用新航向计算79号灯浮转向出口
2021-09-08 16:18陈志坚毛晓琳
中国水运 2021年8期
关键词:船舶
陈志坚 毛晓琳


摘 要:船舶在狭窄和弯曲航道内顺利完成转向是引航员的基本功,转向早了可能侵入它船航道;转向晚了可能冲出航道,由此造成搁浅、触礁。本文基于船舶常用的船速、转向角、转向角速度,用新航向计算,得出比较容易实现崇明航道79号灯浮转向出口的方法。
关键词:船舶;船速;转向角;转向角速度;转向方法
随着船舶助航仪器的进一步优化,除了借助于雷达、GPS等传统导航设备,现今电子海图与信息系统(ECIDS)和船舶自动识别系统(AIS)也被广泛运用到导航中。船舶转向操纵仅依靠传统的雷达观测、GPS定位、肉眼观测航标辅助、经验等方法已经相对落后。如何更好地、系统地计算出转向过弯时机,从而避免崇明航道出口转向点(即79号灯浮)转向时,本船转不过来冲出航道搁浅、与航道外锚地船舶发生碰撞;或本船在转向过早与长江口深水航道延伸段内进口船舶发生紧迫危险乃至发生碰撞。本文研究的内容是将转向操纵转化成量化的概念,这是本文学习研究的重点。
1新航向的计算方法
船舶的转向运动分为两个部分:一是船舶重心沿着新航向轨迹的线性运动,二是船舶自身转过一定角度的旋转运动。线性运动和旋转运动是同时进行的,所以航行时间和转向时间是相等的。
由于大型船舶的应舵时间和船舶惯性,在操一定舵角后,船舶将保持原航线前进,可以将船舶旋回圈做以下合理简化[1]:
(1)假定船舶在操舵后从A点到B点前,保持原航线航行,航向未改变。
(2)假定船舶驶过B点后,随着角速度的不断提高,船舶旋回的阻尼力矩不断增大,角加速度渐次降低,向定常旋回阶段过渡,斜航中船舶降速加剧。
观测图1可知:船舶在A点开始操舵后,船尾出现明显的向操舵相反一舷的横向移动,随后船舶开始发生船首偏转并开始转向。船舶从点A经过点B,到达新航向线的点D,并把定进入新航向。转向开始阶段,转向角速度较慢,船舶重心点轨迹近似看作是直线AB航行,长度为转向距离的一部分。假设转向轨迹BD是一段以E为圆心、BE为半径的圆,与B和D两点相切的圆弧,用R表示半径BE。可得公式:
一般从操舵开始到船首转过90°左右船舶快要进入定常旋回,速度不再下降[2]。旋回性越好,减速越明显。船舶转向中旋回减速,其幅度一般为操舵前船舶速度的25%至50%,超大型油船最大降速幅度甚至可以达到65%。一般来说,船速对船舶旋回所需时间长短具有明显影响,但对旋回初径大小的影响比较小。所以船舶在转向过程中的失速变化大小对转向距离不会产生太大影响,假设减少速度为20%[3]。
2崇明水道出口实际应用计算
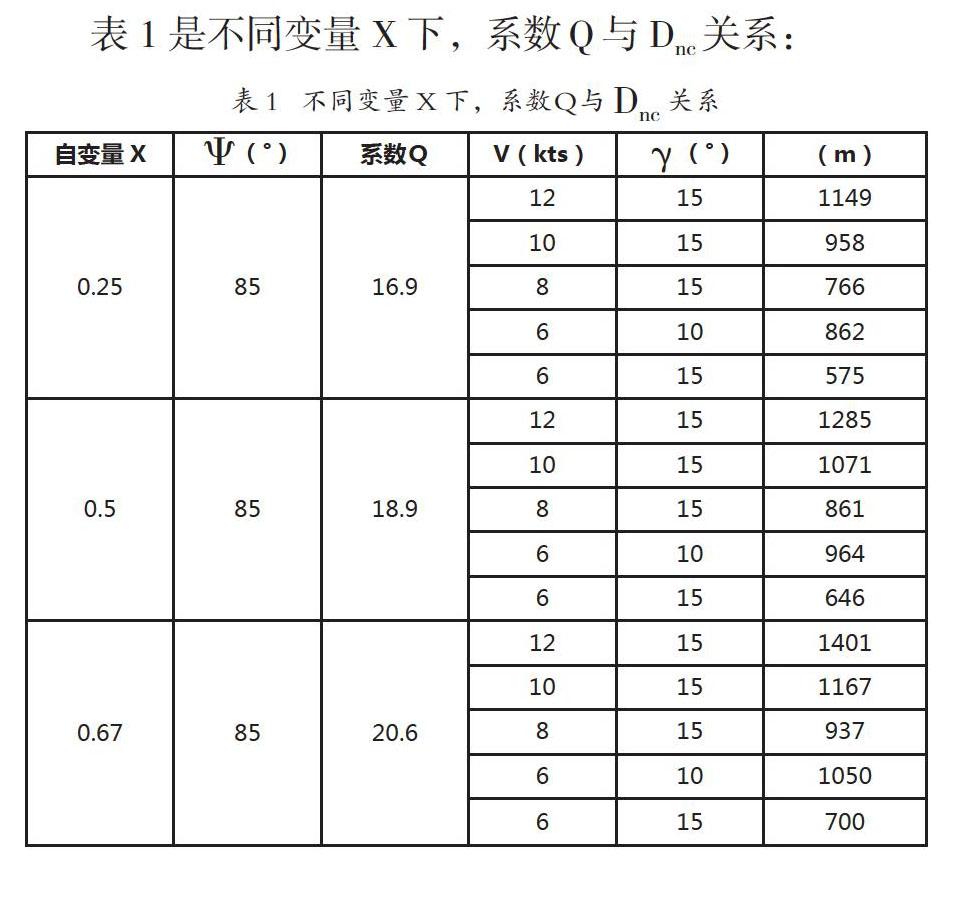
以船舶出崇明水道进入宝北航道转向点(即79号灯浮)转向角度计算为例,利用算式(4),使用船舶在通过该转向点时常用的船速和转向角速度,X值取3个有代表性数值0.25、0.5和0.67,计算Dnc和Q值数据结果。
根据上述图2、图3可知:在宝北航道北边线位置,初始航向为218°(以直角穿越态势做最初的航向),最终航向为135°(顺航道走向),最大转向可航宽度为1000米(航道宽度)。
根据表1可以得出结论:船速较快时的自力转向,如果不能达到一定的转向角速度γ,船舶很难在1000米以内成功转向出口。转向角取最大值85°,转向角速度取10°/分钟,或者15°/分钟。Q值随着X的增大而增大,速度与Q没有直接联系,但是转向所需距离与速度成正比。即得出:
(1)当X值较小时,即保向距离AB较短,船舶在开始操舵后快速开始旋转,所需值较小, Dnc也较小;
(2)当X值较大时,即保向距离AB较长,船舶在开始操舵后需要一定时间开始旋转,所需值较大, Dnc 也较大;
(3)转向角度Ψ对Q值的影响成正比例关系,转向角度Ψ越大,Q值就越大。
对于出口崇明水道的船舶,多以大型船舶或者对舵响应较慢的船舶为主(崇明出口的船舶由于水深限制,常要求保持较小吃水,舵叶面常露出水面一部分,影响舵效),大型船舶因为惯性大,不能在较短的时间内获得较大的转向角速度γ。在有了较大的转向角速度γ后,把定航向也会相应困难,大型船舶容易产生转过头等现象。然而小型船舶不一定要取小的Q值,大型船舶则一定要取较大的Q值更为安全。X值取太大和太小都不符合实际的转向操纵,合适的数值是在0.25—0.67之间。这样,Q值在17—24之间[4]。表2是船长和Q取值对照表。
对比崇明水道出口的情况,可知进入转向前的速度和转向角速度γ是我们能否在规定的航道内转向出口成功的关键。79号灯浮的航道转向点处的航道宽度小,转向距离受到限制,要靠提高转向角速度γ或者降低航速才能完成转向。转向前减速,转向时加车,增加舵力,是常见的大角度转弯的方法。减速航行后,所需要的转向角速度也相对较低。或者合理运用79号灯浮北面水域,提前转向保持进入航道边线时转向角小于85°或者接近预计出口航道的角度,提高转向出口的成功率。
3风流对转向的影响
从崇明水道出口船常安排急落水顶流出口,假设潮水流速为3节,转向时间为180秒,根据公式可得下漂距离为222米。顶流转向,要推迟转向或者降低转向角速度γ。因为船舶在前期受到流压易于船舶转向,当船舶与流向成垂直夹角时,转向变困难。如果初始航速快,转向中由于流速的叠加作用船舶失速情况小,航速几乎维持掉头前的速度,甚至更快。如果遇到突发情况往往后期很难再行自力调头。所以建议船舶尽量低速靠近79号灯浮北面水域后开始转向,后期如果遇到转向角速度小于10°时,通过加车增加舵效或者使用拖船协助。如果是顺流掉頭,顺流掉头初始航速很难控制,所以要长时间保持维持舵效的速度。顺流掉头中需要提前转向,适当的情况下要求拖船协助。船舶在转向过程中,在AB时间段应该保持航速尽量慢,在BC时间段根据转过的船头角度合理控制转向角速度γ,在后期CD应该减缓转向角速度,保持能够迅速把定船头。
4航行中注意事项
4.1转向中注意事项
航行过程中会有种种突发情况,穿越航道转向出口时存在多种风险。应当根据当时船位计算出转向角速度和本船航速关系,保持船舶稳定转向。在航行过程中,通过操舵和回舵等运用,结合AIS信息和驾驶台设备等核对船位与实时船舶航速,调节适合的转向角速度,并牢牢控制好航速。应该把转向角速度控制在理想值以上确保安全。如果遇到前期转向困难,AB的距离过大,就会造成整个转向过程仅仅是急转和急停两个阶段。此时,要迅速启用一切有利于加快转向的措施,如加大舵角、提高主机转速以及拖船协助等方法,为CD把定航向争取时间。否则最终可能偏出航道而搁浅或与锚地里他船发生碰撞。
4.2拖船的使用
崇明水道出口船舶常备有拖船护航,保持低航速才能让拖船在航行中协助取得最大效果。一般左转向的出口,可以配置拖船在左后方或右前船首附近。顺流掉头时,为控制航速也可以在船尾吊缆,用以制动,必要时抛短锚固定船艏,协助掉头。
4.3遇到船舶流密集情况的措施
在崇明水道出口时应该连续观测60号灯浮附近的进口船舶,在航经205灯浮时还应连续观测宝山大灯浮附近出口的船舶。保持良好的甚高频沟通船位通报,应避免在转向过程中有他船对本船有影响,尽量选择合适的档距。如果遇到长时间大批量船舶进出,可以选择在79号灯浮北面区域抛短锚等待。
4.4合理运用船上设备
根据国际海事组织(IMO)第73次会议对SOLAS公约第V章修正案的规定:2002年7月1日以后建造的50000总吨及以上的船舶必须安装转向率指示器,此前1984年9月1日以后建造的100000总吨及以上的船舶也必须安装转向率指示器。上海港是潮流港,在过79号灯浮时要正确判断潮流的流速,根据上述公式(6)估算出漂移的距离。在船舶转向过程中,需要多次调整舵角,适当调整转向角速度,并在压反舵阶段加大舵角以稳定在新航向。应结合航行设备,根据当时航速和转向角速度控制船舶转向,用舵情况不定。现阶段多种AIS移动设备端都自带转向角速度(rot)的显示,比如:Cenkin cp4-rot、KSN11-C。可以在转向过程中数值的变化用做参考值。
5结论
本方法是基于船舶常用的航速、转向角、转向角速度,运用简单的数学公式得出的结论。在转向过程中,转向角速度γ起着决定性作用。操纵者需要实时比较转向角和转向角速度。因为转向角速度γ变化快,如果无法达到计算公式中的恒定值,需要运用一切有效手段来保持轉向角速度的数值,完成整个航行过程。
参考文献:
[1]傅大平,邵志伟.满载超大型船舶在弯道突遭浓雾时的安全转向[J].航海技术,2019(01):43-47.
[2]洪碧光.船舶操纵原理与技术[M].大连:大连海事大学出版社,2007.
[3]李宗波,张显库,贾云.船舶转向过程中速度下降问题的研究[J].航海技术,2008(03):2-4.
[4]李祖飞. 一种新航向距离的简易算法及应用[A].中国引航协会、中国航海学会引航专业委员会.中国引航论文集 2017[C].{4}:上海浦江教育出版社有限公司,2018:5.
猜你喜欢
装备维修技术(2022年7期)2022-07-01
科学导报(2021年81期)2021-11-27
科学与财富(2021年35期)2021-05-10
智富时代(2019年3期)2019-04-30
智富时代(2019年3期)2019-04-30
伙伴(2018年1期)2018-05-14
中国水运(2016年9期)2016-05-14
珠江水运(2015年15期)2016-02-21
航运交易公报(2015年38期)2015-12-01
航运交易公报(2015年25期)2015-07-03