
纬度差异对多舰协同被动定位目标精度的影响分析
2021-09-08 12:09孙文川刘维国吴延军庄锦程
火力与指挥控制 2021年8期
孙文川,刘维国,吴延军,卫 鑫,庄锦程
(解放军91550 部队,辽宁 大连 116023)
0 引言
超视距作战是指对目视无法观察到的作战目标进行武器投射的作战形式。随着巡航导弹射程的增加,舰艇平台只有依靠超视距探测手段,才能实现反舰导弹在超视距目指信息引导下的对敌攻击。目前,舰艇获取超视距目标指示的手段主要分2类:单舰平台探测目指信息和外部中继平台提供目指信息。其中,外部中继平台提供目指信息主要包含依托岸基超视距雷达、预警机、侦察卫星和与编队其他舰艇协同等方式[1]。
舰载超视距雷达探测目标又分为主动和被动两种方式。主动超视距探测主要利用大气波导效应实施,其需要本舰雷达向外发射电磁波,并通过捕捉的回波信号计算目标的方位和距离,一旦主动发出的电磁波被对方舰艇侦测到,很容易暴露本舰的位置,对作战造成不利[2-4];被动方式主要利用对流层对电磁波的散射实现对超视距目标的探测,该方式具有探测距离远、探测隐蔽的特点,但其只能提供目标的方位信息,不能提供目标的距离信息,在作战过程中,如需获得目标的准确位置,就需要通过多舰协同的方式对超视距目标进行前方交汇定位[5-6]。
在舰载超视距雷达方面,20 世纪末俄罗斯研制了“米涅拉尔”主/被动超视距雷达,在大气波导条件下,其主动雷达可探测距离200 km 左右的目标。其被动探测则利用对流层散射实现,对L 波段特定的雷达信号,探测距离可达450 km 左右,并实现了多舰协同条件下的三角定位[7]。
1 舰艇被动超视距探测目标原理
对流层的高度一般在15 km 以下。通常情况下,对流层的温、湿、压随高度的增加而减小。但在某些情况下,也会出现随高度的增高而增加的情况,即出现了逆温层。如图3 所示,在对流层中,上升气流的不均匀性导致了许多尺寸大小不一的涡旋气团的产生,形成了不均匀介质体,其内部介电常数的随机小尺度起伏,与周围空间的介电常数有着微小的差别。当电波射向这些不均匀体时,其产生的感应电流,会将入射的电磁能量向四面八方散射。当雷达发射的信号穿过这些区域时,能量就会被湍流团散射而传到视距不可见的区域,形成超视距传播,舰载被动超视距雷达就是基于该原理实现对超视距目标进行探测[8]。
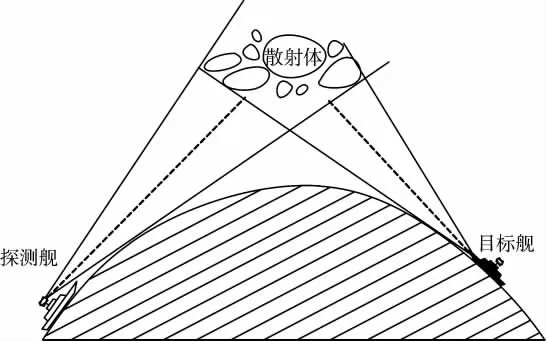
图1 舰艇平台进行微波超视距无源探测原理图
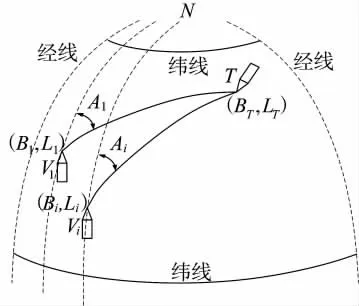
图2 多舰协同被动定位目标位置示意图

图3 目标舰坐标归算示意图
2 多舰协同探测目标位置解算方法
2.1 基本原理
图2 为被动超视距条件下,多舰协同定位目标

2.2 解算模型
2.2.1 地理坐标框架下目标位置解算原理
探测舰Vi相对于目标舰T 的球面距离为di,若已知方位角Ai,则目标舰相对于测深舰的坐标差为[12](图3):

在这里需注意,Δxi和Δyi是两坐标点间的距离,为了得到目标舰在地理坐标系下的坐标,需将其转化为相应的纬度差ΔB 和经度差ΔL。

式中,SB和SL分别为纬度和经度尺度因子,它们是子午圈曲率半径M 和卯酉圈曲率半径N 的函数:

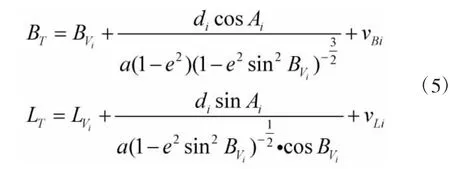
由式(5)可得到椭球面上,探测舰Vi与目标舰VT之间的角度、位置关系[13]。式(5)中BT、LT和di为未知量,显然,当以上观测结果超过2 组时,可求解目标舰VT的经纬度BT、LT和探测舰与目标舰的球面距离di。
2.2.2 多舰协同估计超视距目标位置
当探测舰数量超过2 艘时,将各已知参数代入式(5),可得以下方程:
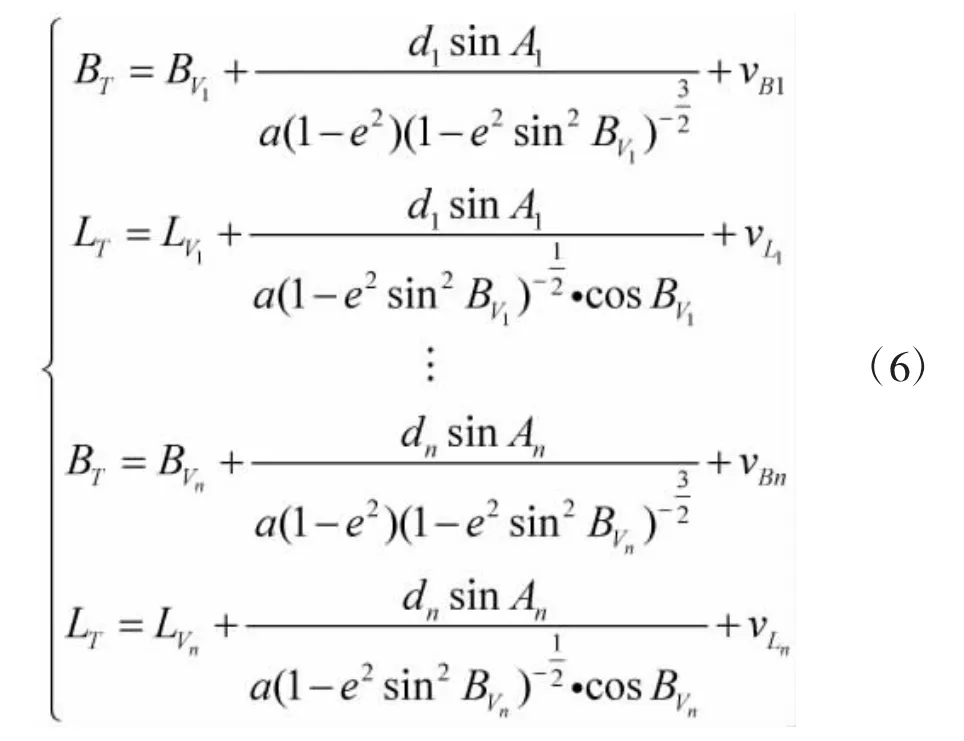
其中,BVi、LVi为各探测舰Vi的纬度和经度,di为各探测舰Vi与目标舰VT之间的球面距离,Ai为探测舰相i 探测到目标舰的大地方位角,vB1和vL1为对应的纬度和经度误差。令:

相应的目标舰目标舰VT的纬度和经度(BT,LT)即可得解。
3 仿真校验
3.1 双舰协同条件下定位精度
由第2 节中推导可知,2 艘探测舰艇协同,即可实现对目标舰位置的探测;由于舰艇的活动区域主要分布在南北纬65 °之间,在此分别对低纬(赤道0°)、中纬(30°)、高纬(65°)条件下,多舰协同定位的误差进行仿真分析。如图4 所示,令目标舰T相对于探测舰V1的方位角A1在0°~360°之间变化(V2距离V120 km,位于探测舰V1的A1+90°方向);探测距离d1为20 km~300 km 之间变化时,计算双舰协同探测的定位结果T'偏离目标舰T 的球面距离S。
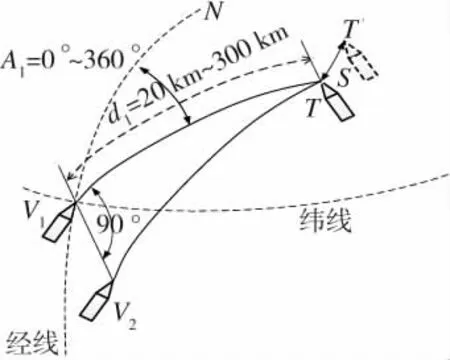
图4 双舰协同定位仿真原理图
图5 为探测中心位于低纬度附近(赤道)时,双舰协同条件下300 km 以内的定位误差分布情况,由图5 可以看出:由于赤道附近受地球曲率影响较小,双舰协同被动定位的误差在250 m 以内,具有较高的定位精度,可以满足为反舰巡航导弹提供目指位置信息的精度要求。

图5 低纬度下协同定位误差分布图
当探测中心位于中纬度附近(30°N)时,如图6所示,双舰协同条件下300 km 以内的定位误差分布情况,可以看出:受地球曲率影响,沿经线方向,随着目标距离的增大,定位误差的变化较为剧烈,最大可达到8.7 km,沿纬线方向,变化相对较为平缓,最大误差在5 km 以内。
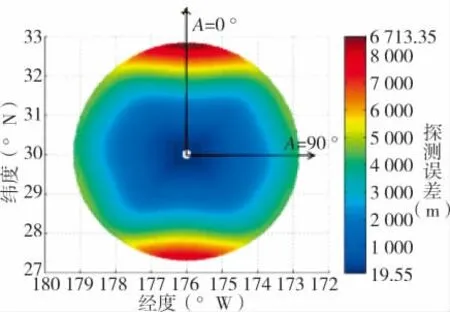
图6 中纬度下协同定位误差分布图
如图7所示,当探测中心位于高纬度附近(65°N)时,受高纬度地球曲率变化的影响,沿经线方向,随着目标距离的增大,定位误差的最大值可达到34 km,沿纬线方向,变化相对较为平缓,最大误差在20 km 以内。
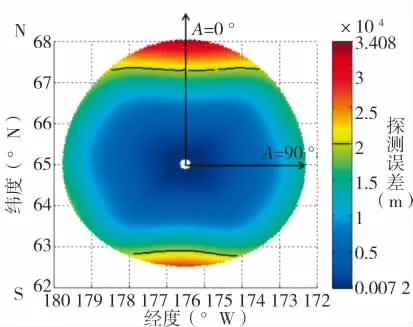
图7 高纬度下协同定位误差分布图
基于以上的仿真分析,可以看出本文提出的定位方法受地球曲率影响较为明显,在中低纬度具有较好的定位精度。在实际的使用过程中,可根据探测舰所处的纬度位置,对协同定位误差进行估算。
3.2 三舰协同条件下定位精度
如图8 所示,采用本文提出的定位方法对距探测舰300 km 外的目标舰T 的位置(真实位置为:156.447 3°E,31.235 8°N)进行解算,分别对2 艘探测舰条件和3 艘探测舰条件下的目标探测结果进行对比,比对两种情况下定位误差的大小(表1)。可以看出,此种情况下,相比于1、2 舰协同探测的结果,增加了一组观测量后(1、2、3 舰协同探测),对目标舰T 的位置估计结果具有较小的径向偏差,坐标位置更接近目标T 的真实位置,具有更高的探测精度。

图8 不同数量探测舰下目标定位精度比较
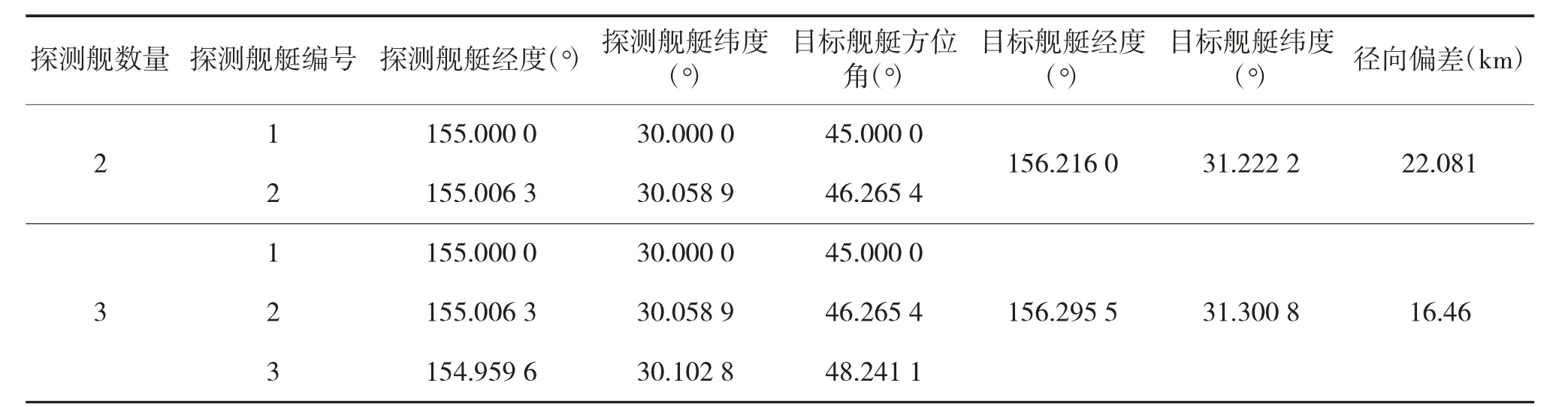
表1 定位精度比较结果
4 结论
基于舰艇平台可进行微波无源探测超视距目标的手段,重点对纬度差异对多舰协同被动定位目标精度的影响进行了研究。并通过仿真计算,对该定位方法产生的定位误差进行了分析,仿真结果表明:该方法在中低纬度具有较高的定位精度,可为反舰导弹提供有效的目指信息引导;在高纬度地区,受地球曲率的影响,定位误差较大。最后,通过计算验证了增加探测舰数量,可有效提高舰艇编队对舰艇目标的探测精度。该方法可为在中低纬度作战舰艇编队进行超视距目标协同定位、引导反舰导弹进行超视距反舰作战提供参考。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
北方交通(2022年6期)2022-06-18
导航定位学报(2022年1期)2022-02-17
VOGUE服饰与美容(2020年5期)2020-09-03
中国计算机报(2020年9期)2020-03-25
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
科技视界(2018年8期)2018-06-08
居业(2017年5期)2017-07-24
