基于HSV的多源遥感数据协同变色松树识别研究
2021-09-10 01:37:32夏进亮周火生陈勇明
热带地貌 2021年1期
李 琴,夏进亮,余 榕,周火生,陈勇明
(广东省国土资源测绘院,广州510500)
遭遇病虫害的松树在颜色上与健康松树会有所区别,呈枯死状(以下称其为“变色松树”)[1]。造成我国松树枯死的主要致病因子主要是松材线虫,健康松树感染松材线虫后,40 天左右就会出现症状,从发病到死亡只需2—3 个月的时间,从单株发病到整片松林毁灭只需3—5年[2],具有致死快、蔓延迅速、适生性广、防治难等特点,有“松树癌症”之称,是森林生态系统中最具有危险性、毁灭性的病害之一[3]。30 多年来,全国因松材线虫病损失的松树累计达十亿株,导致直接经济损失和生态服务价值损失上千亿元。根据2020年国家林业和草原局公布数据,截止2020年底,全国共有726个县级发生区,发生面积2 714 万亩。而广东省已有52 个县区,林业覆盖率较高的县区几乎都被感染。
变色松树的识别发现是松材线虫病疫情防控工作的基础,现有变色松树的监测手段主要有卫星遥感监 测[4-8]、无人机 遥 感监测[9-15]、地 面调查[16]3 种方式。各方式均具有一定的局限性,多源遥感数据的协同使用可大幅提高变色松树识别的精度,关于多源遥感数据协同识别变色松树的现有研究较少[17]。现有很多应用于变色松树提取的遥感分类算法,如深度学习、支持向量机、面向对象、神经网络等[15,18]。虽然这些算法在一定程度上可以提高人工目视解译的效率,但就时间复杂度而言难以满足GB甚至TB数量级的超高空间分辨率无人机影像计算需求。陶欢[15]等人提出了一种适合超高分辨率、大数据量的无人机影像高效处理方法,即基于HSV 阈值法的无人机影像变色松树识别方法,得到的变色松树识别总体精度为58%—65%,高于RGB 阈值法。因此,本文以广东省河源市龙川县老隆镇板塘村为研究区域,基于无人机超高分辨率遥感影像、WorldView-2 卫星影像、机载激光雷达数据等多源遥感数据,采用HSV(色调-饱和度-明度)色彩变换法将无人机影像从RGB 色彩空间转换为HSV 色彩空间,以分离色调(Hue)和明度值(Value),分析变色松树与其他地物在“H-V 空间”的差异,构建变色松树HSV阈值提取规则,结合WorldView-2卫星影像、机载激光雷达数据、地面调查数据、林业小班、松树冠层图形几何特征,实现快速准确的变色松树识别,并通过目视解译与实地验证方法比对不同色彩空间、不同分辨率影像提取结果,总结并提出基于多源遥感数据协同变色松树识别研究的技术思路和方法,为广东省林业局快速识别定位变色松树提供技术支撑。
1 研究区概况
根据广东省2020年春季松材线虫病疫情普查情况,龙川县老隆镇有较多染病小班,因此结合影像分析与实地调查选择板塘村为研究区域。研究区域位于广东省河源市龙川县老隆镇板塘村北部区域,面积为0.5 km2。该区域年平均气温19 ℃—24 ℃,地形主要为丘陵,植被覆盖稀疏。种植树种基本是马尾松,阔叶树较少且分布分散,有较多的杂草及裸地。变色松树主要位于山坡边缘位置,主要可分为针叶变色松针未脱落与针叶变色松针已脱落(陈年枯死树)2 类,死亡时间较长。
2 研究方法及数据
2.1 HSV颜色模型
HSV(Hue,Saturation,Value)是根据颜色的直观特性由A.R.Smith 在1978年创建的一种颜色空间,也称六角锥体模型(Hexcone Model)[19]。H 表示色调,S 表示饱和度,V 表示明度。RGB 颜色模型是面向硬件的,而HSV 是面向用户的,HSV 颜色模型由RGB 模型转化而来。HSV 对于用户来说是一种很直观的颜色模型,在计算机视觉、遥感图像处理识别等领域相对RGB 颜色模型具有独特优势,比RGB 颜色图像更适合用于影像分析[20],HSV 三要素的变化对应着地面植被的变化,不同的地物(如裸土、植被、水体等),它们之间的S值或V值有可能相等,但H值总是存在差异[15]。
2.2 数据获取
在无人机影像及激光雷达数据获取前,先用林业小班数据以及WorldView-2 卫星影像对板塘村松树分布及疑似变色松树集中情况进行分析,再结合实地调查选取适宜的飞行作业区。各数据获取情况详见表1。

表1 研究数据一览表
2.3 数据处理
研究区域变色松树大多是陈年枯死松树,枯死约在1年左右。因此通过对2018年2月WorldView-2 卫星影像进行归一化植被指数(NDVI)计算,结合林业普查小班,采用NDVI 阈值法(NDVI≥0.4)提取变色前的健康松树分布范围。
对无人机拍摄相片进行拼接、纠正,形成超高分辨率的正射影像。对正射影像进行重采样(重采样分辨率为0.1 m)与HSV色彩变换。
对激光雷达点云数据进行融合、类别重置、去噪、地面点识别、植被分类、几何纠正。依据地面调查,研究区域的松树高度均在2.0 m 以上。因此,对高度大于2.0 m 的植被进行单木树冠分割,从单木分割处理的点云中提取单株树木位置(X、Y、Z)、高度、冠幅直径和冠幅面积等信息。
3 实验与分析
3.1 变色松树识别阈值方程构建
如图1,变色松树在H-V 空间上有明显的聚集现象,变色松针未脱落和变色松针已脱落无明显差异,与其他地物容易区分。但与已有研究结果[15]不同,本研究的变色松树聚集区包括2 个分区,分别由直线①②③④(第一分区)与⑤⑥⑦(第二分区)构成,第一分区H≤30、V>0.5,第二分区H>=330、V>0.45。H-V 空间散点图中a、d 区域的变色松树用HSV 阈值法识别可得到较高精度,而b 区域变色松树与裸地和道路较难区分,c 区域变色松树与枯死草地难以区分,e 区域变色松树与阴影、枯死草地难以区分,这些区域通过本文方法可以提高识别精度。变色松树在R-G 空间散点图上特征与其他学者研究结果相同,变色松树与其他地物也相对较易区分,但R 与G 相关性较强,未呈现聚集特征,而呈条带状分布。基于HSV 与RGB 颜色模型的阈值线性方程如表2。
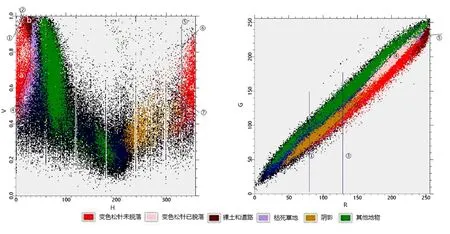
图1 H-V(左)和R-G空间图(右)

表2 HSV与RGB变色松树识别阈值方程
3.2 基于激光点云的单木分析
研究区域内提取松树6 147 棵,树高在2.4—30.6 m 之间,平均高度8.4 m,3.42—4.42 m 高度范围的树最多,10.42 m 以下的占70%,15.42 m 以下的占90.26%;各单木冠层面积差异较小,分布较为平均,平均冠层面积为13.14 m2,最小冠层面积为0.53 m2,最大冠层面积31.53 m2,该指标可以辅助剔除碎小图斑和较大图斑;冠幅直径在1.0—6.5 m 之间,平均直径5.0 m,该指标可剔除直径过大的图斑。
3.3 变色松树识别与精度评价
本文首先是通过上述构建的阈值方程分别基于HSV 与RGB 不同色彩空间图像进行变色松树的初提取;其次采用基于多光谱卫星遥感影像提取的松树范围进行松树范围外干扰结果的剔除;再次根据激光点云提取的冠层面积、冠层直径剔除小阴影、连片阴影、裸地、枯死草地等的干扰,另外根据提取结果的数学几何特征,剔除与单木冠层形状相差较大的结果;最后采用基于激光点云数据提取的单木分布剔除非松树的识别结果。通过以上结果的处理,可最大限度剔除非纯林地区裸地和道路、枯死草地、阴影等地物对变色松树识别造成的干扰,提高非纯林地区变色松树识别精度。
如图2,基于HSV 图像识别精度比RGB 高,RGB 图像存在较多错分漏分的情况,将很多偏黄植被误识别为变色松树,而很多变色松树并未正确提取。HSV 图像主要是将枯草、红色阔叶树与变色松树错分,漏分大多数为变色松针已脱落的松树,采用分辨率为0.1 m 的影像就能精准提取单株变色松树,与更高分辨率识别结果基本无差异。

图2 变色松树识别结果
通过目视解译及野外实地验证结果(如表3),基于HSV 图像提取变色松树的识别精度大幅高于RGB 图像,错分率和漏分率远远低于RGB 图像,且与已有研究相比,本研究错分率得到大幅降低,约从60%降低至20%。

表3 不同色彩空间图像变色松树识别精度评价
4 结论
研究表明多光谱卫星影像、激光雷达点云等多源遥感数据与图形几何特征的协同利用可较大限度剔除枯死草地、阴影、裸地和道路的影响,基于HSV 颜色模型提取精度优于RGB 图像,且0.1 m 高分辨率影像与0.04 m 超高分辨率影像识别结果差异较小。因此,在今后基于无人机高分辨率影像的变色松树识别应用中,获取数据分辨率为0.1 m 即可满足精准定位到单株变色松树的需求,为基于无人机高分辨率影像数据获取提供了方向。此外,目前国内研究中还未发现从冠层图形几何特征,以及将激光点云与超高分辨率影像融合应用于变色松树识别的研究,本文为基于遥感数据快速高效精准识别变色松树开辟了一条新的技术思路和手段。
虽然,通过冠层图形几何特征以及激光雷达点云数据能较大限度剔除枯死草地、阴影、裸地和道路的影响,但识别结果还是存在一定的误差。一是由于激光雷达点云数据空间坐标为树株的绝对位置,而无人机超高分辨率影像非真正射影像,两者提取树冠位置存在一定的偏差,尽管本文通过无人机飞行高度、照片重叠率、照片大小、树高等参数计算了偏差范围值,但仍然存在误差;二是激光雷达点云提取树冠结果本身也存在一定的误差,导致识别到的变色松树有被误剔除的情况。今后的研究重点将会在上述两方面进行深入,希望变色松树识别的精度能有一定程度的提升。
猜你喜欢
中国农业信息(2022年1期)2022-05-25 13:31:46
农业机械学报(2021年11期)2021-12-07 05:36:44
大气科学(2021年1期)2021-04-16 07:34:18
雷达学报(2020年3期)2020-07-13 02:27:16
小学生必读(低年级版)(2019年12期)2019-04-20 08:39:22
童话世界(2018年23期)2018-08-23 09:13:16
小学阅读指南·低年级版(2017年7期)2017-08-04 04:23:38
农业环境科学学报(2017年2期)2017-03-20 14:57:37
太空探索(2015年8期)2015-07-18 11:04:44
浙江大学学报(工学版)(2015年1期)2015-03-01 01:17:19