基于三维扫描点云数据的模型桥形变获取
2021-09-09 06:27:26周志祥
实验室研究与探索 2021年8期
冯 麟, 周志祥, 唐 亮, 张 鑫, 于 辉
(1.重庆交通大学土木工程学院,重庆400074;2.山区桥梁及隧道工程国家重点实验,重庆400074;3.深圳大学土木与交通工程学院,广东深圳518060)
0 引 言
作为结构健康检测的重要参数,荷载作用下桥梁的形变与其结构的安全运营状态具有重要的联系,因此对桥梁结构进行有效的形变检测可为其几何形态变化及动、静态响应的安全预警提供关键的量化指标[1-2]。目前的桥梁检测手段大多具有成本高、主观性强、机动性差及影响交通状况等缺点[3],特别是针对如斜拉桥与悬索桥等跨江大桥而言,使用传统的接触式位移传感器进行测量时难度较大且精度难以控制[4],进而影响检查效果与健康状况评定,最终导致结构功能不断退化而“带病”运营,从而为结构的安全运营埋下隐患[5]。
随着三维激光扫描仪精度与三维重建技术的提高,通过利用其获取的结构点云数据进行三维重建,最终得到结构相关形态数据的研究方法已得到广泛应用[6]。孙杰等[7]以具体楼房为研究对象,在获取多期点云数据后进行曲面重构并建立NURBS模型,最终得到目标对象的形变值与倾斜值;黄帆等[8]利用针对隧道断面的扫描点云数据进行隧道整体形变的测量,结果显示其检测值与实测值拟合程度大于90%;司梦元等[9]利用道路路面的三维点云数据建立了对应的数字化模型,进而获取了研究对象的整体形变值,最终建立基于三维激光扫描技术的路面测量方法;姚习红等[10]结合三维激光扫描技术与BIM技术对一高层建筑的钢结构进行了形变监测。相对于传统的接触式桥梁形变检测方法,基于三维激光扫描的结构形变检测方法[11-12]可对目标桥梁进行局部或整体的实时非接触式点云数据获取,同时无需预埋相关检测设备;在计算与存储方面[13],无拓扑结构的点云数据模型能显著降低算法复杂度以提高算法运算速率;将该方法运用于桥面结构的点云数据获取[14-15],可实现荷载/环境作用下桥面下挠与凸起的精确化三维空间信息数据检测,从而实现桥面数据的自动记录、处理及对比。
为研究依据三维点云数据获取荷载作用下桥面挠度的测量方法,设计了一座有机玻璃简支T型宽桥,进行基于三维激光扫描技术的桥面形变测量试验,同时进行不同荷载及结构损伤的影响因素研究,最后将测量值与实际值进行对比分析以验证该方法的测量可行性。
1 模型桥实验
1.1 设计与构造
本试验模型桥材质主要选取力学形态表现为硬而脆、断面平滑的刚性硬质材料——有机玻璃,该材质的拉压强度大致为50~77 MPa,弯曲强度约为90~130 MPa,密度为1.18 g/cm3;同时其断裂伸长率约为2%~3%,因此较小的荷载作用便可能会使原有裂缝扩展。由于有机玻璃的透光率较高且考虑光的折射影响,为此须在模型桥表面铺上一层反射率高的材料,最终选择覆盖白色贴纸在试验桥表面以反射三维激光扫描系统发出的红色激光,具体如图1所示。

图1 覆盖白色贴纸的有机玻璃模型桥
为使荷载作用下模型桥的形变量明显且易于测量,将有机玻璃试验桥的结构形式设计为受力明确的简支T型宽桥,其宽长比为0.5,纵向桥长160 cm,同时分别在跨中、纵向1/4与3/4位置以及两端支座处设置横隔梁;横向桥宽80 cm,T型主梁布置5片;其具体尺寸及构造见图2、3。

图2 模型桥平面图(mm)
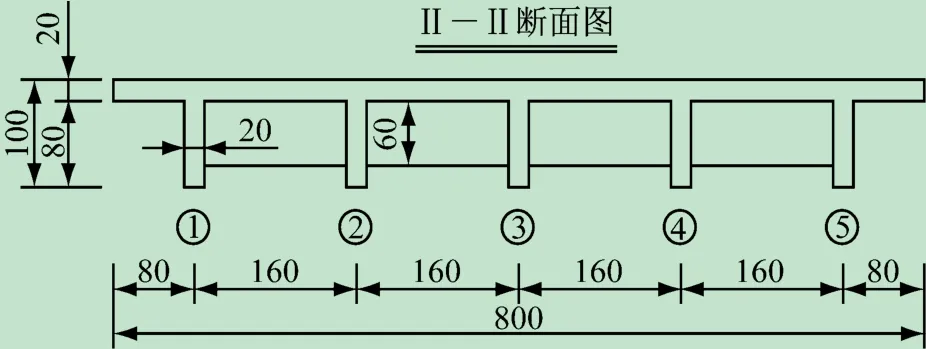
图3 模型桥横断面图(mm)
1.2 约束与加载
由于模型试验桥的构造为简支T型梁桥,因此5片T梁肋板底两端边界条件分别为固定端支座与铰支座,从而保证铰支座位置处的横向位移与转动位移,在保证固定端支座处转动位移的同时约束其纵横向位移,其具体支座形式如图4、5所示。

图4 铰支端支座
试验加载方案主要为偏心加载以使桥面形变明显,加载中心位置横向离模型桥边缘10 cm,同时为减少加载结构物对桥面三维点云数据的遮挡,最终选择利用杠杆原理进行间接偏心加载,其加载示意见图6。杠杆设计的具体形式为一端通过轴承串接支撑杆固定于地面,桥面加载位置处叠放秤砣作为支点,通过杠杆另一端秤砣个数改变荷载等级,其实际加载形式见图7;同时一级荷载大小为14 kg,二级荷载大小为42 kg。

图6 模型桥加载示意图(mm)

图7 模型桥试验加载图

图5 固定端支座
为测试三维激光扫描对于桥面形变测量的敏感性,试验选择在完成无损试验桥加载形变量测后设置预损伤并重复进行试验,以分析结构损伤对于形变测量影响;其预损伤位置在边缘T梁肋板,主要形式为人为裂缝,裂缝宽度为0.6 mm,长度为80 mm,其裂缝具体位置示意见图8。

图8 模型桥人为裂缝图
1.3 数据采集
试验选用徕卡Nova Ms50获取不同荷载作用下模型桥的桥面点云数据,进行结构无损及有损状态下的形变测量;该扫描设备最高精度为0.8 mm,在抗干扰性以及数据储存方面具有较大优势。
试验时激光发射源须高于模型桥面以保证扫描视场包含整个桥面并获得理想扫描点云数据,扫描前设置扫描点云密度为2 mm,扫描框选范围主要为试验桥桥面。实验过程中依次获取无损状态下空载、无损状态下多级荷载、有损状态下空载以及有损状态下多级荷载的点云数据,其扫描过程耗时均在10 min内,图9即为基于Nova Ms50三维激光扫描系统所获取的有机玻璃模型桥桥面点云数据。

图9 有机玻璃模型桥桥面点云数据
2 点云数据去噪处理及程序设计
由桥面点云数据采集结果可知,实际测量过程中激光扫描仪采集的数据会受到来自人为、设备以及环境因素的影响,进而形成不同程度的噪声及多余数据点,影响后续数据的分析及模型重构,因此须对点云数据进行滤波处理以去除噪声。
2.1 K近邻自适应双边滤波算法
由三维激光扫描仪采集所得点云数据为

当采用K近邻自适应双边滤波算法对采集空间内的噪声及冗余数据点去噪处理后得新模型点云数据为

式中:f ( x,y,z)为初始采集点云数据;f′( x,y,z)为去噪处理后点云数据;n为平面法向量。
自适应双边滤波因子α计算如下:

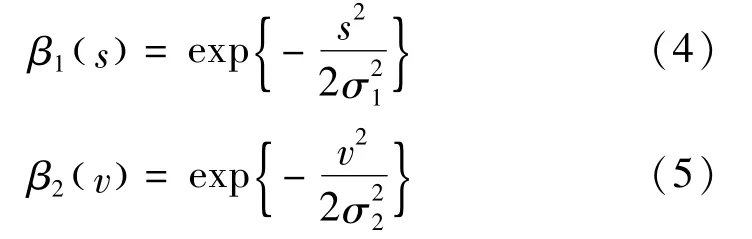
σ1为fi与邻域间距离对fi的作用因子,即选取邻域点数;σ2为fi与邻域间距离向量在法向量n投影对fi的作用因子,即点云模型特征保持效果。
在实际滤波去噪中,σ1一般取值邻域半径,σ2一般取值领域点标准偏差。即:


2.2 程序设计
由三维点云数据去噪算法可知,利用三维激光扫描仪获取结构对象的桥面三维点云数据后,首先应搜索目标点云K近邻域内所有点并求出空间域高斯函数变量s与频率域高斯函数变量v,进而结合邻域半径σ1与领域点标准偏差σ2计算出自适应双边滤波因子α,最后进行法向移动并得到去噪后新模型点云数据(见图10)。
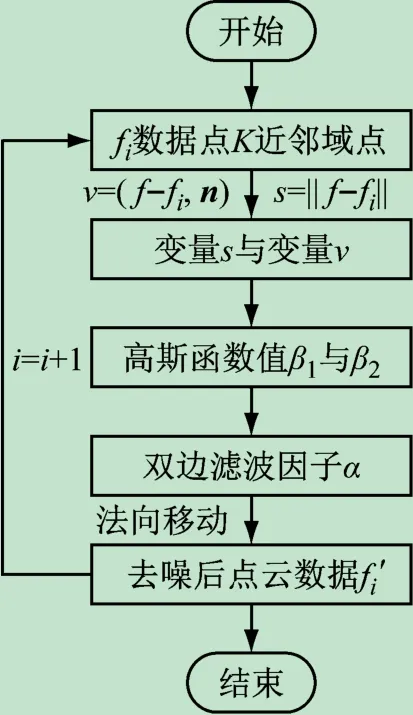
图10 点云数据滤波程序流程图
3 结果分析
利用基于K近邻自适应双边滤波算法所编写的程序,对有机玻璃模型桥原始点云数据模型(点云数为155 970)进行去噪处理后得到新点云数据模型(点云数为92 392),如图11所示。

图11 滤波去噪后点云数据图
获取经过降噪处理的点云数据后对点云模型进行平滑效果处理,在避免过度平滑后结合Geomagic Qualify中的3D比较功能进行损伤/荷载工况桥面与无载无损工况桥面叠差,从而获取不同荷载与损伤工况下的桥面竖向形变数据;图12与13即为无损及有损工况下1级与2级荷载作用下的挠度云图。
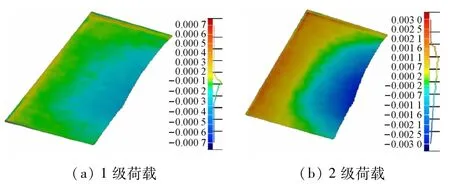
图12 无损工况下不同荷载桥面挠度云图(m)
分析无损与有损工况下桥面挠度云图可知,桥面最大挠度位置处即为荷载加载位置,且加载侧的下挠度与对应侧的上挠度与实际形变分布相同;随着荷载等级的增加,加载位置下挠度随之增加,对应侧上挠度加大;同时,相同荷载下作用下有损伤工况桥面形变量大于无损伤工况,表明依据点云数据获得的桥面挠度能定性体现不同荷载作用下不同损伤工况对应的挠度变化。
分析图12与表1可知,无损工况下依据三维扫描点云数据所获取的处于一级和二级荷载作用下模型桥桥面最大形变值分别为0.7与3.0 mm,同时对应百分表实测值分别为0.8与3.2 mm,最大误差率为12.5%;分析图13与表1可知,有损工况下最大形变值分别为2.6与7.4 mm左右,对应百分表实测值分别为3.0与8.3 mm,最大误差率为13.3%。综上可知,基于点云数据所测量的挠度值与传统百分表实测值较符合,表明可利用三维激光技术获取桥面点云数据,在对原始进行滤波降噪后结合Geomagic Qualify中的3D比较功能获取荷载作用下目标桥面的形变值。

图13 有损工况下不同荷载桥面挠度云图(m)
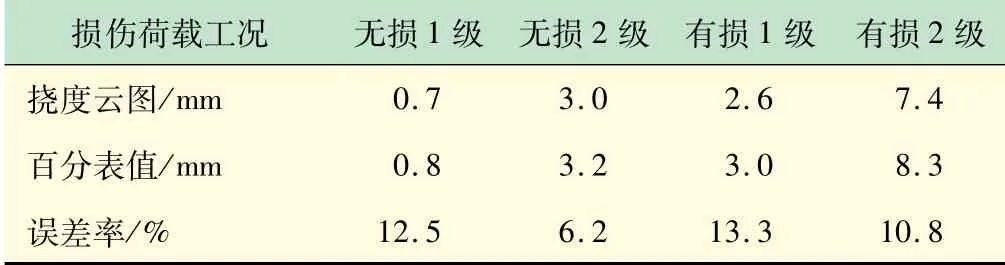
表1 三维点云挠度与实测挠度对比
4 结 论
本文针对一座有机玻璃模型桥依次开展了无损及有损工况下不同等级荷载的试验,通过利用桥面点云数据获取了试验桥不同荷载作用下的挠度云图,结论如下:
(1)利用三维激光扫描技术获取桥面原始点云数据后,结合相关滤波去噪算法与Geomagic Qualify中的3D叠差功能可实现不同工况下目标桥面的形变测量,相较于传统的点式位移计测量方法,该方法原则上可实现“面”上所有点的位移测量;
(2)通过分析加载侧与对应侧挠度在不同工况作用下的变化规律,表明通过三维激光扫描技术获取的桥梁形变数据可表征多种荷载工况下结构的挠度变化;
(3)对比基于三维激光扫描点云数据测量挠度云图与传统百分表实测最大值发现,本文方法测量最大误差率为13.3%,表明可基于三维激光扫描技术实现对桥梁结构的形变数据采集,从而为桥梁的经常性形变检测提供一种新途径。
猜你喜欢
World Journal of Clinical Cases(2020年16期)2020-09-16 13:35:08
江西建材(2018年1期)2018-04-04 05:26:16
上海公路(2018年3期)2018-03-21 05:55:50
中国公路(2017年15期)2017-10-16 01:31:57
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18
吉林地质(2014年4期)2014-03-11 16:47:56
电子设计工程(2014年20期)2014-02-27 12:01:00
城市道桥与防洪(2014年4期)2014-02-27 07:25:51
城市道桥与防洪(2013年12期)2013-03-11 15:19:49