
内蒙古兴安盟基于激光测距的作物冠层高度研究现状
2021-09-06 02:20:22高春香杨玉辉
中国农学通报 2021年22期
高 雷,高春香,杨玉辉
(1兴安盟扎赉特旗气象局,内蒙古兴安盟扎赉特旗137600;2内蒙古自治区气候中心,呼和浩特010051)
0 引言
目前,中国的农作物观测技术还相对落后,冠层高度的测量还是以人工测量为主,此方法费时费力,难以对作物进行实时连续测量,且测量数据误差大、时效性差。随着现代电子、通讯和计算机技术的发展,冠层高度的自动化测量也取得了不少进展,但仍有很多不足。
1995年Shimizu等[1]设计了包含CCD摄像机和红外照明器具的计算机视觉系统,对植株进行非接触式、立体生长分析。但是该方法对实验环境的要求太高,无法在实际农田对植株长势进行连续性监测。2004年高巍等[2]介绍了一种非接触式的作物高度测量装置。该装置将超声波测距传感器安置在装置上方,通过垂直向下发射超声波获取作物冠层与传感器之间的距离,进而推算出作物的高度。但该装置仅能对传感器正下方的作物进行高度测量,且超声波测距传感器本身存在反射、噪音、交叉等问题,也会对测量结果产生影响。2008年武传宇等[3]研发了一种作物植株高度的硬件装置。它利用光电扫描系统连续扫描农作物,并采用自上而下的方式判断光接收器的状态,从而提取当前位置植株的边缘高度数据。但该方法不适合进行长期自动测量,且使用的传感器较多,价格高昂。2010年马彦平[4]设计了一种基于双目视觉的田间作物高度测量技术,并通过多标杆辅助的方式完成高度测量。但是过多的标杆会影响正常的农事活动,且该技术的硬件成本较高。余正泓[5]设计了一种新的作物自动测高装置,该装置利用微处理器控制伺服电机转动,使其带动红外测距传感器对作物进行自动扫描,完成冠层顶端的确定,同时超声测距传感器测出传感器当前高度,完成高度测量的工作。但该装置结构复杂,对安装要求较高,大田环境下部件容易受损。
为了实现农业高质、高效、绿色可持续发展,内蒙古兴安盟不断加强作物长势自动观测系统建设并且成果显著,大田作物冠层高度测量仍是作物长势自动观测的难点。早期传统的测量方法是技术人员深入田间,测量几个区域的平均高度值,工作量较大,测量结果容易受人为因素影响。之后又尝试采用标杆法[6],通过图像采集,对比标杆尺寸测量作物冠层高度,但是该方法测量局限性较大,只能通过标杆周围苗的高度判断整个区域苗冠层高度。另外,田间标杆影响正常农事活动,给机械化作业带来诸多不便。针对上述方法存在的工作量大、测量精度低等问题,结合本地区作物情况,相继尝试了2种作物冠层高度识别方法,即基于作物图像的冠层高度测量方法以及基于激光测距的冠层高度测量方法[7-8],尤其是基于激光技术的田间冠层高度测量技术,通过将激光测距仪安装在三维旋转云台上,实现对观测区域的动态扫描,获取冠层位置点集,结合内角误差修正、三角几何换算、数据拟合等方法[9],得到作物冠层高度。并经过连续2年针对春玉米观测试验,最终验证方法的有效性和可行性[10]。
1 测量方法
1.1 基于图像的作物冠层高度识别[11]
本地区初期主要采用基于图像的作物冠层高度识别方法,即利用单目相机实时采集作物的生长图像,图1所示即为对同一位置的春玉米植株在3种不同发育期(七叶期、拔节期、抽雄期)所拍摄的图像。结合作物生长规律,通过图像分割、图像识别以及拟合算法,从图像中计算出作物的冠层的高度信息[12]。该方法实现了对作物冠层高度远程、自动连续测量,大大降低了观测人员的劳动强度,较大程度地降低冠层高度识别装置对农事活动的影响。但后期测量实验结果表明,该方法由于采集的图像本身只具有二维信息,缺少第三维信息,单纯从图像中对作物的冠层高度进行测量的准确度并不理想[13]。例如,在植株生长前期(图1七叶期),若以根部为底点,无法沿着主茎找到其对应的冠层顶点,导致无法测量其高度;直接从图像中判断作物叶片的冠层最高点也不可行[14]。对于生长的中后期(图1拔节期和抽雄期),由于植株叶片重叠严重,同样没有办法对其冠层高度进行准确测量[15]。因此,在对作物冠层高度能够实现远程、自动连续测量的前提下,需要进一步借助其他硬件装置来提高冠层高度的测量准确度[16]。

图1 春玉米植株的不同发育期
1.2 基于激光测距的作物冠层高度识别
针对基于图像的作物冠层高度识别方法存在的准确度问题[17],本地区之后采用了基于激光测距的作物冠层高度识别技术,该技术将激光测距仪安装在三维旋转云台上,通过控制激光测距仪的发射角度,使测距仪按照一定的轨迹对作物冠层进行扫描测量,并对扫描结果进行内角误差修正、三角几何换算、数据拟合筛选处理后,得到作物冠层高度的最大值和平均值[18]。
图2为基于激光测距的冠层高度自动测量装置以及组成示意图,装置包括测量单元、采集和控制单元、数据处理中心和通讯单元;测量单元包括激光测距传感器、重力感应传感器和三维旋转云台;测量单元、采集和控制单元通过通讯单元与数据处理中心进行连接通信[19]。

图2 基于激光测距的冠层高度自动测量装置以及组成示意图
将带有三维旋转功能的激光测距仪安装在待测量的农作物观测站点,针对所测作物种类确定仪器安装高度,并设定激光测距仪的扫描范围;测量开始前,系统自动调整激光测距仪垂直正对地面,测出激光发射口距离地面的高度;根据设定的扫描范围确定测距仪的扫描轨迹,确定激光测距仪扫描的起始位置和结束位置,系统从起始位置开始,根据上述确定的扫描轨迹,控制测距仪进行水平方向和垂直方向上的运动,并在每旋转一定角度时进行一次测量,每次测量得到一个距离值、一个垂直旋转角度和一个水平旋转角度;测距仪垂直旋转时,激光口距地高度会发生变化,为提高测量精度,可先利用内角误差修正公式修正激光发射口高度,然后结合上述测量结果,通过三角几何关系计算出当前扫描点的高度值[20]。仪器重复进行上述测量计算过程,直至测距仪旋转至上述结束位置,测量结束获得一个扫描周期内所有扫描点的高度序列,数据采集处理模块对上述数据进行存储和筛选,通过拟合运算等处理,最终得出当前测量区域内作物冠层高度的最大值和平均值[21]。
2 测量区域与结果分析
测量区域选择了突泉县,在该地区搭建了带有三维旋转功能的激光测距仪,如图3所示,并选择了春玉米作为观测对象。从2018年开始使用激光测距仪对春玉米进行了连续2年的冠层高度自动测量,同时在相同日期相同观测区域安排人工对玉米冠层进行观测,其中2018、2019年观测结果如表1~ 2所示。从表1和表2可以看出,在整个春玉米发育期(三叶、七叶、拔节、抽雄、乳熟、成熟),自动观测高度和人工观测高度误差[22]在15 cm以内。其中发育期前期误差相对较小[23](三叶、七叶),普遍在5 cm以内;发育期中期和后期相对大一点,在10 cm左右。这是由于随着植株生长,植株重叠严重,会一定程度影响测量的准确性,但整体而言基于激光测距的高度识别技术不仅能够实现对作物冠层高度的远程、自动连续测量,在作物高度识别方面也展现出了较出色的识别准确度和识别效率,降低劳动强度的同时,也提高了测量效率和可靠性[24]。

图3 具有三维旋转功能的激光测距仪

表1 2018年观测结果 cm
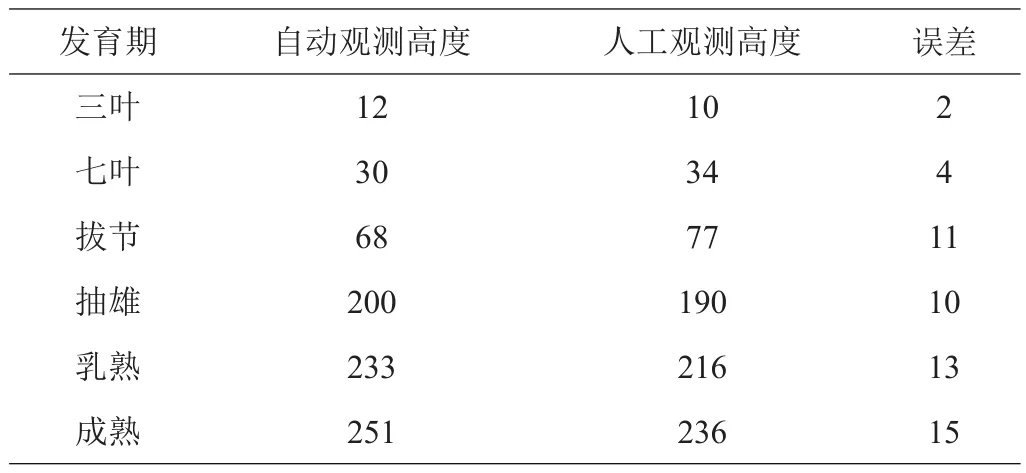
表2 2019年观测结果 cm
3 结论与讨论
本文主要论述了内蒙古兴安盟作物冠层高度识别的研究现状,介绍了本地区近年来在作物高度识别方面主要采取的2种识别方法,即基于图像的作物冠层高度识别和基于激光测距的作物冠层高度识别[25]。并着重介绍了基于激光测距的作物冠层识别方法,该方法将激光测距仪安装在三维旋转云台上,按照一定的轨迹对作物冠层进行扫描测量,经过内角误差修正、三角几何换算、数据拟合筛选处理后最终得到作物冠层高度。结合连续2年的观测试验,证明了该方法不仅能够实现对作物冠层高度的远程、自动连续测量,同时在作物高度识别方面展现出了较出色的识别准确度和识别效率,验证了该方法在作物冠层高度识别上的可行性和有效性。
猜你喜欢
中国农业信息(2022年1期)2022-05-25 13:31:46
农业机械学报(2021年11期)2021-12-07 05:36:44
大气科学(2021年1期)2021-04-16 07:34:18
测控技术(2018年6期)2018-11-25 09:50:24
测控技术(2018年12期)2018-11-25 09:37:26
通信电源技术(2018年5期)2018-08-23 01:16:04
制导与引信(2017年3期)2017-11-02 05:17:00
价值工程(2017年8期)2017-03-25 10:16:21
农业环境科学学报(2017年2期)2017-03-20 14:57:37
卷宗(2017年1期)2017-03-17 09:14:36
