
新能源汽车制动能量回收控制策略的研究
2021-09-07 10:30吴凯龙郑建立
科技风 2021年19期
吴凯龙 郑建立

关键词:新能源汽车;制动能量回收;蓄电池;模糊控制
新能源汽车因其零排放等节能环保的优势逐渐成为汽车行业发展趋势,然而续航里程短的问题却严重制约了其发展,制动能量回收技术是解决该问题的有效手段之一。本文从制动能量回收效率与蓄电池保护角度出发,设计以电池荷电状态SOC、制动间隔时间t、制动强度z和车速v为输入的模糊控制器,根据其输出的制动力分配系数k来分配电机制动力。在Matlab/Simulink中实现本文设计的模糊控制器并与Carsim所提供的精准车辆模型联合仿真,通过仿真实验结果验证本文提出的控制策略对能量回收以及蓄电池保护的效果。
1能量回收模型介绍
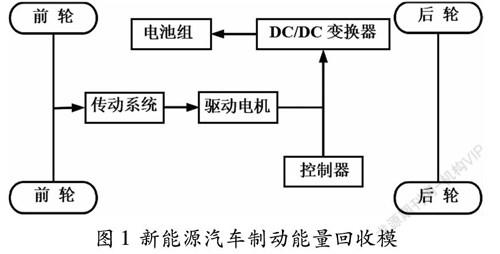
车辆制动时,控制器通过对此时整车情况的分析处理,分配电机制动力及机械制动力的比例进而控制驱动电机产生相应的制动力。在此过程中,驱动电机处于发电状态,通過变换电路对电池进行充电以实现能量回收;同时电机转子切割线圈磁场所产生的感应电流和感应电动势将形成制动力矩使电机减速以产生电机制动力矩,通过传动系统作用于驱动轮进而实现制动。能量回收模型如下图1中所示,制动能量依次经过驱动轮、传动系统、驱动电机、DC/DC变换器,最终到达储能装置电池组,实现制动能量的回收。
2基于制动强度的前后轮制动力分配
车辆在制动中前后轮都抱死时,若前后轮制动力分别等于其附着力,则此时车辆的制动效率最高、稳定性最强,此状态下车辆前后轮制动力的关系即理想制动力分配曲线,简称I曲线。
ECE R13道路安全法规规定车辆在路面附着系数0.8之间时,其制动强度必须满足:≥0.1+0.85(-0.2),此时前后轮制动力的关系称为M曲线。
I曲线和M曲线见图2所示。首先,为保证车辆制动稳定性以及安全性,前后轮制动力分配应处在两曲线之间;其次,为提升能量回收效率,应尽量多地让前轮参与制动。
3基于模糊控制的制动力分配策略
3.1模糊控制器设计
影响车辆制动时能量回收的主要因素是制动强度、制动力需求、电池荷电状态以及车速,模糊控制器的输入通常从以上因素选择并以电机制动力的占比作为输出。本文设计的制动力分配模糊控制结构如图3所示,考虑目前日益高发的城市交通拥堵路况,低速频繁制动回收能量低且频繁充放电有损蓄电池寿命,本文基于此添加制动间隔时间t与制动强度z、电池荷电状态SOC及车速v作为mamdani型模糊控制器的四个输入,以电机制动力分配系数k作为输出,设计模糊控制器。
3.2模糊控制器规则
基于本文制动力分配策略对各输入变量进行分析,可制定本文模糊控制器的规则。
将制动强度z的模糊子集划分为{L(低)、M(中)、H(高)},设其范围为0到1;电池SOC的模糊子集划分为{L(低)、M(中)、H(高)},设其范围为0至100;将制动间隔时间t的模糊子集划分为{L(低)、M(中)、H(高)},设置其范围O至30;最后将车速v的模糊子集划分为{L(低)、M(中)、H(高)},设其范围为0至150;输出的制动力分配系数k的模糊子集则划分为五种情况:{VL(很低)、L(低)、M(中)、H(高)、VH(很高)},设置其范围0至1。
根据以上输入输出的分析,设计模糊控制规则表,如下表1所示。
4仿真与分析
根据本文制定的能量回收模糊控制策略,在Matlab/Sim-ulink中搭建控制器模型(如图4),并与可提供精准车辆动力学模型的Carsim软件进行联合仿真,采用WLTC工况(如图5)进行仿真实验。WLTC循环工况参数如表2所示。
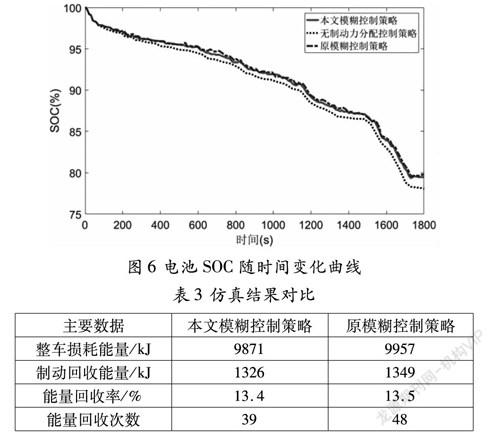
通过将本文模糊控制策略与不加入制动间隔时间输入约束的原模糊控制策略以及无制动力分配控制策略三种情况下的仿真结果输出,得到三条电池SOC值变化曲线如图6中所示,统计两种模糊控制策略的仿真结果数据如表3所示。
通过图6可得知本文模糊控制策略的电池SOC终值为79.5%,高于无控制策略的77.6%,与未加入制动间隔时间输入约束的原模糊控制策略的79.7%相差无几;同时,通过表3可以看出本文模糊控制策略回收的能量以及回收率在与原模糊控制策略几乎无差别的基础上,能量回收次数只有39次远低于原模糊控制的48次,减少了充电次数。
综上所述,本文所设计的模糊控制策略在提高了蓄电池安全性的同时,依然保持着出色的能量回收效率。
5结语
本文从制动能量回收效率与蓄电池保护出发,基于理想制动力分配曲线及ECE法规曲线的前后轮制动力分配,设计了以电池荷电状态、制动间隔时间、制动强度和车速作为输入变量,电机制动力分配系数为输出变量的能量回收模糊控制策略,在Matlab/Simulink实现控制器并与Carsim进行联合仿真实验,实验结果证明本文制定的能量回收控制策略在有效提升蓄电池安全性的同时,依然保持着出色的能量回收效率。
猜你喜欢
汽车与驾驶维修(维修版)(2019年4期)2019-09-10
消费导刊(2019年6期)2019-08-22
中国测试(2018年9期)2018-05-14
现代职业教育·中职中专(2018年7期)2018-05-14
神州·中旬刊(2017年1期)2017-06-28
科学与财富(2016年15期)2016-11-24
大经贸(2016年9期)2016-11-16
中小企业管理与科技·上旬刊(2016年10期)2016-11-15
现代电子技术(2009年13期)2009-08-31
科学种养(2009年6期)2009-06-03
