
一种应用于港口起重机的无现场控制点测量系统
2021-09-09 08:08邝湘宁邱法聚胡群威仇佳捷丁高耀
起重运输机械 2021年15期
邝湘宁 邱法聚 胡群威 仇佳捷 丁高耀
宁波市特种设备检验研究院 宁波 315000
0 引言
随着我国经济和海内外贸易的快速发展,港口物流货物量呈现高速上行趋势,对港口起重机的要求也越来越高,其安全性评估问题逐渐成为影响港口设备能否长期稳定运行的关键问题。针对港口起重机日益突出的安全性问题,港口起重机相关尺寸监测数据可直观地反映出起重机的结构尺寸变化和运行情况,为起重机安全性评估理论的探究提供真实准确地数据来源,故港口起重机相关尺寸数据的测量是一项很重要的工作[1]。
目前,港口起重机结构相关尺寸测量监测的方法主要包括布设传感器、全站仪测量等。对于布设传感器来监测港口起重机尺寸变化的方法,可得到直观、准确地测量结果,但传感器对于布设技术和位置的要求比较高。港口起重机结构庞大,攀爬不便,人工设置传感器不仅效率低,而且容易产生安全问题。港口环境恶劣,传感器暴露在外,易发生损坏,难以长时间稳定工作。全站仪测量所需要的设备比较复杂,对于操作人员的技术和现场环境有较高要求,且测量范围易受到港口环境的限制,很难满足对起重机结构进行高效准确的测量要求。
经过多年发展,无接触式摄影测量技术已广泛应用到各个工程领域。在港口起重机尺寸测量方面,传统的近景摄影测量方法目前存在需要人工设置控制点的难题,不仅效率低,且存在安全隐患。若使用起重机结构自身特征点作为控制点,会因难以重新定位关键点而产生相平面的识别误差,从而影响整个测量系统的精度。此外,传统摄影测量方法还需要用到很多辅助测量设备,人工操作繁琐,且在恶劣港口环境中使用不便。针对以上不足,本文提出一种无控制点的摄影测量方法。
1 近景摄影测量
近景摄影测量是通过相片的影像坐标,利用前方交会原理来确定被测对象物方空间坐标的一种方法[7]。若要实现从像方坐标向物方坐标的转换,应获知相片的内外方位元素和同名像点的像方坐标。相片的内方位元素[x0y0f]是表征相机焦点相对于相片的位置参数,可通过相机的标定检验确定。相片的外方位元素[XYZφωκ]表征相片在物方坐标系统内的位置参数和姿态参数。同名像点的像方坐标和相片的内方位元素较易获得,但相片的外方位元素会随摄影位置的变化而变化,不易获得。传统的摄影测量方法需在被测目标上设置若干控制点才能实现对相片外方位元素的求解。
2 测量系统结构设计
如图1所示,该测量系统由2台前站相机、1套后站双目相机以及与之配套的室内标定场组成。前站相机共有2套,以实现对待测目标的双目视觉测量。前站相机上设置有辅助定位支架,支架上有若干易于辨识的特征点,即移站关键点。后站双目相机的相机支架可将2台相机平行地稳固布置于三脚架上,从而形成1套双目相对位置固定的双目视觉测量系统。标定场主要由若干支承柱组成的笼架以及安装在各支承柱上的标定块组成,目的在于建立一个标准的空间坐标系统。
该测量系统的整体构成如图1所示,首先将相机按照图1所示位置关系放置于标定场内,调整好位置后对场内的预设测量点进行拍摄。前站相机和后站相机均可根据其所摄相片和标定场内已知的测量点物方坐标,利用后方交会原理得到相机的外方位元素。由于后站双目相机所摄相片中包括前方相机,所以后站双目相机可利用前方交会原理得到前站相机定位辅助支架上移站关键点的物方坐标。在得到上述所需标定数据后即可脱离标定场,调整前方相机以合适距离、角度拍摄实际被测物体,通过后站双目相机重新测定各前站相机移站关键点的物方坐标,利用标定阶段得到的前站相机外方位元素与移站关键点之间的关系,实现前方相机外方位元素的迁移计算,从而实现无标定的远距离测量。

图1 测量系统整体示意图
3 算法实现
3.1 算法原理
根据摄影测量方法的基本原理,当前站相机与辅助定位支架上移站关键点的相对位置保持不变,且不共面的移站关键点的数量大于或等于4时,可以认为前站相机的外方位元素与这些移站关键点的坐标存在唯一确定的关系。本设计的核心就是利用前站相机外方位元素和移站关键点之间的关系,实现室内标定场与实际测量场景中前站相机的外方位元素的转换,这一方法被称为移站算法。
3.2 算法验证
如图2所示,设移站前1~4号移站关键点物方坐标分别为(XB1,YB1,ZB1)、(XB2,YB2,ZB2)、(XB3,YB3,ZB3)、(XB4,YB4,ZB4),与之对应的外方位元素为[X1Y1Z1φ1ω1κ1];移站之后,1~4号移站关键点的物方坐标为(XC1,YC1,ZC1)、(XC2,YC2,ZC2)、(XC3,YC3,ZC3)、(XC4,YC4,ZC4),此时的外方位元素为[X2Y2Z2φ2ω2κ2]。对外方位元素的求解可分为坐标求解和角元素求解。

图2 移站关键点示意图
1)坐标求解
设P为点系(XB1,YB1,ZB1)、(XB2,YB2,ZB2)、(XB3,YB3,ZB3)、(XB4,YB4,ZB4)组成的集合,Q为点系(XC1,YC1,ZC1)、(XC2,YC2,ZC2)、(XC3,YC3,ZC3)、(XC4,YC4,ZC4)组成的集合。坐标计算即计算P确定的坐标系向Q确定的坐标系转换的旋转矩阵R和平移矩阵S。求解矩阵R和S可采用数学SVD变换原理,本文不作赘述。最终坐标变换可简化为

2)角元素求解
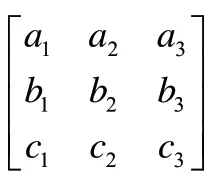
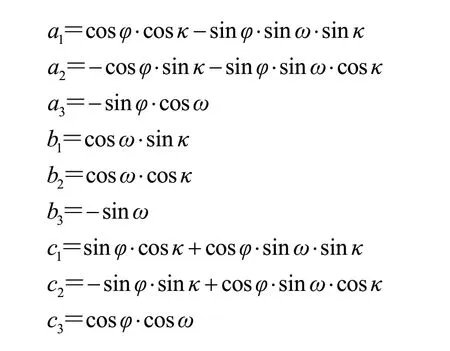
故有

4 实验
4.1 室内标定
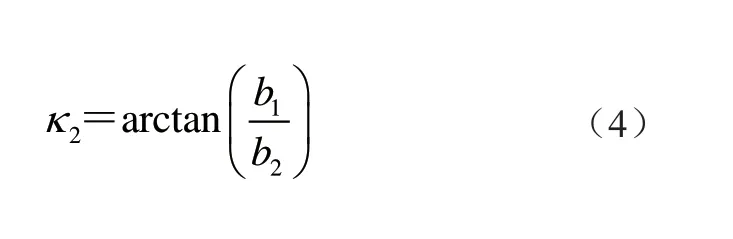
相机在室内标定场的参数标定作为本实验的第一阶段,标定场设置如图3所示。为保证相机标定结果的高精度,以3个坐标光笔测量仪为标定工具测量标定场相关点的坐标值。按照预设的方法调整前站相机和后站相机位置,完成拍摄后,利用后方交会原理分别解算前站相机和后站相机的外方位元素,取3次实验的平均结果作为最终的标定结果。相机的外方位元素标定数据如表1、表2所示。

图3 室内标定场
表1 前站相机标定阶段外方位元素
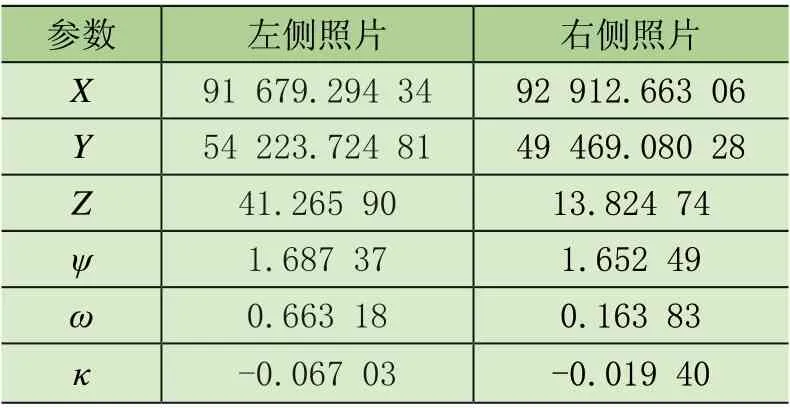
表2 后站相机标定阶段外方位元素
在已知后站相机的外方位元素后,利用前方交会解算出前站相机上4个移站关键点的坐标,以便对前站相机的外方位元素进行迁移计算。
4.2 室外测量
室外实际测量是本实验的第二阶段,实验对象为1台额定起重量41 t的门式起重机,起重机上的预设测量点选择如图4所示。

图4 起重机实验测量点
在后站相机外方位元素不变的情况下,根据后站相机所摄的前站相机相片可直接解算前站相机上移站关键点的坐标,然后根据移站算法得出在此测量场景中前站相机的外方位元素(见表3)。
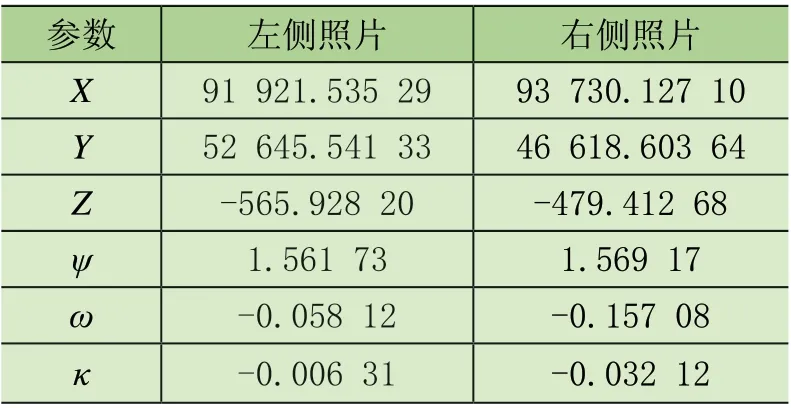
表3 前站相机测量阶段外方位元素
在获得前站相机的外方位元素后,利用前站相机所摄的起重机相片,解算起重机上各预设测量点的坐标,所得结果见表4。
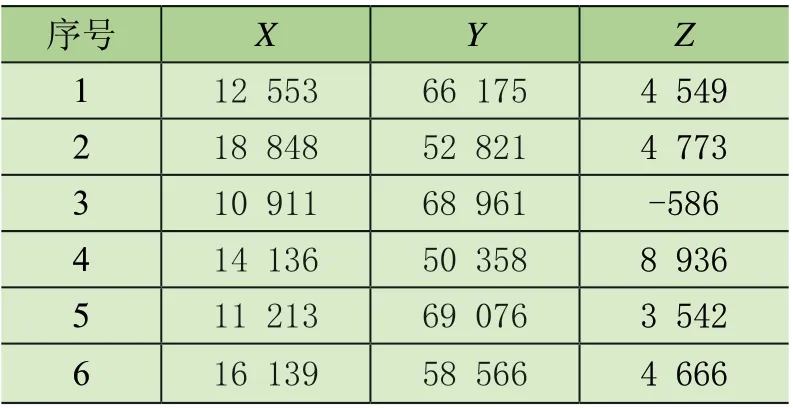
表4 起重机测量点解算坐标 mm
为了验证测量结果的正确性与精确性,本实验采用全站仪对上述测量点进行了测量,测量结果如表5所示。
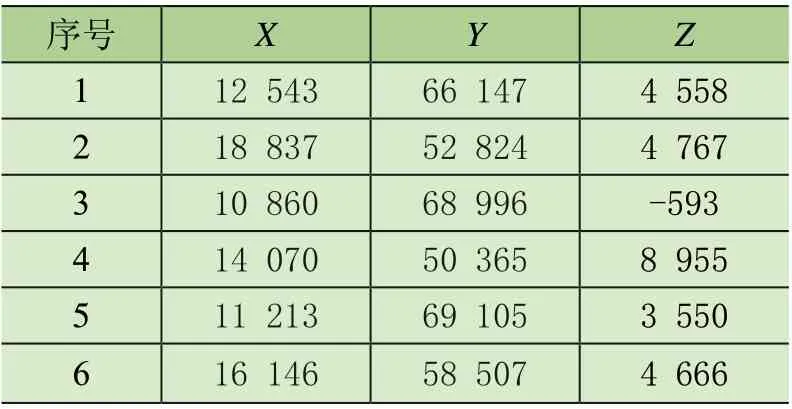
表5 起重机测量点全站仪测量坐标 mm
4.3 实验结果与分析
在完成上述实验数据的测定后,将摄影测量方法获得的解算坐标与全站仪直接测得的测量坐标进行对比分析。由于测量的最终目的是为了获得起重机相关尺寸数据,故可将起重机上6个测量点中任意2点之间的距离作为一个尺寸测量长度进行数据对比。结果如5图所示。在15组数据对比中,摄影测量方法与全站仪方法的测量长度相对误差均在1.5%以内,最大相对误差为1.35%,最小相对误差为0.08%,平均相对误差为0.52%。通过对测量数据的处理分析可知,该摄影测量方法的测量结果与全站仪的测量结果基本相同,准确度和精确度都比较高,可满足港口起重机的尺寸测量工作。

图5 结果对比与误差分析
5 结束语
随着摄影领域硬件技术和软件技术的不断深入研究,摄影测量技术逐渐开始与计算机视觉、图像处理等高新技术融合,实现了向自动化和信息化的方向发展,兼具很多优点,使该技术在现代工程测量领域扮演越来越重要的角色。港口起重机的测量监测任务作为保证港口长期高效安全运行的重要方面,切实需要一种行之有效的测量手段。本文所述的无控制点摄影测量方法虽可初步完成港口起重机的测量监测工作,但仍有不足,如结构比较复杂、操作步骤多、智能化程度低等。因此,基于摄影测量的现有技术,不断发掘新方法,并应用于港口起重机的尺寸测量是一种良好的趋势。
猜你喜欢
航空学报(2022年5期)2022-07-04
幼儿园(2021年12期)2021-11-06
作品(2020年4期)2020-05-11
模具制造(2019年10期)2020-01-06
科学导报·科学工程与电力(2019年5期)2019-10-20
课堂内外·创新作文小学版(2017年1期)2017-06-01
海峡科技与产业(2017年3期)2017-04-13
小学生时代·大嘴英语(2015年7期)2015-11-23
为了孩子(孕0~3岁)(2009年6期)2009-07-15
