车辆辅助紧急制动系统研究与应用
2021-09-10 07:22任德鸿
内燃机与配件 2021年6期
任德鸿

摘要:本文介绍了车辆辅助紧急制动系统在峨口铁矿应用范例,总结了加装车辆辅助制动系统的方法与思路,通过设计雷达、电磁阀等辅助制动装置,研究车辆主动参与突发状况及复杂路况等行车信息预判,主动预警,提醒驾驶员采取必要的措施或主动控制车速以避免、减少行车事故发生,为实现车辆主动安全防护提供参考。
关键词:应用现状;制动;预警;主动安全防护
中图分类号:U491.6+2 文献标识码:A 文章编号:1674-957X(2021)06-0012-02
0 引言
峨口铁矿在用21台通勤客车,主要以2013-2015年生产的宇通客车、厦门金旅客车为主,当时出厂设计都没有配备主动防御、辅助驾驶功能。为了降低车辆事故隐患,有效避免交通事故的发生,提高通勤车辆本质化安全管理水平,确保通勤客车交通运行安全,同时吸取公司内部及兄弟单位的几起通勤客车侧翻、碰撞、盲区伤人事故教训,集团公司对通勤客车的管理提升安全等级,从驾驶人员管理到车辆硬件设施的升级做了大量工作,车辆辅助紧急制动系统开始在峨口铁矿通勤客车上安装试用。
1 车辆辅助紧急系统工作原理
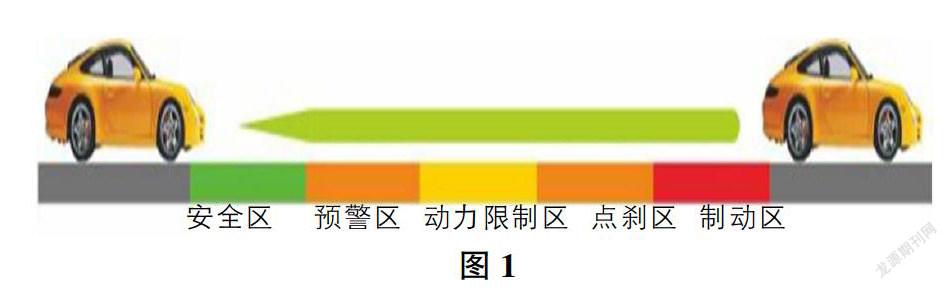
车辆行驶过程中,激光雷达障碍物检测功能开启,激光雷达不断监测判断与前方障碍物的距离,并根据本车车速、相对车速、车间距离等数据建立的数学模型,计算本车是否处于安全行驶状态,若车间距小于设定的安全距离,系统就会通过声(光)报警、限制动力输出、点刹制动或紧急制动来提醒驾驶员采取必要的措施或主动控制车速以避免追尾等行车事故的发生,实现主动安全防护。
2 车辆辅助紧急制动系统工作特性
①自适应制动控制算法:系统会不断根据前一刻的刹车数据调整下一次的刹车策略,通过对刹车力度的不断调整,对不同的路面状況、不同车辆都能达到相同的制动效果。
②精准数学模型:集光学、电子学、电动力学、机械力学为一体的实用精准数学模型,可以自动计算车辆安全距离,能在3-120km/h的时速范围内及时有效的实施紧急制动功能。
③故障导向安全设计:系统能自动检测所有主要元器件工作状态,如果元器件出现损坏、失效等状况都会使系统立即退出控制状态(含系统断电),不影响司机正常驾驶操作。
④高精度激光雷达:采用高精度激光雷达监测距离远,静态测距可以准确监测前方260m范围,同时具有极强抗干扰能力,能在轻度扬尘、雨天、雾天环境下正常工作。
3 车辆辅助紧急制动系统构成
主要部件:预警主机,主、副激光雷达,汇接控制器,电磁阀、倒车雷达处理器,超声波雷达,转速传感器、巡航模块及线束管路等。
4 主要部件安装及注意事项
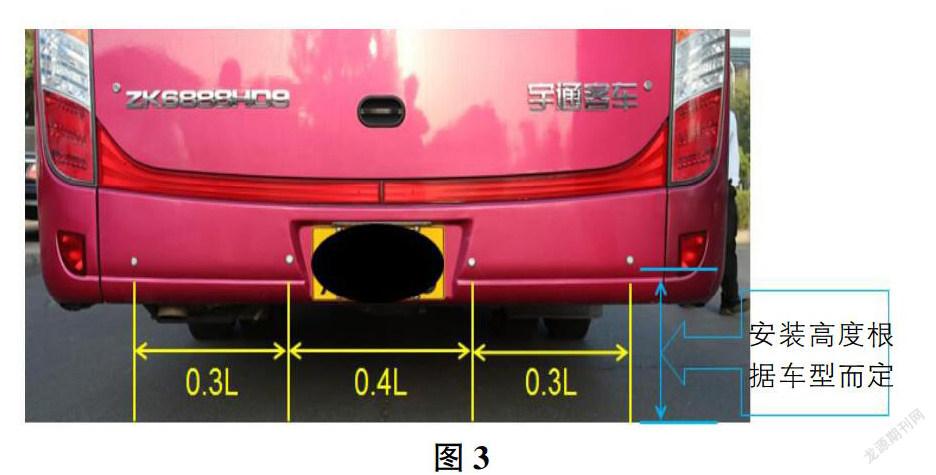
①激光雷达安装:主激光雷达需水平位于地面上方50-105cm(车中心),安装在保险杠上方或中网上,根据间隙大小选择“L”型支架或隔板平面支撑进行固定安装。副激光雷达安装高度在距地面40-105cm之间,距离主雷达20-60cm范围内,两个副雷达必须在同一水平线上(尽可能靠近车身两侧,副雷达安装可以与主雷达不在同一水平线上)。雷达安装后镜头不允许破损、进水抖动及其他力学干扰现象(如与车前杠、水箱、冷凝器等部件接触或受力)。
②电磁阀安装。
注意:电磁阀在安装时前后阀不能安装反,同时电磁阀本身也有方向;阀体有台阶的一面朝上安装,用电磁阀支架来进行固定,若其他面朝上则可能会造成阀体排气不及时或进气不均匀的现象;电磁阀安装位置距离原车快放阀、继动阀距离不能超过1m。
安装后要检查电磁阀固定支架螺丝是否牢固,气管走向是否与活动部件有摩擦;连接管路有无磨损,接口是否有松动漏气现象;线束及接口是否有松动、脱落、老化、进水、变形、腐蚀等情况。
③压力开关安装。
每个电磁阀上都有一个压力开关,压力开关的作用就是在系统自动刹车的时候点亮刹车灯。压力开关有两种接法,一是可以接在制动继电器上,二是可以接在原车刹车压力开关上。
④倒车雷达安装及倒车控制器位置安放。
倒车雷达的安装主要在于雷达处理器的防水处理,同时与汇接控制器之间的连接线也要做好防水防燃处理,线束布置要避开高温、活动物件固定。
根据车辆后保险杠实际情况,选择安装4个或其他数量超声波倒车雷达,加装超声波雷达要按照A、B、C、D的顺序从左到右安装,不能随意加装。若原车安装有4个超声波雷达的,可加装3个,后加装的雷达在等距离的情况下尽量远离原车雷达,避免互相干扰。
⑤电路信号采集。系统在行驶过程中需要通过采集刹车、转向、倒车、车速等信号掌握本车的行驶状态,信号线的接线可以在仪表盘后方、行车记录仪后方、后尾灯线路找到对应线束。
⑥车速信号采集:车速信号采集可以通过仪表盘线束或者原车总线束找到对应线束。
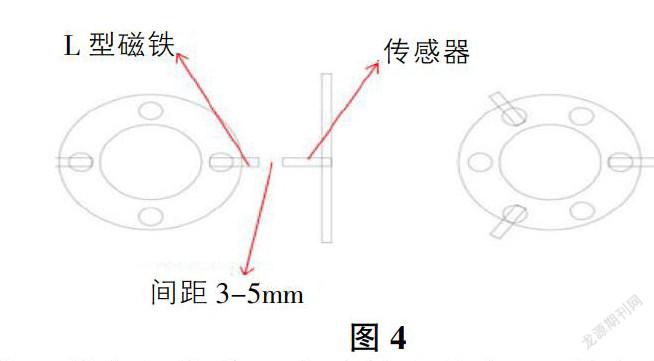
⑦车速传感器安装。外加车速传感器的安装位置,选在传动轴上的传动螺丝结合位置,根据传动螺丝数量均匀对称固定L型磁铁,车速传感器在支架孔内安装,传感器距离磁铁距离控制在3-5mm。
⑧预警主机安装及线路管路连接。预警主机选择在仪表台闲置点司机方便观察的地方安装,连接电源、线路、管路等。
5 车辆辅助紧急系统调试
所有部件安装连接完毕后,开始进行系统静态调试、设备及系统自检、系统初始化、系统学习等调试步骤。系统静态调试主要是根据不同车型调整主、副激光雷达方向(上下、左右)位置。系统初始化操作方法及注意事项:在车辆熄火断电的情况下连接巡航模块通讯线然后踩着刹车开机,开机后再启动车辆,保持刹车10秒钟后在松开刹车,系统自动初始化完成。注意在初始化过程中严禁踩油门,否则会导致初始化失败。系统学习的目的是学习适应车辆速度,将本车车速存储于系统内,并对学习后的速度进行检验,检验标准是将汽车加速至60±3km/h时高速模式指示灯闪烁即表示速度正确。
6 关键数据录入
针对矿区复杂路面状况,对关键路段、弯道、隧道的相关参考数据录入系统设定预警标准。主要参数包括道路限速速度、岔路口、弯道半径、路挡高度、隧道寬度长度等数据。
7 动态测试
调试及关键数据录入完成后进行系统动态测试,系统动态测试分低速动态测试、高速动态测试、倒车测试。
①低速动态测试要点:为确保测试安全进行,在选择被测试的车辆时尽量不选择黑色车辆或货车;严禁对静止的车辆(如正在等红绿灯的车辆、路边停放的车辆)做防碰撞测试;测试时严禁急加速冲向前车;测试时车速控制在30-50km/h之间;测试时需先预估出目标车的车速,然后在目标车的正后方慢慢跟近,在系统自动制动时驾驶员松开油门踏板并且做好随时人工制动的准备;如在跟车过程中发现主机显示距离与实际距离不相符或显示距离不稳定(时有时无)时停止测试。
②高速动态测试要点:上路以后不要立即测试,先观察好路况,再确认系统是否处于高速模式工作状态(预警主机右侧高速模式指示灯亮即表示工作在高速模式);行驶过程中车速控制在70km/h到110km/h之间;测试中要保持测试车的速度略高于目标车(高于目标车10km/h左右)为最佳,系统报警后平稳跟近目标车辆,不允许猛踩油门加速冲向前车;不得频繁进行防碰撞测试,测试时间间隔应控制在10分钟以上可以进行下次的测试。
不论是高速测试还是低速测试都要严格遵守交通安全规则,在不具备安全测试的条件下不得强行测试。
③倒车防撞测试:倒车时系统限速在10km/h以下,在倒车过程中检测到后方有障碍物时,系统会在距障碍物约20-50cm 处实施制动停车。禁止用人站在车辆尾部做测试,禁止测试人员下车做无人驾驶倒车测试。
8 培训试用
测试成功后对司机进行系统工作原理、维护操作注意事项、紧急情况下的应急处置、极端气候环境的停机操作等进行培训,演练合格后投入使用。
9 结束语
通过在峨口铁矿及兄弟单位通勤客车上安装使用,实现了通勤客车主动防碰撞系统软件、硬件升级,使车辆主动参与紧急制动成为可能。车辆辅助紧急制动系统能够实现在紧急情况下(驾驶人疲劳、疏忽、注意力不集中、驾驶员经验少、突发急病等未能采取有效措施时)主动预警及车辆主动安全防撞功能,降低了行车事故,确保矿区通勤客车安全运行。同时也为在用未设计配备主动防御、辅助驾驶功能的客车、货车实现车辆主动安全防护提供参考。
参考文献:
[1]周志军,陆春伶,周良杰.紧急制动系统分层控制策略研究[J].时代汽车,2020(08):147-149.
[2]冯瑶.商用半挂汽车列车预测性紧急制动系统研究[D].吉林大学,2018.
[3]谢学飞.基于辅助制动的纯电动商用汽车复合制动系统控制策略研究[D].长安大学,2016.
猜你喜欢
意林原创版(2021年7期)2021-08-03
经济数学(2020年4期)2020-01-15
环球时报(2017-01-19)2017-01-19
艺术科技(2016年9期)2016-11-18
电脑知识与技术(2016年25期)2016-11-16
企业技术开发·中旬刊(2016年10期)2016-11-12
财会学习(2016年19期)2016-11-10
成才之路(2016年26期)2016-10-08
科技与企业(2015年18期)2015-10-21
中国海关(2009年8期)2009-09-17