“嫦娥五号”任务再入返回段测控布站区域确定方法
2021-08-29 06:05:44李海涛陈少伍
深空探测学报 2021年3期
李海涛,陈少伍,李 赞,樊 敏,程 承
(北京跟踪与通信技术研究所,北京 100094)
引 言
探测器返回技术是空间探测中的一项重要关键技术,已成功应用于近地空间科学研究、载人航天工程及月球和深空探测任务。我国已经成功实施了多次返回式卫星任务[1],载人航天工程也完成了多次无人和载人返回,返回舱成功返回地面[2-3]。在我国月球探测工程中,“嫦娥五号”(Chang'E-5,CE-5)再入返回飞行试验任务圆满完成了我国探测器首次从月球轨道再入返回地球[4-5]。该技术可用于后续载人登月任务中,实现月球样品及航天员安全返回至地面[6-7]。
再入返回过程中,地面测控网承担着返回器再入返回段的天地通信、跟踪测控及落点预报等任务。为了保证地面能够正常跟踪并满足跟踪测量弧段要求、保证任务安全及搜索救援,测控系统在总体设计阶段必须根据返回器的飞行状态,综合考虑地面站能力,在适当的位置合理布设地面站[8-11]。
对于月球返回任务,不同的月地转移入射窗口对应不同的返回弹道,因此需要针对不同返回窗口的返回弹道,确定测站的位置,以保证返回器正常返回地面指定区域。固定测控站的选取、活动测控站或测量船的点位布设等均需要满足多天窗口的测控需求。为此,需要根据多天返回飞行弹道,确定满足对多天返回弹道均可见的测控站分布区域,从而为测控站的选取、活动测控站或测量船的位置布设提供依据[8-9,12]。此外,若飞行过程中的实际飞行与理论飞行弹道存在较大偏差,根据理论飞行弹道布设的测站可能无法完成返回器跟踪测量,此时需要根据实际飞行弹道快速确定对返回器可见的地面测站分布区域,在上述区域内确定可用的地面测控站,及时调配测控资源,确保应急情况下返回器的实时准确跟踪。以往的返回任务中,通常在返回弹道的星下点附近布设测站,形成接力式测量链,完成返回器测控。这一方法仅采用星下点来确定测站位置,未能建立测站分布位置于返回器弹道的直接关系。
本文以“嫦娥五号”任务再入返回段为背景,针对再入返回中多窗口测站位置选取和应急测控资源调配问题,提出了一种对返回器可见的测站分布区域的具体确定方法,通过建立测站对返回器可见的模型,建立满足要求的测站布设区域的函数,并结合“嫦娥五号”任务的实际情况,开展两种典型场景下的分析工作。给出了再入返回过程中地面测站分布区域确定的方法及实现,并对该方法的后续应用进行展望。
1 “嫦娥五号”月球采样返回任务概况
2020年11月24日4时30分,“长征五号”(CZ-5)火箭将“嫦娥五号”探测器发射至地月转移轨道,经过地月转移、近月制动、环月飞行,于12月1日23时11分成功着陆月球正面,月面样品采集、封装工作完成后,经月面上升、交会对接、环月等待、月地转移段飞行,于12月17日1时12分,在距地球约5 000 km高度处返回器与轨道器分离;返回器经半弹道跳跃二次再入方式进入大气层,返回到内蒙古四子王旗着陆场。
再入返回段的飞行过程如图1所示。轨返组合体从月球直接返回地球,飞行至大西洋上空距离地面高度约5 000 km处,返回器与轨道器分离,以半弹道跳跃的方式再入返回。经过一段时间飞行后,在印度洋上空,返回器以第二宇宙速度进入大气层,启动第一次减速。下降至预定高度后,返回器向上跃起,跳出大气层,到达跳出最高点后开始逐渐下降。从西藏进入国境后,返回器再次进入大气层,启动二次减速。在距地面约10 km高度时,返回器降落伞开伞,最后着陆于四子王旗着陆场[5,13]。
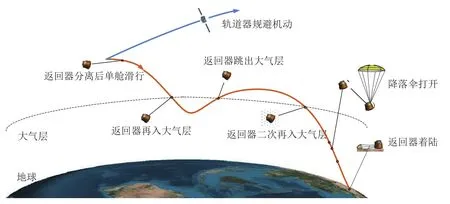
图1 “嫦娥五号”任务再入返回过程示意图[14]Fig.1 The overview of the reentry flight process of CE-5[14]
2 测站对返回器几何可见模型
2.1 对返回器可见测站区域模型
建立空间直角坐标系下地面站与返回器的位置关系。假设地面站在地球表面的位置为G,返回器的空间位置为S,测站对返回器跟踪时的仰角为θ。两者之间的相对位置关系如图2所示。
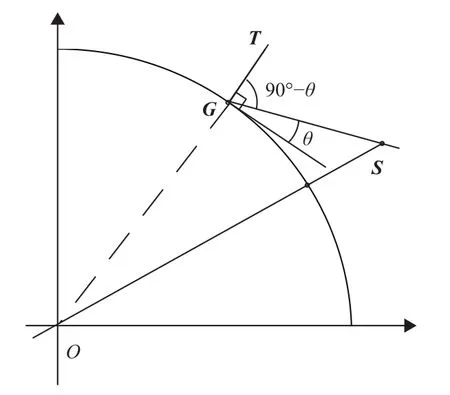
图2 测站与返回器位置关系Fig.2 The position between ground station and reentry module
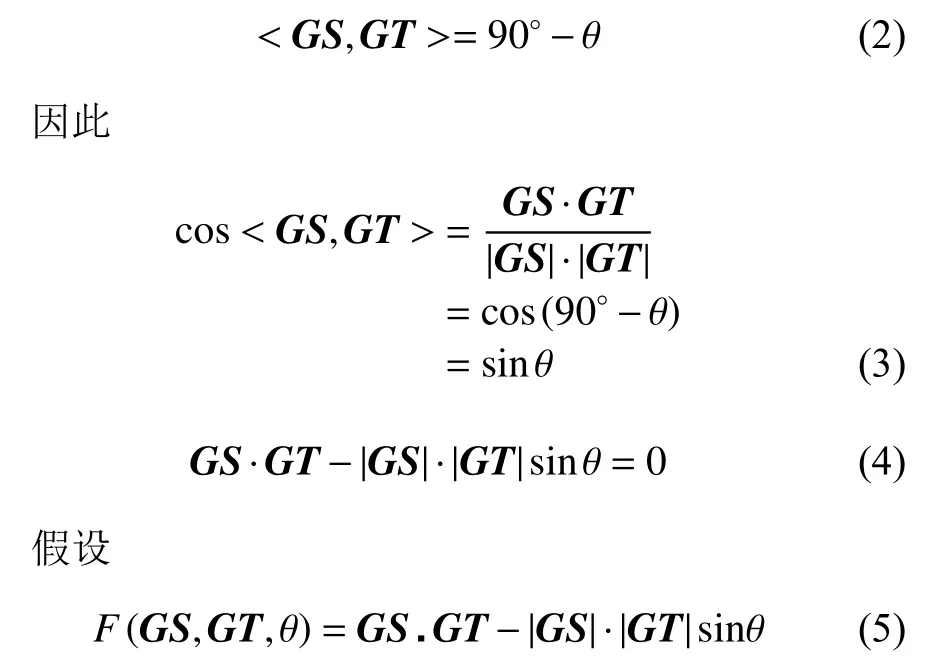
假设地球为标准椭球,在地心固连坐标系下,测站位置向量可以表示为OG,返回器位置向量可以表示为OS。测站到返回器的向量GS可以表示为

根据图2可知,测站到返回器的向量GS与过测站的切平面之间的夹角为θ[15]。对这一问题进行转化,假设过测站的切平面的法向量为GT,GT与过测站的切平面垂直,因此测站到返回器的向量GS与测站的切平面的法向量GT的夹角为90°−θ。
根据返回器与地面站相对位置关系为
假设测站工作的最低仰角为θ0,当地面站正常工作时θ≥θ0,此时

因此,满足F(GS,GT,θ0)≥0的测站位置G能够满足工作仰角大于等于θ0。若地面站正常工作θ<θ0,F(GS,GT,θ0)<0,此时测站位置G不满足最低工作仰角条件。
假设赤道半径为aE,扁率为e。对于地面测站,通常采用大地坐标进行描述,其位置为[L1,B1,H1],L1为测站大地经度,B1为测站大地纬度,测站位于标准椭球面其高度H1为0。
测站位置向量用直角坐标表示为OG=[X1,Y1,Z1],根据大地坐标与直角坐标之间的转换关系可知
在直角坐标系下,地面测站的直角坐标[X1,Y1,Z1]满足方程

过该点的法向量GT可以表示为

返回器位置通常采用球坐标进行描述,其位置为[α2,δ2,R2],α2为返回器地心矢量在赤道面投影与X轴方向的夹角,Δ2为返回器地心矢量与赤道面的夹角,R2为返回器地心距离。
返回器的直角坐标位置OS=[X2,Y2,Z2],用[α2,δ2,R2]表示为
测站到返回器的向量GS,其可以表示为
将式(10)~(12)代入式(6)进行简化,式(6)可以表示为

因此满足θ≥θ0的测站其位置组成的集合可以记为

而不能满足θ≥θ0的测站其位置组成的集合可以记为

结合返回器位置进行简单的分析,假设测站最低工作仰角θ0=5°,某一时刻返回器的位置为[α2,δ2,R2]=[39.73°,102.49°,6 439.35 km]。根据上述公式,获得工作仰角≥5°的测站位置集合Qθ≥θ0,如图3所示,满足上述条件的(L1,B1)是一条以返回器当前时刻星下点为中心的近似圆的闭合曲线。
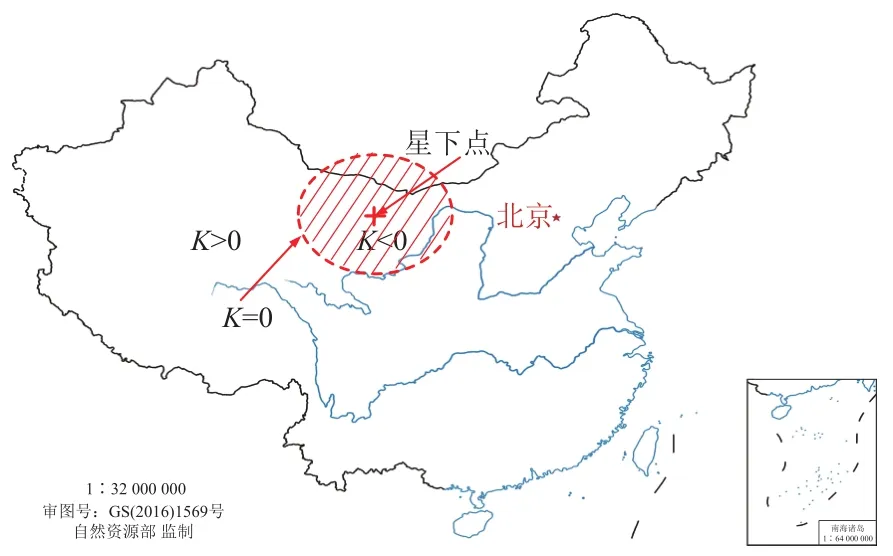
图3 对某一位置返回器可见的测站区域Fig.3 The Ground station visible region for reentry module in certain position
根据图3可知,K= 0时,测站位于闭合曲线上,测站工作仰角等于5°;K>0时,测站位于闭合曲线内部,测站工作仰角>5°;K<0时,测站位于闭合曲线外部,测站工作仰角<5°。
2.2 飞行过程可见测站区域
在再入过程中,返回器位置连续变化,由此形成地面测站分布区域也不断变化,上述连续时间段内测站位置分布的区域组合,形成了满足最低仰角条件的测站分布区域。
1)读取返回器的弹道文件,确定N取值;
2)确定θ0的取值;

3 仿真与验证
以“嫦娥五号”任务再入返回飞行过程为例开展典型场景下测站布设区域的仿真分析。飞行阶段返回器的空间位置如图4所示。
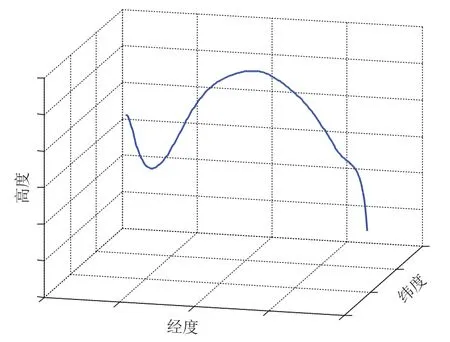
图4 返回器飞行曲线图Fig.4 The trajectory of reentry module
3.1 多窗口测站区域确定
根据图5中所述的区域,从中任意确定了4个测站的位置分别为A、B、C、D,上述位置的测站对返回器可见且仰角θ≥5°的时长如表1所示。根据表1可知,上述区域内任意选择的4个位置布设移动测站时,对返回器的可见时间均大于168 s,且测站工作仰角满足要求,返回器一次再入及最低点高度变化曲线如图6所示。
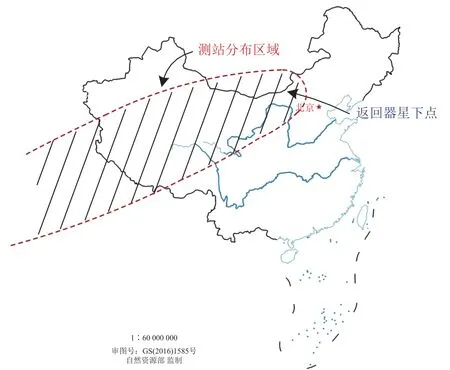
图5 对返回器可见的测站区域Fig.5 The ground station visible region for reentry module
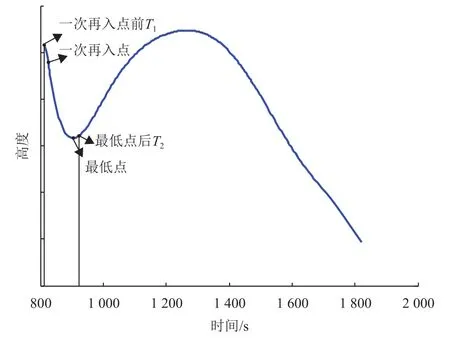
图6 返回器一次再入及最低点高度变化曲线Fig.6 The altitude of reentry module
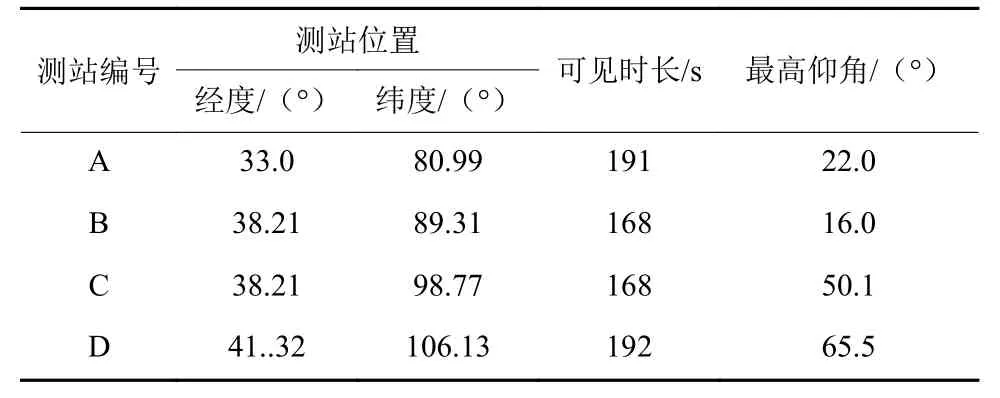
表1 移动测控站位置及对返回器可见时长Table 1 The position of space tracking ship,the visible duration and maximum elevation angle for tracking
3.2 海上测量船布设区域确定
返回器再入后,在印度洋上空飞行,陆上测站无法进行测控,为满足返回器一次再入前后测控需求,需在印度洋海域布设一艘测量船。对于测量船的布设,通常需要满足多个约束条件。如图7所示,首先实现入黑障前不小于T1的遥测跟踪覆盖,其次需要实现过最低点后不小于T2的外侧跟踪覆盖,保证返回器正常拉起过程的测控,最后测量船的最高工作仰角需要小于E1。
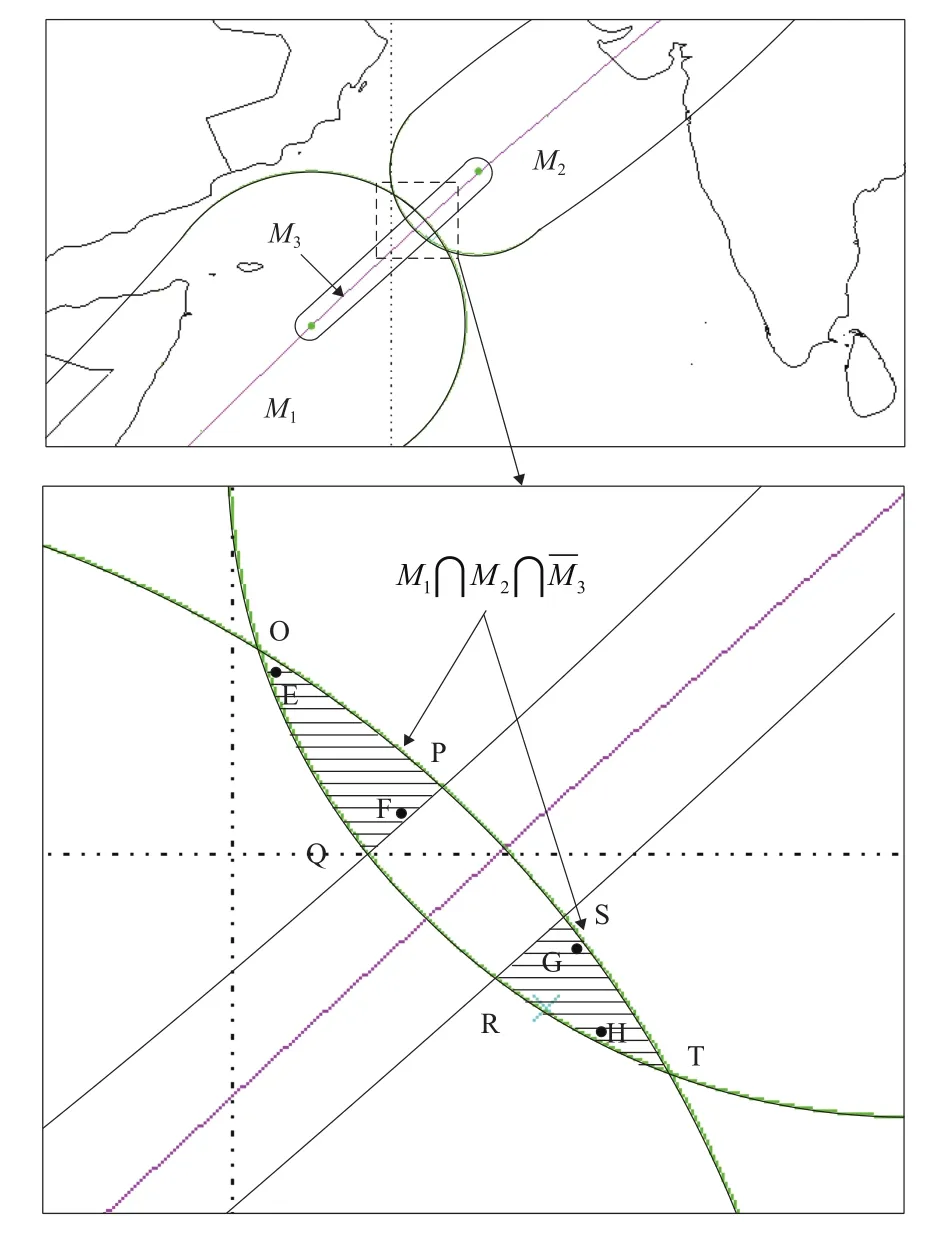
图7 海上测量船布设区域Fig.7 The space tracking ship visible region for reentry module
根据返回弹道,最终确定了满足要求的测量船布设区域,如图7所示,其中包含两个子区域,即由OPQ构成的区间和RST构成的区间。在上述的区间内布设测量船可以满足上述3个约束条件,保证测控覆盖时间满足要求,同时可以保证最低仰角条件。
根据图7中所述的区域,从中任意确定了4个测站的位置分别为E、F、G、H,上述位置计算结果如表2所示。根据表2可知,上述区域内任意选择的4个位置布设测量船时,对返回器入黑障前后的测控时间、工作仰角均满足要求。
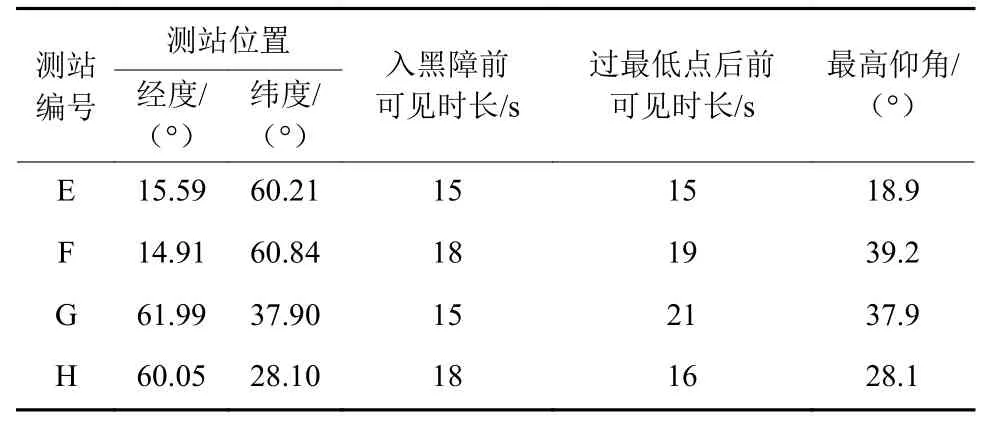
表2 海上测量船位置及对返回器可见时长Table 2 The position of ground station,the visible duration and maximum elevation angle for tracking
“嫦娥五号”任务中,在索马里以东的印度洋海域布设了航天测量船,利用光学测量、雷达测量获取一次再入过程的飞行轨迹。考虑到返回器一次出黑障后的弹道可能的散布范围较大,由卡拉奇站和在西藏阿里地区布设测控设备完成返回器一次出黑障后的捕获跟踪,由布设在新疆、青海、甘肃和内蒙古等地的地面雷达对返回器二次入黑障前到返回器开伞期间不间断的可靠跟踪测量,完成落点预报实现返回器顺利回收。
4 结 论
本文从再入返回任务测控分析过程中多窗口任务的测站位置选取以及应急测控过程中测控资源调度问题出发,提出了一种基于返回器状态的测站位置分布区域的模型,用于计算对返回器可见的地面站的位置。在此基础上,根据再入返回弹道进行仿真分析,结果表明,本文的方法提供的测站位置分布区域内,测站的工作情况满足要求。通过“嫦娥五号”再入返回飞行过程验证了本文方法的有效性和可用性。
本文方法在假设地球为标准椭球的情况下获得,用于对测控任务总体分析及应急资源调配提供总体依据,后续可根据需要结合地球的实际地形等因素,进行全面分析建模。
猜你喜欢
地理空间信息(2022年11期)2022-11-26 05:47:02
环球时报(2022-08-15)2022-08-15 17:13:41
军事文摘(2021年22期)2022-01-18 06:21:58
初中生世界·九年级(2020年2期)2020-04-10 06:47:22
测绘学报(2018年10期)2018-10-26 06:12:16
城市勘测(2018年1期)2018-03-15 03:37:02
智富时代(2017年7期)2017-09-05 10:08:11
科技视界(2016年15期)2016-06-30 12:48:10
科技创新导报(2014年9期)2014-11-07 00:36:18
地理空间信息(2013年4期)2013-09-28 07:42:12