
高分辨率跨孔超声波透射成像研究与应用
——以某水库大坝裂隙探测为例
2021-09-06 11:31卢圣力赵仁基
长江科学院院报 2021年9期
王 薇, 卢圣力, 赵仁基, 林 松,5
(1.中国地震局 地震研究所, 武汉 430071; 2. 地震预警湖北省重点实验室, 武汉 430071; 3.湖北省地震局, 武汉 430071; 4.浙江省第十一地质大队,浙江 温州 325006; 5.武汉地震工程研究院有限公司,武汉 430071)
1 研究背景
随着南水北调工程的推进,国家对大中型水库的建设和维护工作逐渐重视。水库蓄水后,大坝有可能出现裂缝,主要原因有两点:一是大坝在施工过程中,坝体混凝土的质量比较差,导致在施工期间和使用期间出现了许多明显的裂缝[1];二是后期蓄水后,大坝压力和压强发生了较大变化,导致混凝土出现裂缝。此外,混凝土的溃决模式多为瞬间溃坝,应急时间较短[2-4]。无论是哪种原因,坝渗漏影响水库发电、供水、灌溉等效益的正常发挥,严重者甚至直接威胁工程安全,存在溃坝风险[5],轻则影响水库蓄水能力,重则影响下游人民生命财产安全。2018年7月23日,老挝的Xe Pi-an Xe Namoy hydroelectric power plant(桑片-桑南内水电站)大坝溃坝,造成20多人遇难,上百人失踪[6],造成的影响引起全球关注[7]。为此,在水库蓄水后,及时发现大坝渗漏的具体位置和规模,为后期水库大坝渗漏处理提供检测依据显得尤为重要。
水库大坝型式多样,渗漏表现形式及原因各异,且渗漏病害具有较强的隐蔽性[8],因此,渗漏检测与诊断是一项复杂和系统的科研工作[5]。大坝渗漏检测技术因大坝型式不一,场地大小不尽相同,影响着检测手段的选择。近几十年来,水利工作者和学者们对混凝土和土石坝渗漏检测进行了大量的研究工作,郭凯[9]利用高密度电法反演圈定渗漏位置;谭磊等[10]对水库大坝探测及定向处理技术进行研究;赵明阶[11]利用波速和电阻率联合成像对大坝渗漏位置进行试验;赵汉金等[12]采用并行电法技术并结合瞬变电磁法对水库大坝进行多高程的隐患探查;毛先进等[13]利用地震CT探测引起坝基渗漏的复杂问题。然而,水库大坝坝体长宽不一,多种检测手段与场地是否宽阔相关。例如,大坝范围太小,高密度电法无法展布更长的测线,导致二维电阻率剖面首尾盲区缺陷;瞬变电磁法可克服二维电阻率剖面由于场地原因产生的盲区,但对现场电磁场非常敏感,导致结果分辨率不够;井间CT技术两钻孔之间的距离太近,初至时间不易准确拾取,距离太远,分辨率无法满足要求。因此,开发一种不受场地范围限制、分辨能力和抗干扰能力强的检测手段迫在眉睫。
本文将在桩基检测中发挥重要作用的超声波跨孔透射引入水库大坝渗漏检测,通过获取的跨孔超声波初至走时进行速度反演,将时间曲线、速度成像剖面以及钻孔资料对比分析。结果表明,在水库大坝渗漏检测中,跨孔超声波成像可对渗漏位置及范围进行精确探测,分辨率可高于0.2 m。该方法的成功引入,在小型大坝检测中,可克服其他检测方法场地范围不足、分辨率不高的缺陷;在大型大坝检测中,可作为其它检测手段的二次复查,确保检测隐蔽渗漏位置的准确性,为后期大坝渗漏处理和水库稳定性评价提供可靠的检测依据,同时能节约经济成本,具有较高的应用价值和科学意义。
2 工程概况
某水库位于浙江境内,水库建于20世纪50年代初,水库主坝坝型为黏土心墙砂壳坝,大坝坝顶长47 m,坝顶宽3.5 m,总库容10.7万m3,坝顶高程为42.5 m,最大坝高为24.2 m;正槽式溢洪道位于大坝右岸,水库俯瞰图表现为不规则U字形(图1),水库主要功能是对城镇供水和农业灌溉。水库下游为繁华的城镇,居民众多。坝坡为原始地貌,无扰动;坝基在坝肩修筑前进行过多次测试,无渗漏;水库蓄水后,坝肩外侧出现漏水痕迹,水位到达37 m后,坝肩外可见明显细流;经多次检查,推测坝肩混凝土内部出现裂缝,裂缝位置与发育规模不详,为配合大坝裂隙(图1坝肩中细线)探测,在坝肩按照3 m间距布设了4个钻孔,分别是ZK1、ZK2、ZK3、ZK4。
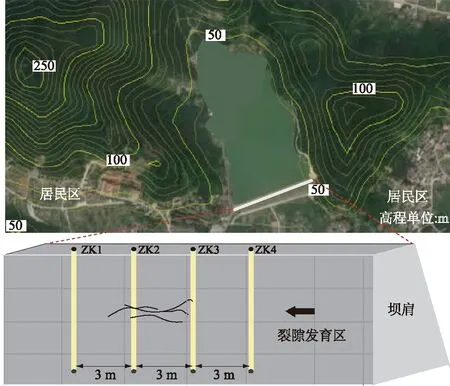
图1 水库俯瞰形态及坝肩示意图Fig.1 Overlook of the reservoir and diagram of dam abutment
3 方法原理与参数
综合分析水库坝肩形态和现场干扰条件,坝体渗漏检查方法选取了跨孔超声波成像技术,并借鉴地震CT的方法对获取的时间曲线进行速度反演。由于坝肩主要由C25混凝土组成,通过钻芯取样并进行波速测试,完整坝肩声波传播速度一般在2 700~3 500 m/s之间,而裂隙发育对纵波的传播速度影响较大,波速一般在1 500~2 500 m/s之间。因此,完整的混凝土与裂缝之间的物性差异较为明显,为利用速度反演剖面查找渗漏位置提供了前提条件。
3.1 方法原理
超声波本质上是一种纵波,频率比普通声波要高,当遇到不同介质时,在介质的表面处根据斯涅耳定律发生折射等现象[14]。由于不同介质对于声波的阻力不同,因此超声波在穿过不同介质时会发生声速、波幅等的变化[15]。将获取的时间曲线按照射线追踪原理提取初至时间,根据费马原理,从发射源到接收点的首波路径是耗时最少的,因此,通过首波射线追踪即为最佳路径的射线追踪[16-17]。在跨孔测试过程中通过扇形测试获取每一条射线接收超声波检测的初至时间(图2)、射线路径以及慢度组成的矩阵方程来获取两孔之间的剖面速度结构图像,其基本方程为

图2 跨孔超声波透射与成像原理Fig.2 Schematic diagram of cross-hole ultrasonic transmission and imaging
(1)
式中:lij为第i条射线在第j个单元内的路径长度;Sj=1/Vj为第j个单元的慢度值,Vj为第j个单元的纵波波速;ti为第i条射线的旅行时;N为剖面内的射线数;M为剖面网格数量。通过矩阵方程进行反演,在剖面速度结构图像中可根据速度差异准确判断裂隙情况[17]。
3.2 工作方法与参数选择
本文选取坝肩中部位置进行钻孔、取芯,在坝肩中部布设4个钻孔(图1),相邻两孔间距为3 m,钻孔深度均为20 m。在超声波透视数据采集过程中,利用相邻两孔相互配对,一孔进行发射,另外一孔为接受孔,由于超声波衰减较快,在数据采集之前,对超声波频率进行了试验,最终选择10 kHz频率超声波进行数据发射。数据采集分为两个过程:①发射孔与接收孔在同一深度同步移动接收全孔数据;②利用谷鸿飞[18]所提及的PSD判别法对①所获取的时间曲线进行判断,时间超过平均时长的位置进行定点发射,接收孔内探头在能清晰获取初至时间的扇形范围内按照0.1 m间距上下移动,从而对裂缝发育位置的速度结构进行完整补充。通过①和②2个过程,可为速度反演提供准确的初至时间。
3.3 数据处理
初至时间拾取及反演模型的建立是超声波透射数据处理的关键工作。钻孔的倾斜程度直接影响到初至时间的准确性;在进行初至时间拾取前,首先要对钻孔倾斜度进行校正,此外,原始数据采集过程中的干扰和杂波也会导致初至时间模糊。为更加准确地拾取初至时间,需要针对数据本身进行必要的滤波处理,使得初至起跳时间更加清晰。由于传播速度较快,时间短,准确的初至时间是建立速度模型的基础,而速度模型是否合理将直接影响反演结果。本文采用快速射线追踪技术和SIRT(Simultaneous Iterative Reconstruction Technique)算法对建立的初始模型进行反演,按照图3所示流程进行数据处理,从而获取速度结构图像。

图3 速度层析成像处理流程Fig.3 Processing flow of velocity tomography
4 裂隙检测成果分析与解释
按照图1中所布设的4个钻孔,通过超声波透射,相邻两孔各获取两组时间曲线(图4):一组为发射与接收在同一位置从孔底到孔顶的时间曲线(图4(a));一组为异常位置定点发射,接收孔在可获取清晰初至时间的扇形范围内接收(图4中(b)或(c))。利用文中所提及的PSD判别法可获取声速临界速度线,而声速临界速度线与时间线可以相互转化。本文仅选取利用钻孔ZK1与ZK2所形成的上述时间曲线(图4)为代表进行论述。

图4 超声波透射时间曲线Fig.4 Time-history curves of ultrasonic transmission
经过PSD判别法获取的时间临界线为106 ms,因此,图4(a)可以106 ms为分界线,根据波的传播原理,初至传播时间<106 ms的深度位置表现为完整的坝肩,初至传播时间>106 ms的深度位置也即B区域推测有裂隙发育。图4(b)所示时间曲线为在ZK1中以5 m(A处)为定点发射,在ZK2中以5 m为中心的扇形区域内接收超声波的时间曲线,由PSD判读结果可知:该区域内坝肩属于完整状态,根据声波传播原理,该时间曲线在5 m深度处传播距离最短,因此,传播时间也最短;以5 m深度为中心,向上或向下传播距离均逐渐变长,传播时间也逐渐变长,和图4(b)所表现时间曲线形态一致。图4(c)所示时间曲线为在ZK1中以11 m为定点发射,在ZK2中以11 m为中心的扇形区域内接收超声波的时间曲线,由PSD判读结果可知:该区域内坝肩属于裂隙发育状态,根据声波传播原理,该时间曲线在5 m深度处传播距离最短,但因为裂隙发育,传播时间反而变长;以5 m深度为中心,向上或向下传播距离均逐渐变长,但传播时间却逐渐变短,图4(c)所表现时间曲线形态与图4(a)所得结论相互印证。
时间曲线的结论只能大致判断裂隙深度大致位置,并不能完整反映裂隙发育状态和规模,为更好地检测裂隙发育状况,将通过时间曲线拾取并整合初至信息。图5是利用3.1中所提及的方法进行速度反演获取的层析成像速度结构剖面,图5显示深度11 m左右出现低速异常,其速度<2 200 m/s,并贯穿钻孔涉及的整个剖面,异常发育规模不大,整体较规则,推测裂隙呈水平结构、层间发育状态,速度结构剖面分辨率较高,量化后的裂缝分辨率可达0.2 m。推测为大坝混凝土施工过程中,该深度范围内使用的混凝土粗细集料不合格,或者配合比达不到要求,导致出现水平层间裂缝。

图5 ZK1—ZK4速度层析成像成果与解释Fig.5 Result and interpretation of velocity tomography of boreholes ZK1—ZK4
此外,裂隙的深度与时间曲线反映的深度相吻合,两者可相互参考,配合解释渗漏裂缝的发育状态;除水平裂隙为低速异常外,整个速度剖面速度较均衡,速度范围2 600~3 400 m/s,与钻孔取芯波速测试结果高度吻合,进一步印证采用时间曲线获取速度结构剖面这一方法的正确性和可靠性。
图5四个钻孔,直接揭示了坝肩钻孔位置不同深度混凝土的完整性,ZK1钻孔、ZK2钻孔、ZK3钻孔、ZK4钻孔分别在深度11.2、11.3、10.5、10.8 m位置处的取芯混凝土呈现蜂窝、麻面状态,并出现混凝土碳化,与其余位置光滑完整的取芯混凝土差异较大,这一结果与速度层析结果和时间曲线也较吻合。
5 结 语
水库大坝渗漏检测中,常规的无损检测手段受场地条件限制,如高密度电法需要宽阔的场地条件,瞬变电磁法以及探地雷达需要在干扰较小的条件下进行,且其探测深度受到限制。而超声波透射技术能在较狭窄的空间内进行探测作业,其探测深度可根据钻孔深度确定,不受限制。以某水库渗漏检测为背景,引入跨孔超声波透射技术,并结合超声波透射时间曲线与速度反演进行联合解释,以较高的分辨率查明了水库大坝坝肩渗漏位置与裂隙发育规模。
分别以ZK2、ZK3号钻孔为中心,将相邻钻孔与之配对进行超声波透射,并通过PSD判别法找到临界时间值,利用临界时间值所发现的渗漏位置进行定点发射,扇形区域接收超声波,将同步超声波与定点超声波的时间曲线进行初至时间拾取与整合,利用射线追踪原理和速度层析成像获取了3个剖面联合速度结构图像。在钻孔范围内,查明了裂隙深度与发育状态,解决了重大工程难题,也为水库大坝的维护和稳定性评价提供了依据。同时,该方法为今后水库大坝渗漏检测提供了新的思路,具有较好的科学意义和推广价值。
猜你喜欢
昆明医科大学学报(2021年5期)2021-07-22
石油地质与工程(2019年4期)2019-09-10
小天使·六年级语数英综合(2018年10期)2018-10-15
电子制作(2018年17期)2018-09-28
百科知识(2018年6期)2018-04-03
中国眼镜科技杂志(2018年1期)2018-02-08
军事文摘·科学少年(2016年7期)2016-09-20
电子制作(2016年21期)2016-05-17
电影新作(2016年1期)2016-02-27
中国三峡(2013年11期)2013-11-21
