
城市水体信息光学遥感提取方法研究进展报告
2021-09-02 09:25邱士可李双权马玉凤
华中师范大学学报(自然科学版) 2021年4期
王 正,杜 军,王 超,邱士可,李双权,马玉凤
(河南省科学院地理研究所,郑州 450052)
城市水体包括城市内部的河流、小溪、泉水、湖泊、水库或人工湖泊等.城市水体是城市景观中重要的自然组分,其对城市的经济、社会、生态协调发展具有至关重要的意义[1].党的十八大以来,“绿水青山就是金山银山”的观念日益深入人心,水环境的景观美化、旅游休闲、生态环境等功能在城市景观中发挥的作用日益重要,人们对合理利用城市水环境的要求不断提高[2].然而随着城市化进程的加速,我国许多城市都存在着不同程度的水体污染、水体面积萎缩等问题[3-5].
水体空间分布及水体信息调查是进行水污染监测、水环境保护和水环境科学开发利用的基础[6].传统获取水体信息的方法依赖研究者实地测量、手工勾绘、费时费力,且不能对历史时期的水环境信息进行定量获取.传统方法虽然精度较高,但仅适用于小时空尺度的水体信息提取,其结果无法在空间和时间维大范围推广,尤其是水体的流体特性决定了水体时空变异度较大,造成传统方法难以实现大范围的实时监测和水资源水环境信息获取[7].遥感技术具有的瞬时成像、监测范围广、地物波谱信息丰富等特性可以在大时空尺度上对地物分布信息进行定性和定量监测.由于遥感具有快速、客观、大范围覆盖等优势,比较适合高时空频率的水环境水资源信息的获取和实时监测,常被用于水资源水环境评价及监测研究.
城市水体一般面积较小,提取水体需要中高分辨率的遥感数据.然而,常用的水体提取方法大都是针对中分辨率的Landsat 系列和低分辨率的MODIS影像设计的[8-14],所针对的对象也一般是湖泊或面状的开阔水域[15],较少有针对城市内小面积的线状和面状水体信息提取方法.为了对城市水体水环境进行长时间序列精细化地定点检测,开展城市区域遥感水体信息提取研究尤为重要.
1 遥感水体信息提取的基本原理
水体光谱的吸收与反射特性决定了水体对太阳光的吸收作用比陆地强.其中,清澈的水体对入射阳光能量的吸收作用较强,其在可见光-近红外波段内呈现较低的反射率,且随着波长的增加其反射率呈逐渐减小趋势(浑浊水体除外).在红外波段,水体的反射率极低(图1).纯水在蓝绿光波段范围内(480~580 nm)反射率约为5%左右;在波长为700 nm附近,其反射率约为3%左右,800 nm附近,其反射率近乎为0,几乎所有的入射能量都会被水体吸收[16].
纯水或清澈水体的遥感光谱反射率特性可表示为:蓝光波段>绿光波段>红光波段>近红外波段>中红外波段.但自然水体,尤其是陆地水体中,含有各种叶绿素、悬浮泥沙、黄色物质等,随着含量的增加,水体的光谱曲线反射峰会从蓝光波段向波长较长的红光波段移动[17].如图1所示,土壤和植被的光谱曲线在近红外波段的反射率值较高(尤其是植被),而与之截然相反的是水体在近红外波段的值极低(几乎为0).由于植被、土壤与水体在近红外波段迥异的反射率特性,在该波段影像上的水体信息由于强吸收作用而呈现黑色或较暗色调,而植被和土壤等地物由于反射特性较强而呈现出亮色调,这也是遥感水体信息提取的理论依据[16-18].
2 基于遥感手段提取水体信息的研究进展
城市水体信息的准确、快速获取是进行城市水资源调查、城市湿地保护和城市洪涝灾害评估等研究的重要前提,也是进行遥感水环境监测与评价的关键[19].基于此,许多学者在遥感水体信息精确提取上开展了大量工作,推动了遥感水体信息提取技术不断深入发展,应用范围不断扩大.
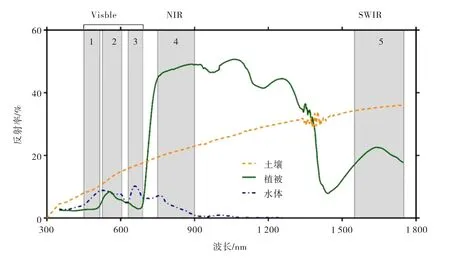
图1 常见的地物光谱特征Fig.1 Spectral characteristics of several common seen ground features
首先,目视解译法是最初广泛使用的遥感水体信息提取方法.该方法具有提取精度高的优点,但由于其存在时间效率低和成本高的缺点,因而目视解译法不适合长时间序列,大范围复杂水体的信息提取.随着计算机技术和遥感地物信息提取算法的不断发展,通过对遥感数据设置特定参数、制定一定的规则,构建特定模型等就能实现水体信息的自动分类提取,使长时间序列、大范围、复杂水体信息的提取成为可能.总体来看,基于光学遥感的水体精确自动提取方法主要可分为阈值法、分类法、深度学习法和其他方法四大类.分类法主要是利用影像分割、数据挖掘和算法规则来区分水体和其他地物在影像上的光谱差异,常用的方法包括最小距离法、最大似然法、支持向量机法、决策树法和面向对象法等[20-25].其他方法主要为综合几种方法的组合方法,如Qiao等综合了直方图自动分割法、区域生长法、NDWI法的优点,实现水体和背景信息的分离[10];车向红等人综合利用多种水体指数法、时间序列去噪法、DEM数据,消除了山体阴影、冰雪等干扰因素,实现了青藏高原的湖泊水体信息精确提取[26].
由于水体和其他地物迥异的光谱特性,决定了中高分辨率的光学遥感数据最常用的水体信息提取方法是阈值法.阈值法的基本原理是通过突出水体信息,最大程度地抑制其他地物信息,然后设定特定的阈值,来区分水体和其他地物[27].阈值法又可分为单波段阈值法、多波段阈值法和水体指数阈值法等.
多波段算法包括多波段谱间关系法、差值法和比值法.多波段算法基于不同地物在不同波段光谱信息的差异,通过构建模型或特定关系将水体与其它地物的光谱差异最大化,基于最大化光谱差异信息区分水体和其它地物.对于多波段谱间关系法,周成虎等人通过分析TM传感器数据的水体与其它地物光谱发现波段间存在TM2+TM3>TM4+TM5的关系,利用该关系能较好区分植被、土壤与水体信息.但该方法也存在一定缺陷,由于居民地建筑物同样具备该谱间关系,容易将居民地误分为水体(图2)[28-29].比值法的基本原理是,通过对水体在可见光和近红外波段光谱特性的分析,利用反射峰波段与吸收峰波段的比值运算来极大化两个波段的差距.在遥感影像上通过增强感兴趣的水体信息,最大限度地抑制其他地物信息,从而达到突出感兴趣的水体信息目的.对于差值法,吴文渊利用(TM2+TM3)-(TM4+TM5)能较好的提取研究区域的水体信息,包括河网支流和细小水体,但该方法在居民区的精度较差[30].
总体来看,多波段谱间关系法比较适用于地形起伏比较小的地区,若应用于山地区域,则需要对算法做出修正以应对该区域出现的阴影信息.值得注意的是,在地形复杂区域,尤其是在河流冲积物、裸露土地、雪冰较多的区域应用谱间关系法提取水体时也会出现一定的偏差.
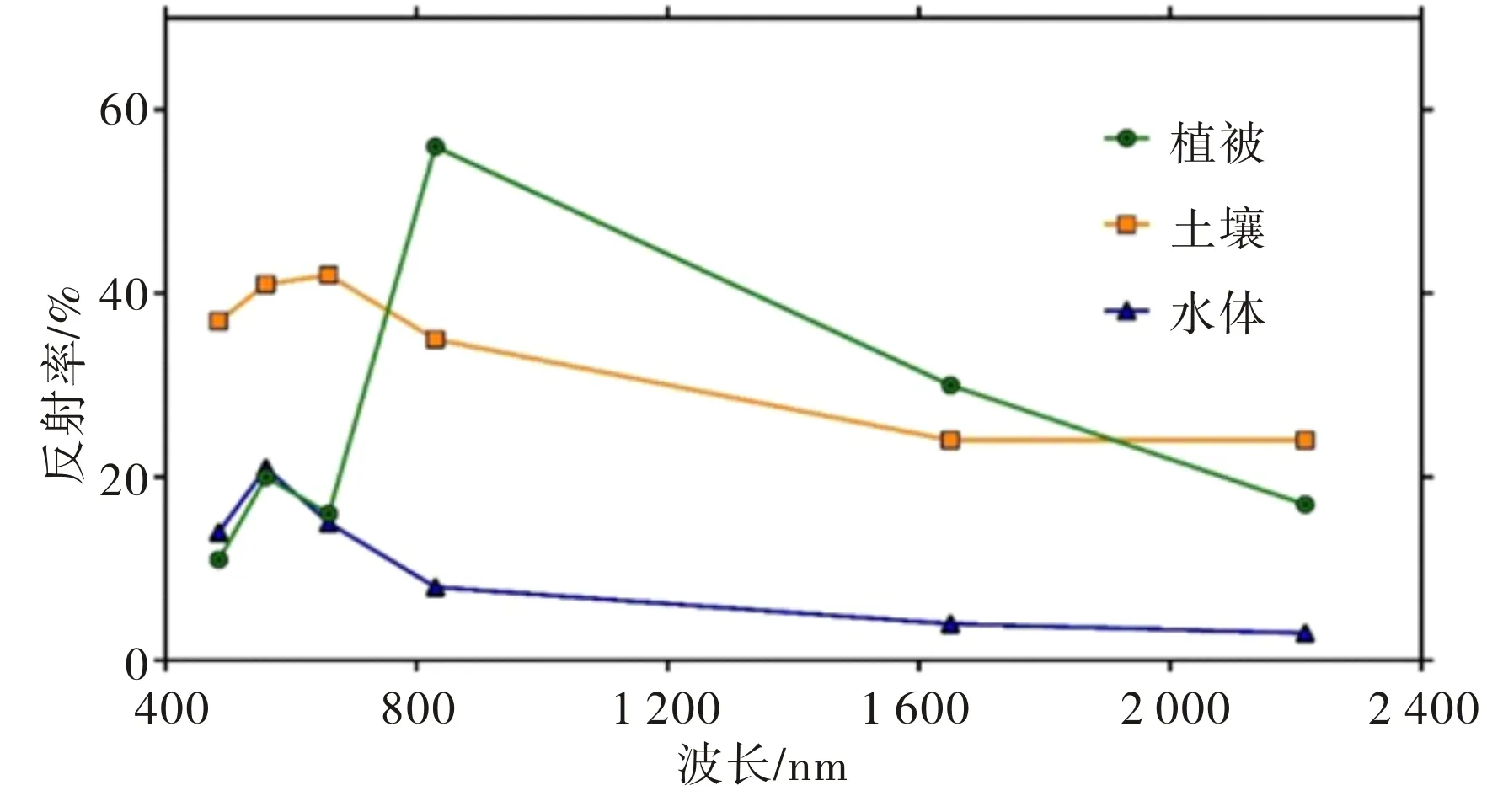
图2 建筑物及其它几种常见典型地类在TM影像上的光谱特性Fig.2 Spectral characteristics of buildings and other typical features on TM data
单波段法基于单一波段发展而来,当地物类型较丰富时,基于单波段法提取遥感影像中的水体信息具有较大的局限性;多波谱间关系法的分析过程相对复杂且无法完全抑制背景信息尤其是建筑物信息.因此,使用简便,运算效率高的水体指数法应用范围最广.水体指数阈值法的基本原理是选取对水体敏感、吸收、反射作用较强的特定波段,通过分析水体光谱之间的关系极大化水体与其它地物的差别来构建水体指数模型,并结合模型运算结果确定敏感阈值,精确提取水体信息.应用范围较广、较有代表性的水体指数模型为归一化水体指数(normalized difference water index,NDWI),NDWI是McFeeters基于绿光波段和近红外波段的典型光谱特性同时借鉴了归一化植被指数(normalized difference vegetation index,NDVI)的原理构建的[31].NDWI的计算公式为:
NDWI=(λGreen-λNIR)/(λGreen+λNIR),
(1)
其中,λGreen为绿光波段;λNIR为近红外波段.研究表明,NDWI能最大程度的突出水体信息抑制植被和土壤信息;通过实验结果表明,该指数能将水体与植被及山体阴影等信息分开.然而由图2可知,建筑物也具备与水体类似的波段特性,因此应用该指数,容易忽视建筑物的影响,NDWI并不能适应所有的实际状况.
徐涵秋通过分析建筑物的光谱特性,发现建筑物在中红外波段(对应于TM5波段)的反射率突然升高(图2),而水体在中红外波段的反射率继续变低.于是基于水体和建筑物在中红外波段的差异,针对NDWI无法有效抑制建筑物信息的缺点,利用中红外波段替换NDWI中的近红外波段构建了修正后的归一化水体指数(modified normalized difference water index,MNDWI)[32].由图2和公式(2)可知,MNDWI的分子中,MIR的值相较于NIR更低,因此MNDWI能最大化水体信息,水体的值比NDWI更大,而建筑物信息在MNDWI中的值为负,因此MNDWI能显著增强水体与建筑物之间的反差,突出水体信息,有利于准确提取水体信息[17].MNDWI的计算公式为:
MNDWI=(λGreen-λMIR)/(λGreen+λMIR),
(2)
其中,λGreen为绿光波段;λMIR为短波红外波段.MNDWI>K,K为下限阈值.MNDWI的计算过程如下例所示.首先基于MNDWI计算公式,将植被、土壤和建筑物等信息抑制,水体信息得以突出,水体与其他地物信息的区分度比较高;利用ENVI决策树分类方法,求取可以较好的分割出水体信息和其他地物信息的阈值K,K取值-0.2;图3中的Water Area图像是基于K>-0.2提取出的水体信息.
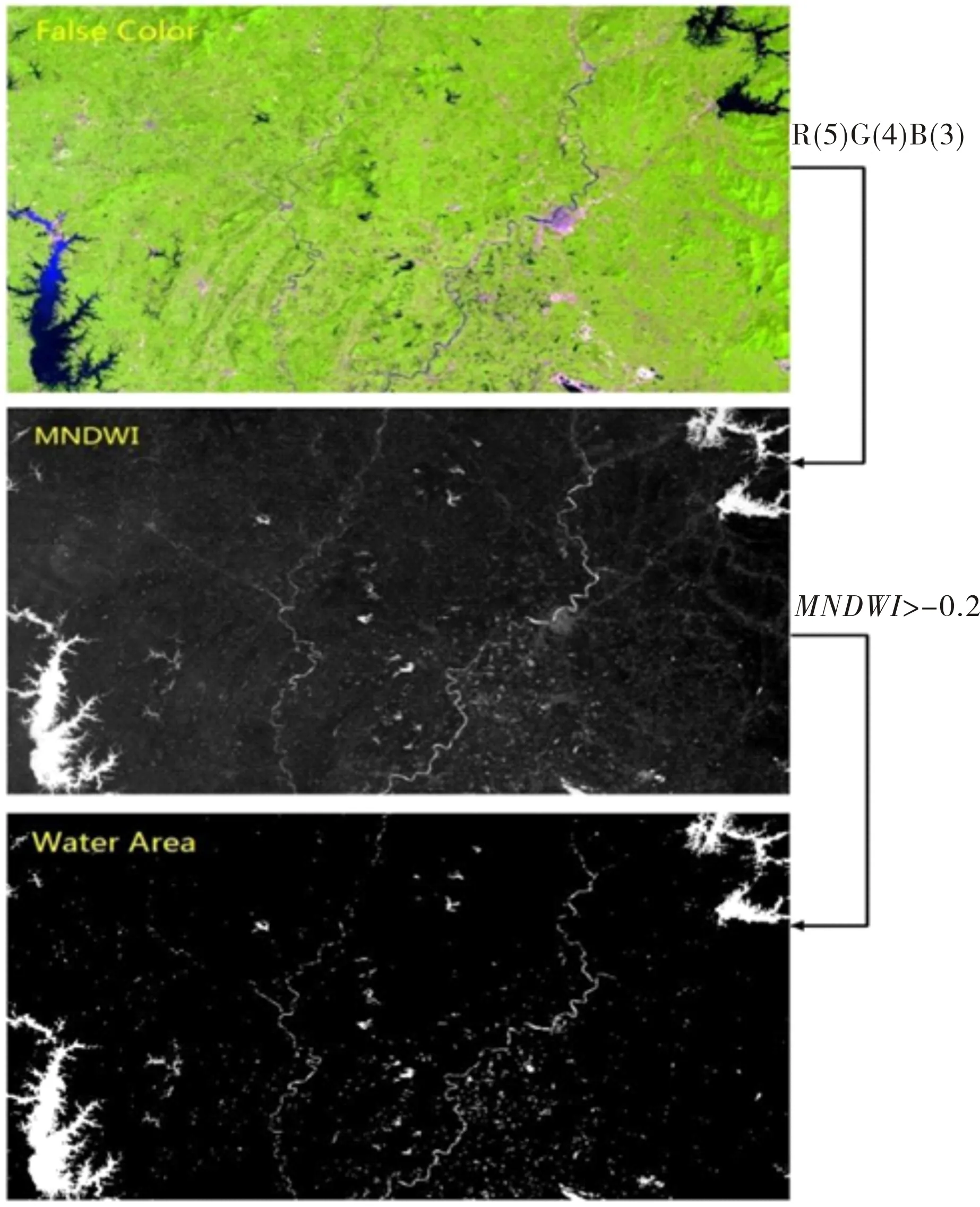
图3 基于 MNDWI的水体提取(Water Area 中白色部分即为水体)Fig.3 Water body extraction based on MNDWI (the white color in the picture ofWater Area is the water body)
研究发现Landsat卫星的短波红外-近红外-红光波段合成有助于突出水体、植被和建筑物信息[33].对比图3中的短波红外-近红外-红光波段合成的False Color 图像和图3中的Water Area 图像可发现,较大面积的湖泊、池塘等面状水体信息基本都被提取出来,以植被为背景的山间狭长的湖泊也被精确的提取出来,植被的信息得到较好的抑制.比较值得注意的是,人工地物的干扰得到了抑制.但在一些比较细的河流处,水体信息被漏提,在一些城市区域,水体信息易与建筑物信息混淆的问题未得到彻底解决.李丹等人的研究也表明,NDWI和MNDWI无法有效识别半湿润区水系的干涸、半干涸河道与背景干扰信息[34].
3 遥感水体信息提取研究中存在的问题和难点
3.1 最优阈值的选择和设定较难
常用的单波段法、多波段谱间关系法和水体指数法都需要通过设定合适的阈值来提取水体信息.对于不同的研究对象和背景信息,如何科学合理的设定阈值较为关键.然而,在大多数的研究中,阈值的选取较为主观,并且在不同的地物背景下,水体提取的阈值不一样,如何选定最优阈值或自动化提取水体,是基于遥感水体信息提取的难点、热点[35].针对城市水体最优阈值设定的问题,Feyisa等提出了一种自动水体提取指数法(automated water extraction index,AWEI),该方法相对MNDWI和最大似然法提取的水体信息,精度有了显著的提高,但该方法针对Landsat 影像设计的,利用了两个近红外波段,限制了该方法在一些较高分辨率但不具备近红外波段的遥感影像的使用.此外该方法在城市区域高亮地表和屋顶,也容易错分.如何基于该方法,增强其适用性,区分干扰信息,有待进一步研究.
3.2 普适性的水体信息提取方法缺乏
一些多波段谱间关系法、水体指数法基于可见光至短波红外波段的遥感影像构建的.然而,常用的高分辨率遥感影像,比如ZY-3、WorldView-2等仅包含可见光近红外波段,无法利用短波红外波段构建水体指数法和多波段谱间关系法提取水体信息,更多的是采用综合光谱、形状、和纹理等信息的支持向量机(support vector machine,SVM)、决策树法和面向对象法[36].虽然SVM法的分类精度较高,但其水体信息分类提取的精确度依赖于样本的选择;利用决策树法提取水体信息能较好的排除冰雪和薄云信息的干扰,然而利用决策树法无法有效消除阴影的影响;面向对象法提取水体信息依赖于分割阈值和分类规则,然而分割阈值和分类规则的制定较为主观[37].如何构建普适性的水体提取算法,是未来研究的重点.
3.3 细小水体提取较困难
常用的水体信息提取方法对湖泊、水库等面状水体信息以及较宽河流的提取研究较多,水体信息提取结果也较好[38].但对城市和郊外细小水体的研究尚显不足,一方面,细小水体容易受到阴影和云的影响,较难区分;另一方面,细小水体在一些中低分辨率的遥感影像上无法有效识别,尤其是当河流或水体信息小于中低分辨率遥感影像像元的空间分辨率时,在遥感影像上容易出现单个像元既包含水体信息又包含背景信息的混合像元,因此细小水体信息信号微弱,易被忽略.Lin等利用Landsat影像结合多源辅助数据通过回归分析方法对MODIS的混合像元进行分解,取得了较好的效果[39].在城市区域,基于该混合像元分解思想,如何利用辅助数据和其他辅助信息从遥感影像中提取细小水体信息是未来研究需要解决的.
3.4 城市水体提取面临的干扰信息较多
城市区域,人工建筑物信息是主导的背景信息.在非城市区域,常用的阈值法、多波段谱间关系法、水体指数法对建筑物信息的抑制较为一般(MNDWI尚可),但在城市区域,由于建筑物反射信号较强,水体反射信号较弱,水体信号的提取受到大面积背景建筑物信息的强烈干扰,城市区域水体的提取较为困难,挑战较为巨大.
3.5 城市区域水体的自动化提取研究较少
对于野外地区面状和线状的水体信息自动化提取研究较多,但是对于城市区域的水体自动化提取研究较少.常用的方法中,大多针对特定的研究区域和特定的地形条件,缺乏在不同的地形条件下都可以使用的普适性方法.此外,在水体信息提取过程中,常用方法依赖于经验知识和人为主观判断,不适用于需要人工干预较少、方便高效的应急处理.如何实现城市区域水体的连续自动化提取是要思考的重要问题[15].
3.6 城市区域水体受地物阴影干扰较多
水体提取研究时,水体信息易与山体阴影、云阴影等较暗地物的光谱信息混淆.城市区域水体信息一般较为破碎和分散,城市区域的水体信息提取研究,往往依赖较高空间分辨率的遥感影像,此时城市建筑物阴影信息容易与水体信息相混淆,严重影响了遥感影像的解译.如何解译出城市建筑物的阴影,准确区分阴影与水体信息,非常必要.
3.7 城市黑臭水体遥感提取较为困难
城市地表水体如河流、湖泊、水库、池塘等对城市生态系统服务和当地小气候具有重要影响[40].由于城市生产生活集中,频繁的人类活动可能会导致水质恶化,变得浑浊、发臭或发黑,也即黑臭水体.城市黑臭水体的成因主要是由于人类向水体中过度排放富含氮、磷等营养物质的污水加上城市水体的水循环动力条件不足导致水体中藻类和细菌的大量繁殖和新陈代谢引起的[41].城市黑臭水体在视觉和嗅觉上呈现较差的感官体验,影响了城市环境质量和人民生活.由于城市黑臭水体分布具有季节性、分散性和区域性的变异特征,利用地面监测手段难以快速获取大范围黑臭水体现状,利用遥感手段辅助城市黑臭水体识别与整治具有大范围、快速等优势,但遥感手段在黑臭水体提取方面的应用尚未成熟[42].准确地测绘城市黑臭水体对城市规划和水环境治理和防治至关重要.
4 城市遥感水体信息提取未来的研究方向及建议
研究基于遥感的常用水体信息提取方法,分析其存在的问题及优势,揭示基于遥感的城市水体/水环境信息提取的关键难点和突破路径.
4.1 适应于城市区域的水体信息提取方法研究
文献综述发现,基于遥感的水体信息提取研究存在城市区域集中连片的建筑物信息较强,而水体信号较弱,且水体信号常被建筑物信号影响的问题.许多在其他区域和其他情形表现较好的方法,将其应用到城市区域的水体信息提取中时,往往表现不佳.
针对该问题,通过对多源、多时相遥感数据融合提取,高光谱影像,结合其他高分辨率卫星数据,开发新的、适用于城市区域的水体提取方法.通过敏感波段的典型特性,有效抑制建筑物的干扰信息,提取出水体信息,实现适应于城市区域的水体信息提取方法构建,并对方法进行定性与定量评价,进而将该方法扩展至其他区域在应用中进一步的评价和验证方法.
4.2 城市细小水体信息的提取
城市区域,人类生产生活活动密集,一般水体面积比较小,且干扰信息较多,提取水体信息需要使用中高分辨率的遥感数据.然而,常用的水体提取方法大都是针对中分辨率的Landsat 系列和中低分辨率的MODIS设计的,针对城市区域面积较小的线状和面状水体信息提取方法的研究尚显不足[43-46].
针对该问题,建议通过数据融合的方法,将感兴趣数据融合,提高其空间分辨率和波段分辨率,来为城市细小水体提取足够的空间分辨率,以及足够的谱段信息,以备构建城市细小水体提取方法之用.
4.3 城市黑臭水体识别
利用遥感手段监测城市黑臭水体的应用技术手段尚未成熟,遥感探测黑臭水体的方法与模型尚处于探索阶段,方法与模型的构建多基于对黑臭水体图像特征及光谱特征的分析上[47].国内学者的早期研究多集中在基于对水质参数的定量反演来判别水体是否为黑臭水体及其程度,国外学者的研究主要针对黑臭水体的评价方法和形成机理方面[47-48].
未来研究,应进一步深刻理解和把握黑臭水体的内涵,注意将国内常用的单一化学指标评价法与国外流行的非线性回归模型评价法结合,将原型观测与模型构建等基础研究作为黑臭水体识别的重中之重.
4.4 水体信息与云阴影、建筑物阴影交叠的遥感识别研究较少
建筑物阴影、云阴影、山体阴影与水体光谱特性相似,因此最易与水体信息相混淆,有效的区分水体与阴影对于城市水体信息的精确提取具有重要意义[49].国内外的研究主要集中在对云阴影、山体阴影、建筑物阴影的准确提取上[50-55].然而对水体与云阴影、建筑物阴影交叠的情况考虑较少,这种问题在城市区域更为严重,缺乏一种普适的、有效率的方法来区分城市水体与建筑物阴影信息.
未来研究应重点关注水体信息与云阴影、建筑物阴影交叠部分的精确识别与提取.随着多源遥感数据的不断增加,该方法应具备较好的多源数据扩展性、简便易行效率高.
5 城市水体信息提取研究中的关键科学问题
5.1 建筑物干扰信息的去除
光学遥感常用的谱间关系法、比值法、差值法和水体指数法,都是利用水体在近红外或中红外波段强吸收的特点来提取水体.然而,由图2可知,建筑物也具备此类特点,因此,常用的方法往往无法彻底抑制建筑物信息.建筑物信息提取的精确与否,决定着城市水体提取算法的成败.
5.2 数据融合提高数据的空间分辨率和波谱分辨率
一方面,细小水体在中低分辨率遥感影像上易出现混合像元问题;另一方面,高分辨率遥感影像一般只有蓝、绿、红、近红外四个波段,缺少对建筑物信息比较敏感的中红外,短波红外,远红外波段.针对该问题,多源遥感信息融合是一种有效手段[56-57].有待构建一种新的数据融合方法,将谱段信息丰富但全色波段与多光谱波段融合后只有15 m分辨率的Landsat 8 OLI影像与空间高分辨率高,但一般波段较少(一般只有四个波段:蓝、绿、红、近红外波段信息)、波谱信息不丰富的高分辨率遥感影像进行融合,融合为波段分辨率高、空间分辨率高的遥感影像数据库.
5.3 不依赖于阈值的水体提取法
无论是最初的单波段法、多波段关系法还是水体指数法都离不开分割阈值的设定,阈值设置的主观性以及随机性限制了业务化自动化水体提取方法的发展.有待构建一种不依赖于阈值的自动化水体信息提取方法,增大凸显水体信息、抑制建筑物、植被、土壤等信息来增大水体与其它背景地物间的总区分度,然后通过自动聚类分割,实现不依赖于阈值设定的水体信息提取法的构建.日本学者大津(Nobuyuki Otsu)针对图像最优阈值分割的问题提出了最大类间方差法(又叫大津法)[58].该方法将遥感影像分成背景和目标两部分,然后计算最佳阈值来区分这两类像元,使得两类像元的区分度最大[59].该方法计算简单、效率较高、不受图像亮度和对比度的影响,但该方法对图像敏感,只能针对单一目标分割,当遥感影像中目标与背景信息的面积相差很大时,分割效果不佳,难以确定较好的阈值,尤其是在城市区域,背景信息复杂,城市水体面积与背景信息面积悬殊,应用该方法效果不佳.因此,在实际应用中,多将大津法与其他方法结合起来使用,这也是今后要努力的一个方向[60-61].
5.4 多源数据融合的黑臭水体识别模型的构建
城市黑臭水体的成因较为复杂,一方面点源污染、面源污染和河流底质再悬浮为黑臭水体的形成提供了营养基础,另一方面,城市水体水动力学条件不足、水循环不畅为黑臭水体形成提供了环境条件,在这两个因素共同基础上,在理化因素作用下,形成了黑臭水体.南北方、不同区域的点源污染、面源污染和底质情况不同;不同季节的黑臭水体形成机理也不同[62].因此,仅利用单一光谱指标、理化指标无法有效完成有效黑臭水体遥感识别模型的构建,应综合遥感光谱、水动力模型、生态化学性质等多参数多学科,构建综合模型来有效识别黑臭水体[63].
5.5 基于光谱、纹理特征等多方法融合的阴影与水体的区分
城市水体信息的精确提取对于城市规划、城市生态环境等管理至关重要,然而城市水体信息与建筑物、云阴影的相似光谱特性严重影响了城市水域信息提取的精度,单纯依赖光谱特征或某种单一方法无法有效彻底去除阴影,区分水体信息与阴影信息,还需结合其他方法,综合利用多方法组合的优势、避免各自的缺点,以构建多方法融合的建筑物阴影与水体信息的区分方法[64].
Feyisa等基于Landsat 多光谱传感器的蓝、绿、红、和两个近红外波段,构建的AWEI法根据是否有建筑物阴影与水体信息相交叠分为有阴影(AWEIsh)和无阴影(AWEInsh)两种情况,取得了较好的城市水体提取精度效果[9].有鉴于此,Wu等人提出了一种城市水体提取方法TSUWI(two-step urban water index ,TSUWI),该方法将TSUWI方法分为两个部分,分别为无阴影时的UWI(urban water index,UWI)和有阴影的USI(urban shadow index,USI),这两个指数结合光谱分析与支持向量机方法,取得了较好的提取精度[40].Feyis和Wu提出的方法在冰雪覆盖、较亮屋顶干扰时易将冰雪及屋顶信息误分为水体,且该方法选用的多波段信息对该方法的扩展性有一定的限制,但这些方法的思路为精确区分城市水体与阴影信息提供了重要的借鉴和参考.
6 结论
本文针对城市水体信息遥感提取的问题,研究了国内外城市水体信息提取方法研究的文献;简要介绍了遥感水体信息提取的基本原理,综述了基于遥感手段提取水体信息方法的研究进展,揭示了城市水体信息遥感提取研究中存在的问题和难点,指明了城市水体信息遥感提取的研究方向和其中的关键科学问题.
城市水体信息具有水体面积破碎、建筑物及阴影混分、水质较差且水体组分复杂、水体面积波动较小等问题.随着遥感技术的不断发展,发展城市水体信息提取的多指数集成方法、非地形阴影识别、建筑物的区分、亚像元分解、影像融合、多时相提取等方法及高光谱影像的应用,是今后应重点努力的方向.
致谢:感谢中国科学院合肥物质科学研究院和中国科学院安徽光学精密机械研究所提供的典型目标/背景/大气光学特性数据库.该光谱特性数据和大气特性数据库主要包括人工目标、土壤、植被、岩矿、水体等目标/背景光谱特性数据和典型地区的气象、大气气溶胶光学厚度等信息,本文使用了其中实测的植被、土壤和水体数据.
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
九江学院学报(自然科学版)(2022年2期)2022-07-02
航天返回与遥感(2022年2期)2022-05-12
黑龙江大学自然科学学报(2022年1期)2022-03-29
波谱学杂志(2022年1期)2022-03-15
太阳能(2022年1期)2022-03-05
华北理工大学学报(自然科学版)(2021年3期)2021-07-03
文苑(2020年11期)2020-11-19
中国诗歌(2019年6期)2019-11-15
数学大王·中高年级(2016年4期)2016-05-14
