舰载雷达鉴定试验数据处理关键问题分析
2021-09-01 09:33王琦,周刚
海军航空大学学报 2021年1期
王 琦,周 刚
(1. 92941部队,辽宁葫芦岛 125001;2.海军航空大学,山东烟台 264001)
舰载雷达鉴定试验包含雷达威力、雷达精度、雷达分辨率和抗干扰等试验项目。试验主要依据雷达的指标、雷达测量数据特征及具备的基本条件等,在接近实战条件下的外场进行。试验方法为:被鉴定的雷达与测控设备,按事先确定的位置布站,并在各自引导设备的引导下进行搜索、捕捉和跟踪目标,在同步信号(一般为GPS)的控制下,按设计好的录取间隔时间和数据总量,同步、连续的对目标进行测量和数据录取,并将测得的目标瞬时数据,按制定好的数据处理方案进行处理。再根据数据处理的结果和雷达的性能指标,对雷达的威力、精度、分辨力和抗干扰性能进行评判。
1 关键问题梳理
从上述舰载雷达鉴定试验过程可以看出,为了对雷达的性能作出可信度高的评判,数据处理是关键,只有因素考虑全面、模型建立正确,才能获得高精度的数据,进而实现对雷达的可靠评判。
舰载雷达数据处理软件模块,主要分为数据预处理模块和数据统计处理模块,见图1。其中,数据预处理模块是对获取的真值数据进行预处理,使其在精度、数据率和坐标形式上均满足统计处理的要求,是数据统计处理模块的基础。
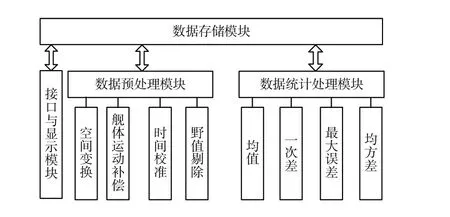
图1 数据处理软件模块结构图Fig.1 Structure diagram of data processing software module
获取真值数据的方法较多。目前,在雷达试验中常用到GPS 载波相位差分定位技术和雷达测控技术。下面,对这2种方式获得的真值在进行数据处理中的关键问题进行分析。
GPS 载波相位差分定位技术的测量精度可以达到厘米级,是全天候测量技术,也是雷达精度试验中真值测量系统的首选。其中,1 个GPS 设备加装在靶标上,另1个放在舰载雷达附近(GPS坐标中心须转换到舰载雷达天线回转中心)。因此,可根据2个GPS测得的经度、纬度、高度,计算出靶标相对舰载雷达的方位角、俯仰角和距离。舰载雷达输出的靶标测量值数据是已经过舰体运动参数补偿的,因而也须要对GPS测得的靶标真值进行载舰横摇、纵摇和航向的补偿,再将补偿后的数据进行时间插值运算,得到的结果为测量真值。该真值与舰载雷达的测量值进行数据统计运算,得出雷达是否满足指标的结论。由上述数据分析处理可知,利用GPS作为真值最关键的预处理环节是空间变换、舰体运动补偿、时间校准和野值剔除。
利用测控雷达作为真值测量系统,是将测控雷达测得的靶标飞行数据转换到舰载雷达所在的坐标系进行比对,同样须进行空间坐标变换、舰体运动参数补偿及时间校准3 个预处理环节。须特别说明的是,由于目前测控雷达精度不高,其精度误差经坐标转换后会放大。放大后的数据精度能否满足舰载雷达对真值的要求、是否可作为真值直接计算,还须建立精度计算模型仿真后才能确定。
本文主要针对数据处理中的空间变换、舰体运动参数补偿、时间校准3个关键问题进行分析、建模与仿真。的目标坐标(以探测雷达中心为坐标原点的极坐标)转换到舰载雷达回转中心的测量坐标系下。
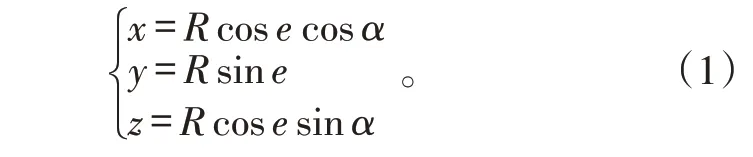
首先,将测控雷达的极坐标测量值转换为各观测站点的直角坐标:
2 数据处理模型建立
2.1 空间一致性模型
1)测控雷达到舰载雷达空间坐标转换模型。雷达试验中将测控雷达作为真值时,须将测控雷达探测
式(1)中:R
、e
、α
分别为测控雷达测量的目标距离、方位角、俯仰角。其次,将测控雷达的直角坐标系转换到地球坐标系:


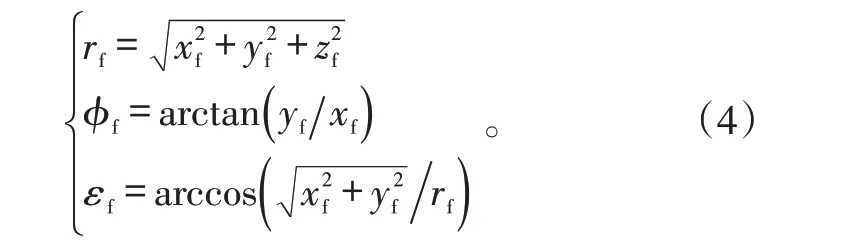
最后,得到在舰载武器系统测量系统坐标系下的极坐标:
2)GPS 真值到舰载雷达空间坐标转换模型。雷达试验中GPS作为真值时,须将其转换到舰载雷达回转中心的测量坐标系下。
首先,将靶标的GPS坐标转换到地球坐标系。

j
、ω
、h
分别为靶标的地理经度、纬度和海拔高度;R
、δ
、μ
意义与式(2)相同。后续坐标转化方法与式(3)(4)一致。
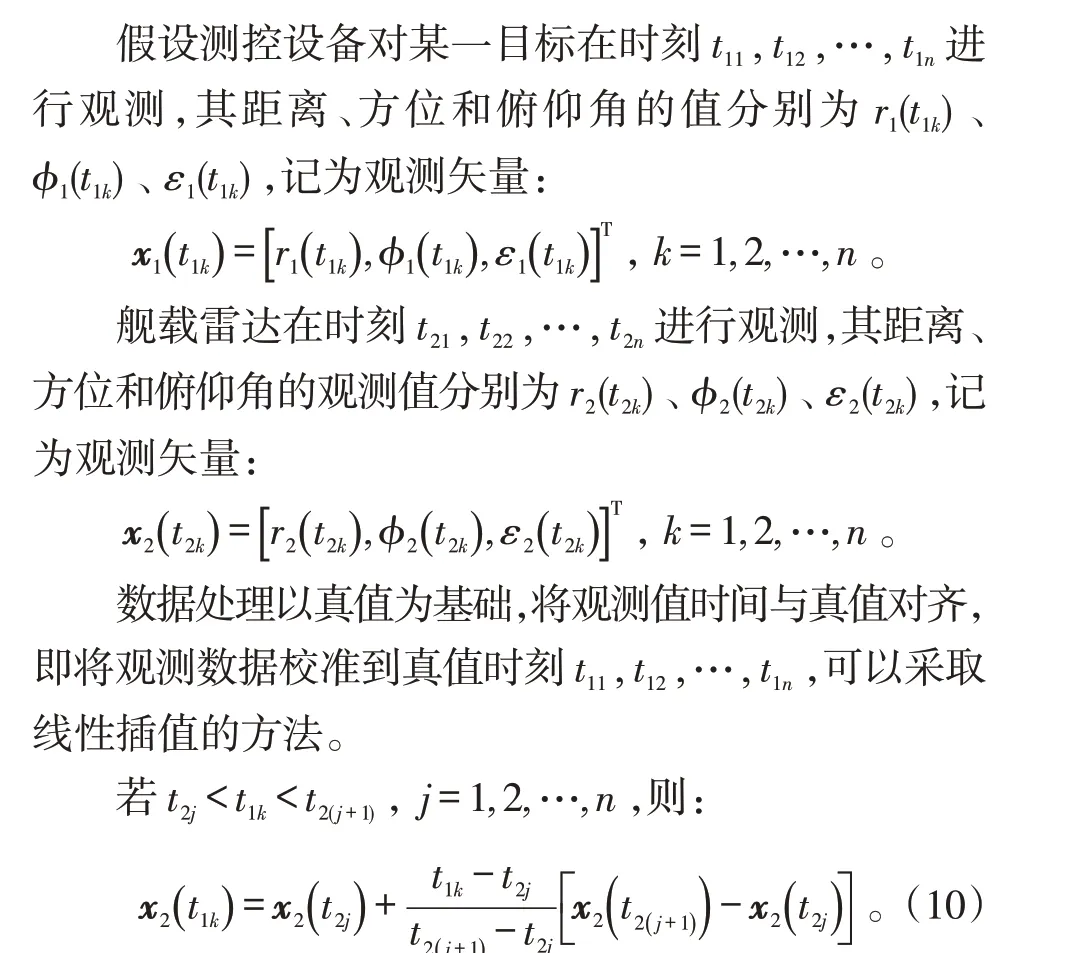
2.2 舰体运动补偿模型
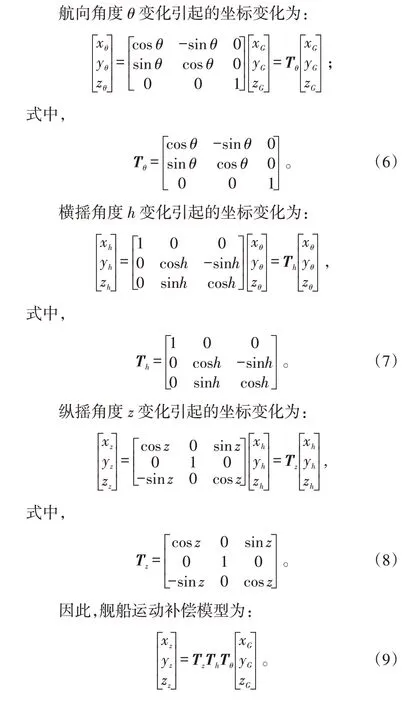
舰船的运动姿态数据是由舰上平台罗经测得的。平台罗经测量舰船水平姿态时是按照先横摇、再纵摇的顺序进行的。因此,由GPS 大地坐标系到舰船坐标系的转换也应该是先进行横摇转换,再进行纵摇转换。由于航向角的测量也是在水平面进行的,由大地坐标系到舰船坐标系的转换只能按照“航向—横摇—纵摇”的顺序进行转换。
设GPS 地球坐标系的Z
为竖轴、X
轴为横轴,Y
为纵轴。Z
轴与X
轴、Y
轴构成垂直面,舰船航向(艏摇)以Z
轴为中心进行角度旋转;舰船横摇以X
轴为中心进行角度旋转;舰船纵摇以Y
轴为中心进行角度旋转,分别见图2 a)、图2 b)、图2 c)。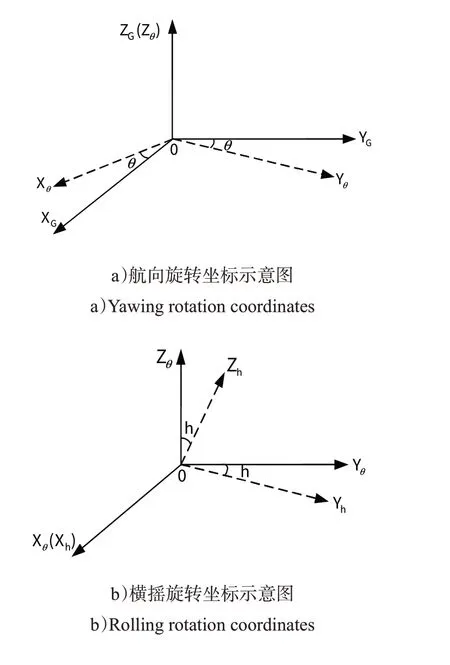
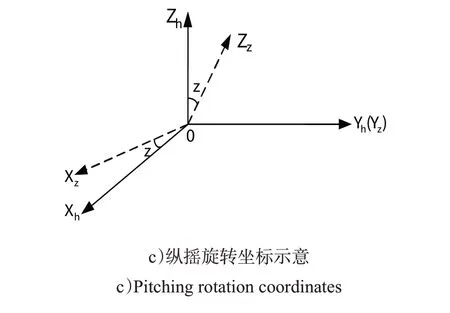
图2 舰体运动补偿示意图Fig.2 Schematic diagram of motion compensation of ship
2.3 时间校准模型
测控设备录取时刻与周期和舰载雷达探测均不同,因而数据处理的关键就是将真值与测量值的数据校准到同一参考时间,即进行时间校准。
3 实例计算
开展舰载雷达鉴定试验,以测控雷达录取数据作为真值,开展数据处理工作。
目标在航路上飞行数分钟,GPS录取频率10 Hz,共录取2 000 组数据,舰载雷达同步测量数据200 组,舰船同步测量运动姿态数据75组。
数据处理时,首先将靶机GPS位置数据转换成以舰船雷达回转中心为原点的直角坐标数据。
然后,将舰船姿态测量数据75 组(航向、横摇、纵摇)以真值时间为基准进行校准插值为2 000 组数据,将靶机直角坐标数据进行舰体运动补偿后,将其转换成极坐标。
最后,将舰载雷达200 组测量数据以真值时间为基准进行校准插值为2 000 组数据,与真值相比较再进行数据统计运算。
运算结果如图3~7所示。
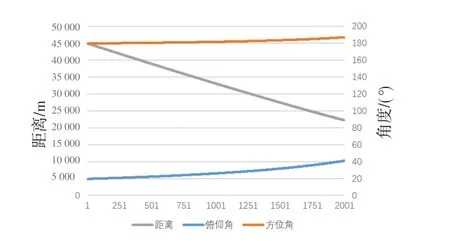
图3 目标真值(以舰船雷达回转中心为坐标原点)Fig.3 Target truth-value data(Origin of the coordinate is the center of ship radar rotation)
根据一次差数据,算出舰载雷达的最大误差,与其指标相比较,该雷达指标合格。
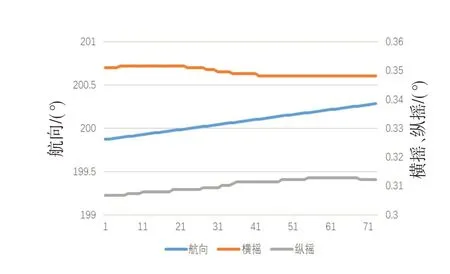
图4 舰船运动姿态Fig.4 Ship motion attitude
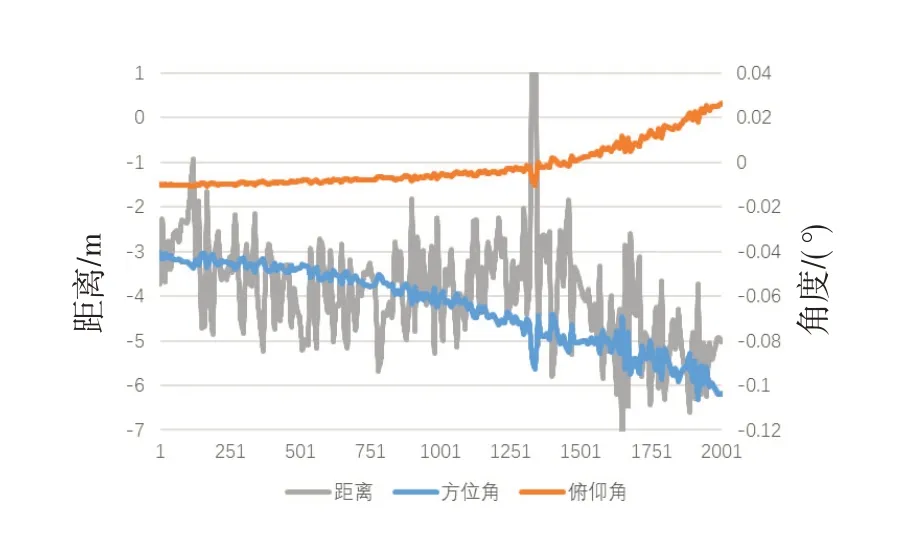
图5 舰船姿态补偿后真值数据的变化Fig.5 Change of truth-value data after ship motion attitude compensation
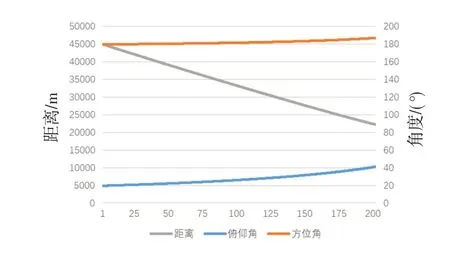
图6 雷达测量数据Fig.6 Radar measurement data
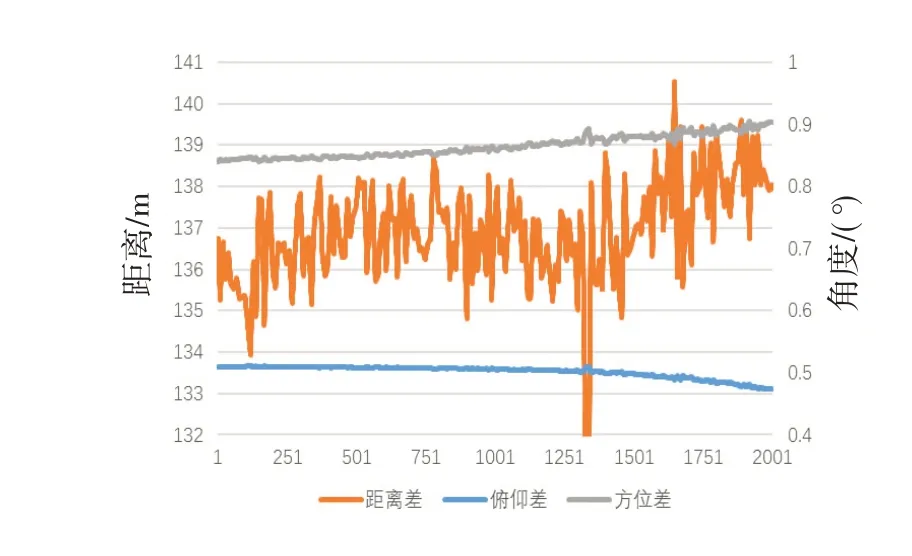
图7 真值与测量值的一次差Fig.7 Single difference between truth-value data and measured data
4 结论
本文针对舰载雷达鉴定试验的需求,通过对试验流程的分析,确定了影响试验评估的数据处理环节的关键技术点。关键技术点,即舰体运动补偿、时间校准、空间变换等。根据试验的处理要求开展了建模工作。该模型考虑因素全面,处理精度高,可用于以GPS 载波相位差分定位技术或雷达测控技术等不同来源的真值数据的处理,也适用于陆基雷达鉴定试验,对雷达鉴定试验的结果评估工作具有重要意义和指导作用。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
舰船科学技术(2022年10期)2022-06-17
中国信息化(2022年4期)2022-05-06
语数外学习·高中版中旬(2021年11期)2021-02-14
考试周刊(2018年15期)2018-01-21
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
中学生数理化·高二版(2016年5期)2016-05-14
环球时报(2009-09-16)2009-09-16