如切平面法[7]、二次规划法[3]以及基于Voronoi图的算法[8].最小包容圆问题的数学模型描述为如下形式

其中,(x,y)和R分别代表最优圆的圆心和半径,¯={o1,o2,…,om}表示m个给定的圆,它们的圆心和半径分别为{(a1,b1),(a2,b2),…,(am,bm)}和{r1,r2…,rm}.根据半径的不同,最小包容圆问题又可以分为以下的2种情况:ri=0以及ri>0,其中i=1,2,…,m.对于ri=0,已经有许多文献报道,比如文献[9-10].本文主要研究ri>0的情况,可参考文献[3,7,11]等.在文献[3]中,一共研究了4种著名的算法来解最小包容圆问题,包括二次规划法、次梯度法,随机增量法以及二阶锥规划法.在他们的计算实验中,表明了最好的算法是二次规划法.文献[3]中二次规划法最主要的思想就是把问题(1)转化为如下的一个含有线性约束的二次规划问题
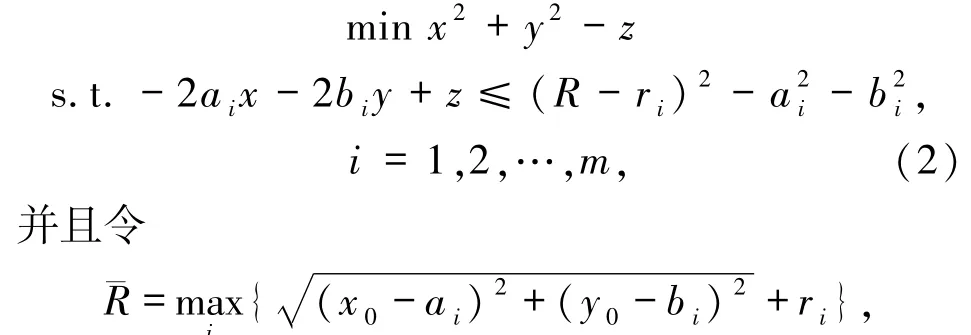
(x0,y0)为任意给定的初始值,此时问题(2)是凸优化[12].在本文数值实验中,与文献[3]中最好的二次规划法进行比较,新算法处理的数据越大越有效.值得提出的是,本文思想来源于文献[13-14]中的方法.
2 算法描述
下面介绍本文提出的新算法.根据文献[3]中的定理2.1,知道最小包容圆问题(1)与非凸二次规划问题(2)在一些条件下是等价的.对于问题(2),是含有非凸约束的二次规划问题.引入一个新变量V来替换平方项R2,并结合文献[15-21]的有关线性松弛的研究,可以得到问题(2)的如下松弛问题

定理2.1问题(3)是问题(2)的线性松弛.
证明设(x,y,R,z)是问题(2)的一个可行解,则满足如下不等式:

根据最小包容圆问题(2)中R和¯R的定义,知道

由(5)和(7)式得,(x,y,R,z,V)(V=R2)是问题(3)的一个可行解.因此,问题(3)是问题(2)的线性松弛.
由定理2.1的证明,可以得到以下引理.
引理2.2当V=R2时,问题(3)与问题(2)是等价的.
问题(3)是含有线性约束的二次规划问题,可以有效地求解.如果V=R2,则问题(3)的最优解是问题(2)的最优解;否则,根据文献[13]中提到的切平面方法,在问题(3)中加入有效的切平面并求解新的二次规划问题.基于这种思想,给出以下求解最小包容圆问题的算法.
算法1
步骤1 初始化:k=0.给定初始点(x0,y0),并计算


再用MATLAB求解问题(9),更新k:=k+1,得到问题(9)的最优解(xk,yk,Rk,zk,Vk).
引理2.3[3]设(x*,y*,R*)是问题(1)的一个最优解当且仅当(x*,y*,0)是问题(2)的最优解,且有R=R*时,问题(2)与问题(1)是等价的.
有关算法1中使用的割平面的研究,可参见文献[13].根据文献[13],可以得到(8)式是有效的切平面且算法1是收敛的.又由引理2.2和2.3,停机准则|xk2+yk2-zk|≤ε和|Rk2-Vk|≤ε是适定的.
定理2.4算法1产生的序列的极限点是问题(1)的最优解.
证明设(x*,y*,R*,z*,V*)是算法1产生的序列的极限点,则有x*2+y*2-z*=0且V*=R*2.由V*=R*2,可以得到V*-2αR*+α2≥0是成立的.因此,问题(3)与问题(2)是等价的,即(x*,y*,R*,z*,V*)是问题(2)的最优解.由引理2.2和2.3可知,(x*,y*,R*)是问题(1)的最优解.
3 数值实验
本节主要比较算法1和文献[3]中二次规划法在MATLAB中的数值表现.所有的测试数据都是随机产生的,每一组圆的产生均满足独立的正态分布N(0,16),每组圆的半径均满足均匀分布U(0,1),并且保证这些圆都是不相交的.在数值实验中,取初始值(x0,y0)=(0,0),ε为10-6.测试了不同大小的随机例子,m的范围是从18 000到30 000.对于不同的m,分别取50组随机产生的数据进行计算,再求这50组数据得到的平均值.产生的结果是在内存4 GB、2.5 GHz英特尔酷睿处理器的个人电脑中得到.数值结果概括到表1~4中.在这些表中,m代表圆的个数,k代表算法1产生的迭代次数,nA是平均迭代次数,nmax是最大迭代次数,nmin是最小迭代次数,t是平均CPU时间(单位用s表示),QP[3]表示文献[3]中的二次规划法,Delta-T表示2种算法的时间差.最终的数值结果表明算法1处理的数据越大速度比二次规划法越快.
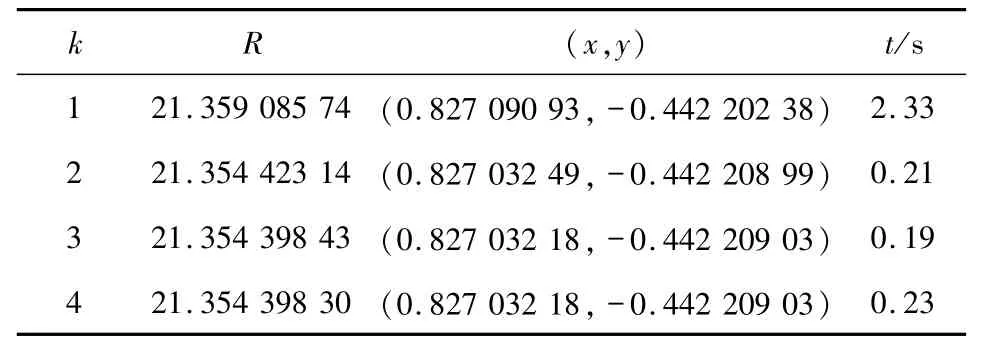
表1 m=30 000时,算法1每次迭代的计算结果Tab.1 Computational results for 30 000 circles by the Algorithm 1
表1给出了当m=30 000时,算法1求解最小包容圆问题的迭代次数及每步迭代所用的CPU时间.值得注意的是在k=3和k=4时,圆心已经相等.
表2给出了算法1的迭代次数.已知圆的个数m是从18 000到30 000之间取了5组值,针对同一组m分别取50组随机数据所得的平均值结果.其中算法1的平均迭代次数约是4,最大迭代次数是6,最小迭代次数是3.不难发现随着已知圆的个数m的逐渐增加,算法1的迭代次数几乎没有变化.因此,可以得出算法1的迭代次数与圆的个数之间没有联系.

表2 算法1的平均迭代次数Tab.2 The number of iterations on Algorithm 1
表3给出了QP[3]与算法1求出的最优值.对于同一组m,可以看到2种算法求出的最优值是相同的.

表3 2种算法的最优目标值Tab.3 Objective function value of two methods
表4给出了QP[3]与算法1的平均CPU时间差.数据结果表明,当已知圆个数m取18 000到22 000时,算法1与QP[3]的计算时间几乎相等.但随着已知圆个数m(大于22 000)的逐渐增加,算法1的计算速度比QP[3]更快.当m=30000时,QP[3]的平均CPU时间约是算法1的1.6倍.因此,数值结果验证了算法1的有效性.

表4 2种算法的平均CPU时间Tab.4 Average running time of two methods
图1给出了m=9时,由算法1产生的最小包容圆.可以清楚地看到,算法1求出的最优圆是非常精确的.

图1 给定9个圆,由算法1产生的最小包容圆Fig.1 The smallest enclosing circle for nine circles by Algorithm 1
猜你喜欢
数学物理学报(2022年4期)2022-08-22
智能建筑电气技术(2022年2期)2022-02-06
小学生学习指导(低年级)(2021年9期)2021-10-14
商用汽车(2021年4期)2021-10-13
中学生数理化·高一版(2021年2期)2021-03-19
阅读与作文(小学高年级版)(2020年8期)2020-09-12
中学生数理化·七年级数学人教版(2019年10期)2019-11-25
小学生学习指导(低年级)(2019年9期)2019-09-25
制造技术与机床(2019年4期)2019-04-04
中央民族大学学报(自然科学版)(2018年3期)2018-11-09
